由于连续域的工程设计法(见附录B)已广泛地应用于各种模拟系统的设计中,为工程技术人员所熟悉,因此如何用数字化的方法实现这些控制规律,是本节首先要讨论的内容。用工程设计法设计的串联校正环节,一般为P、PI、PD或PID等调节器,其中又以PI或PID调节器应用最为广泛。
1.数字PID调节器的实现
知道了PID调节器如何数字化,如何实现P、PI、PD等调节器也就一目了然了。因此,本节将仅介绍PID调节器的数字化实现方法。设PID调节器如图1-2所示。
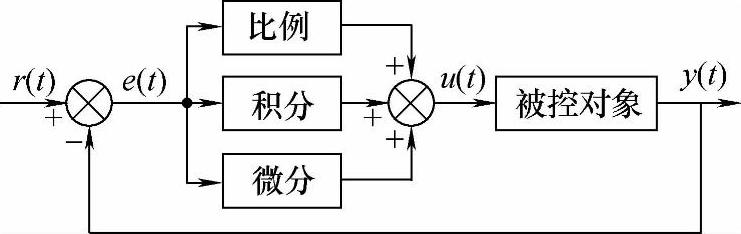
图1-2 PID调节器的框图
调节器的输出和输入之间为比例-积分-微分关系,即

若以传递函数的形式表示,则为

式中,u(t)为调节器的输出信号;e(t)为调节器的偏差信号;Kp为比例系数;Ki为积分系数,Ki=Kp/τi;Kd为微分系数,Kd=Kpτd;τi为积分时间常数;τd为微分时间常数。
控制系统中使用的数字PID调节器,就是对式(1-3)离散化,得

式中,T为采样周期,显然要保证系统有足够的控制精度,在离散化过程中,采样周期T必须足够短;Ki′为采样后的积分系数,Ki′=KpT/τi;Kd′为采样后的微分系数,Kd′=Kpτd/T。式(1-4)也称作位置式PID调节器,其算法实现流程如图1-3所示。其特点是调节器的输出u(kT)跟过去的状态有关,系统运算工作量大,需要对e(kT)作累加,这样会造成误差积累,影响控制系统的性能。
目前,实际系统中应用比较广泛的是增量式PID调节器。所谓增量式PID调节器是对位置式PID调节器的式(1-4)取增量,数字调节器的输出只是增量Δu(kT)。

增量式PID调节器算法和位置式PID调节器算法本质上并无大的差别,但这一点算法上的改动,却带来了不少优点:
1)数字调节器只输出增量,当控制芯片误动作时,Δu(kT)虽有可能有较大幅度变化,但对系统的影响比位置式PID调节器小,因为u(kT)的大幅度变化有可能会严重影响系统运行。
2)算式中不需要做累加,增量只跟最近的几次采样值有关,容易获得较好的控制效果。由于式中无累加,消除了当偏差存在时发生饱和的危险。
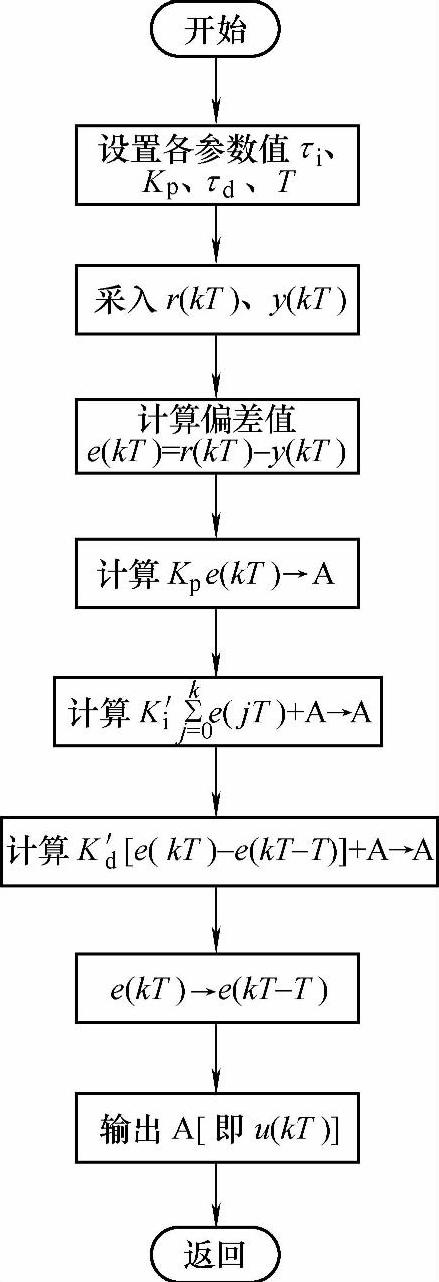
图1-3 位置式PID调节器算法框图
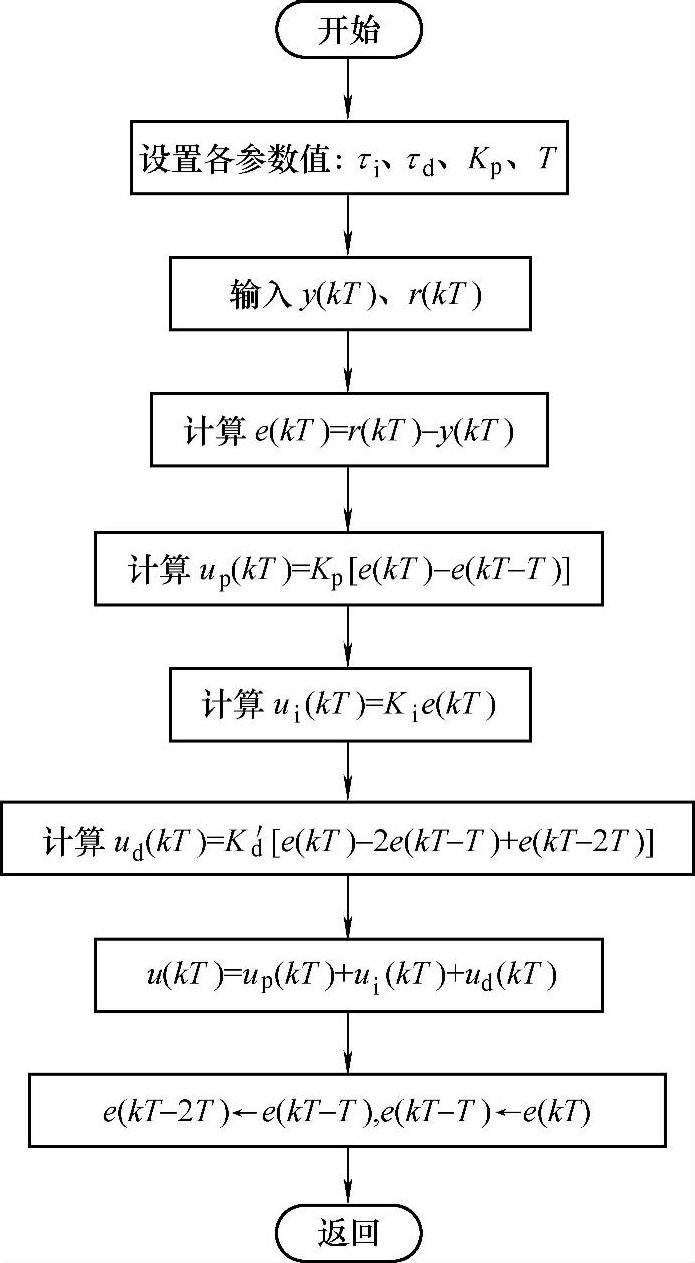
图1-4 增量式PID调节器算法框图
2.PID调节器参数对控制性能的影响(https://www.daowen.com)
(1)比例调节器Kp对系统性能的影响
1)对动态特性的影响:比例调节器Kp加大,使系统的动作灵敏、速度加快;Kp偏大,振荡次数增多,调节时间增长;当Kp太大时,系统会趋于不稳定。若Kp太小,又会使系统的动作缓慢。
2)对稳态特性的影响:加大比例调节器Kp,在系统稳定的情况下,可以减少稳态误差,提高控制精度,但加大Kp只减小误差,却不能完全消除稳态误差。
(2)积分调节器τi对控制性能的影响 积分调节器通常与比例调节器或微分调节器联合作用,构成PI或PID调节器。
1)对动态特性的影响;积分调节器τi通常使系统的稳定性下降,τi太小,系统将不稳定;τi偏小,振荡次数较多;τi太大,对系统性能的影响减小。当τi合适时,过渡特性比较理想。
2)对稳态特性的影响:积分调节器τi能消除系统的稳态误差,提高控制系统的控制精度。但若τi太大,积分作用太弱,以致不能减小稳态误差。
(3)微分调节器τd对控制性能的影响 微分调节器不能单独使用,经常与比例调节器或积分调节器联合作用,构成PD调节器或PID调节器。
微分调节器的作用,实质上是跟偏差的变化速率有关,通过微分调节器能够预测偏差,产生超前的校正作用,可以较好地改善动态特性,如超调量减少,调节时间缩短,允许加大比例调节器作用,使稳态误差减小,提高控制精度等。但当τd偏大时,超调量较大,调节时间较长。当τd偏小时,同样超调量和调节时间也都较大。只有τd取得合适,才能得到比较满意的控制效果。
把三者的调节器作用综合起来考虑,不同调节器规律的组合,对于相同的控制对象,会有不同的控制效果。一般来说,对于控制精度要求较高的系统,大多采用PI或PID调节器。
3.PID参数整定
(1)归一化参数的整定法 有实践经验的技术人员都会体会到调节器参数的整定乃是一项繁琐而又费时的工作。虽然,可用工程设计方法来求出调节器的参数,但是这种方法本身基于一些假设和简化处理,而且参数计算依赖于电机参数,实际应用时,依然需要现场的大量调试工作,针对此种情况,近年来国内外在数字PID调节器参数的工程整定方面做了不少研究工作,提出了不少模仿模拟调节器参数整定的方法,如扩充临界比例度法、扩充响应曲线法、经验法、衰减曲线法等,都得到了一定的应用。这里介绍一种简易的整定方法——归一参数整定法。
由PID的增量算式(1-5)可知,调节器的参数整定,就是要确定T、Kp、τi、τd四个参数,为了减少在线整定参数的数目,根据大量实际经验的总结,人为假设约束的条件,以减少独立变量的个数,整定步骤如下:
1)选择合适的采样周期T,调节器作纯比例Kp控制。
2)逐渐加大比例系数Kp,使控制系统出现临界振荡。由临界振荡过程求得相应的临界振荡周期Ts。
3)根据一定约束条件,例如取T≈0.1Ts、τi≈0.5Ts、τd≈0.125Ts,相应的差分方程由式(1-5)变为
Δu(kT)=Kp[2.45e(kT)-3.5e(kT-T)+1.25e(kT-2T)](1-6)
由式(1-6)可看出,对四个参数的整定简化成了对一个参数Kp的整定,使问题明显地简化了。应用约束条件减少整定参数数目的归一参数整定法是有发展前途的,因为它不仅对数字PID调节器的整定有意义,而且对实现PID自整定系统也将带来许多方便。
(2)变参数的PID调节器 交流调速系统实际运行过程中不可预测的干扰很多。若只有一组固定的PID参数,要在各种负载或干扰以及不同转速情况下,都满足控制性能的要求是困难的,因此必须设置多组PID参数,当工况发生变化时,能及时改变PID参数以与其相适应,使过程控制性能最佳。目前可使用的有如下几种形式:
1)对控制系统根据工况不同,采用几组不同的PID参数,以提高控制质量,控制过程中,要注意不同组参数在不同运行点下的平滑过渡。
2)模拟现场操作人员的操作方法,把操作经验编制成程序,然后由控制软件自动改变给定值或PID参数。
3)编制自动寻优程序,一旦工况变化,控制性能变坏,控制软件执行自动寻优程序,自动寻找合适的PID参数,以保持系统的性能处于良好的状态。
考虑到系统控制的实时性和方便性,第一种形式的变参数PID调节器应用比较多。对于自动寻优整定法涉及自动控制理论中最优控制方面的知识和理论,可见参考文献[6]。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





