调速器工作特性与调速器的结构和设计参数有关,前已说明,作为初步设计可以采用静力学计算,进一步的研究则需进行动态过程的分析,由于篇幅所限,本书只介绍飞锤式调速器的静力计算方法。
在计算前,先对调速器进行简化,简化后的物理模型如图7-11a所示。尽管飞锤形状较为复杂,但可把它作如下简化:求出飞锤的质心,把飞锤的质量集中在其质心处并置于无质量的L形杠杆的一端上,L形杠杆能绕飞锤销中心A转动,其另一端与调速套筒接触,因此飞锤在离心力作用下,可经L形杠杆推动调速套筒轴向移动,调速套筒的另一端有等效的调速弹簧力作用,等效调速弹簧是根据调速器调速弹簧的结构和位置尺寸,将其作用力转化到调速套筒的轴向位置上的假想弹簧。计算中,忽略运动件的摩擦力,由于飞锤对称,故飞锤重力对调速套筒的作用相互抵消。因此,经简化后剩下的力只有两个,即飞锤离心力Fc(若再进一步换为套筒的轴向分力即为式(7-1)所示的飞锤支持力F)和等效弹簧的恢复力FE(即式(7-3)所示的E)。柴油机转速一定时,可算出Fc和FE的数值。在Fc和FE的综合作用下,调速套筒处于某一轴向平衡位置Z,而调速套筒经杠杆与喷油泵齿杆连接,因此可以通过相应的几何关系进一步计算出齿杆位移S随转速n的变化关系,即调速器的工作特性或调速特性。
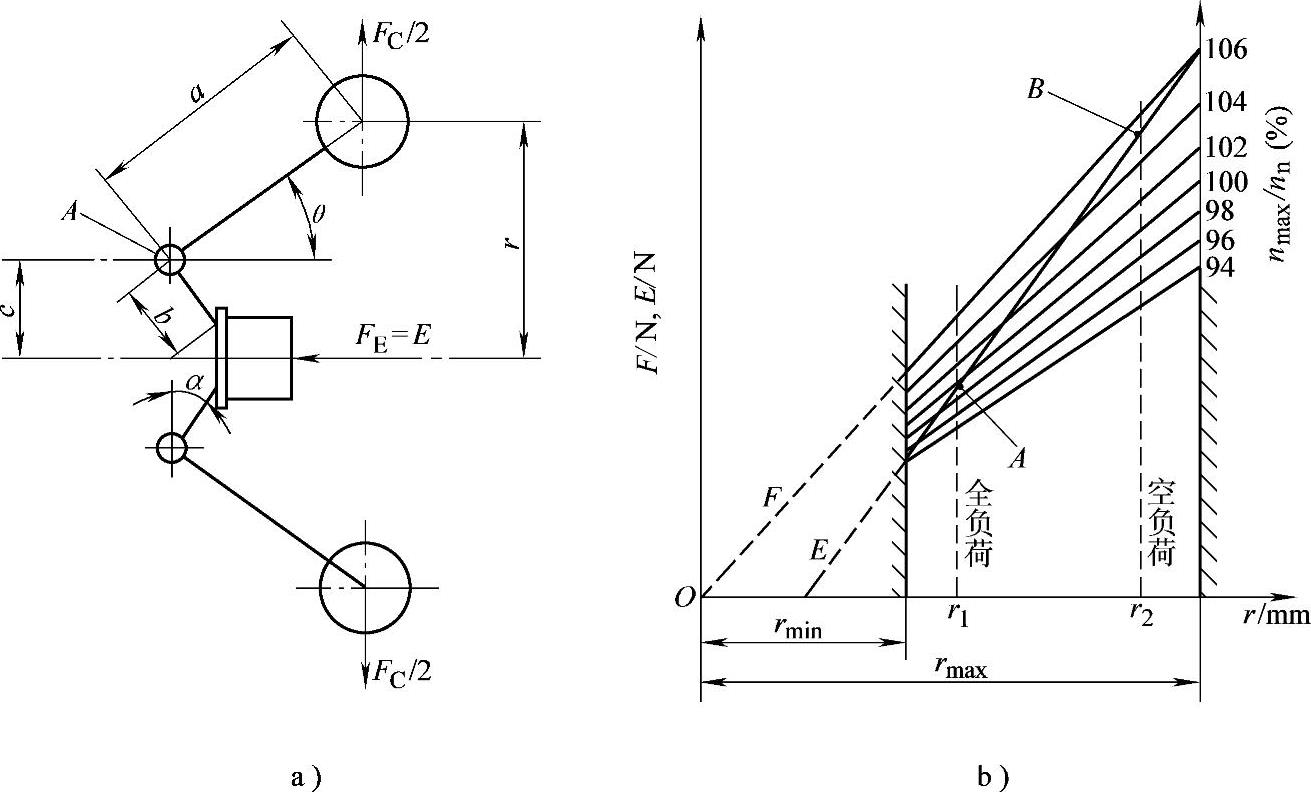
图7-11 调速器的静力学计算
a)简化模型 b)静力学平衡图表
计算时离心力Fc可按下式求得:
Fc=0.001Mω2pr (7-12)
式中,Fc为离心力(N);M为飞锤总质量(kg);r为飞锤质心旋转半径(mm);ωp为调速器轴的角速度(rad/s),它可由调速器转速求得。
弹簧恢复力FE则与式(7-3)相同,即
FE=E=E0+KZ(7-13)
式中,K为等效调速弹簧刚度(N/mm);Z为调速套筒位移(mm);E0为等效调速弹簧预紧力(N)。
再按图7-11a求出飞锤质心径向位移与调速套筒位移的几何关系,由于设计调速器时,L形杠杆臂的夹角一般取为90°,故有α=θ,设飞锤处于合拢最内位置(r=rmin)时,调速套筒位移Z0=0,则飞锤径向位移Δr=r-rmin与相应调速套筒位移Z之间的关系,可按以下方法求出。
当转速不变时,对飞锤销中心A存在力矩平衡,有
Fcacosθ=FEbcosα
由于α=θ,可得(https://www.daowen.com)

按虚位移原理,有
FEZ=FcΔr
将式(7-14)代入上式后,即得

式(7-14)中,FE=Fca/b即相当弹簧的恢复力E,也应等于飞锤离心力Fc转化到调速器套筒方向的支持力F,因为在稳定工况下,两者应当相等(参见式(7-4)和式(7-12))。由此可得

这样,也就求出了前面式(7-1)中的惯性力系数A=0.001Mra/b,由此可见,它与飞锤质量M和飞锤质心的回转半径r有关。
为了对于调速器静力平衡有一个形象明确的概念,可以用图7-11b所示的静力学平衡图来加以说明。
对于不同转速,支持力F与飞锤半径r之间的关系是一组通过坐标原点的直线族。由于结构的限制,r可能变化的范围只是rmin~rmax。
为了把弹簧恢复力FE=E也画在同一图上,可将原为调速套筒位移Z函数的E转换成飞锤位移Δr=r-rmin的函数,即将式(7-15)代入式(7-13)后,可得

式中,bK/a为图7-11b中弹簧恢复力E曲线的斜率。调速器操纵杆位置改变,代表恢复力E的斜线在图中平行移动。例如,由调速器结构确定出全负荷和空负荷时最高转速的飞锤位置为r1和r2,由式(7-15)也就确定了调速套筒位移Z1和Z2,相应得出齿杆位移S1和S2(对应图7-6中的C点和D点)。如图7-11b所示,曲线E和曲线族F在A点(全负荷)和B点(在空负荷)相交,对照右边纵坐标轴上的nmax/nn值,可查得调速器稳定调速率约为5%。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





