(一)集成RE、RP系统的开发过程
图7-7所示为集成RE、RP系统的开发过程,其大致内容有以下几点:
(1)借助三维测量设备,对实物模型进行三维数据的测量,以获取实物模型的三维点云数据。
(2)对获取的三维点云数据进行预处理,内容包括对采集到的三维点云数据去除噪声点、精简、去除冗余点、分割处理,其目的是便于在后续的工艺过程中提高处理速度和建模精度。
(3)对处理好的三维点云数据进行模型的重构,获得初始的STL模型。
(4)对初始的STL模型进行模型的综合优化,其目的是修改三角网格和三角形大小,对三角形个体形状和三角网格群体进行多方面优化,再生成RP设备所需的STL格式文件。
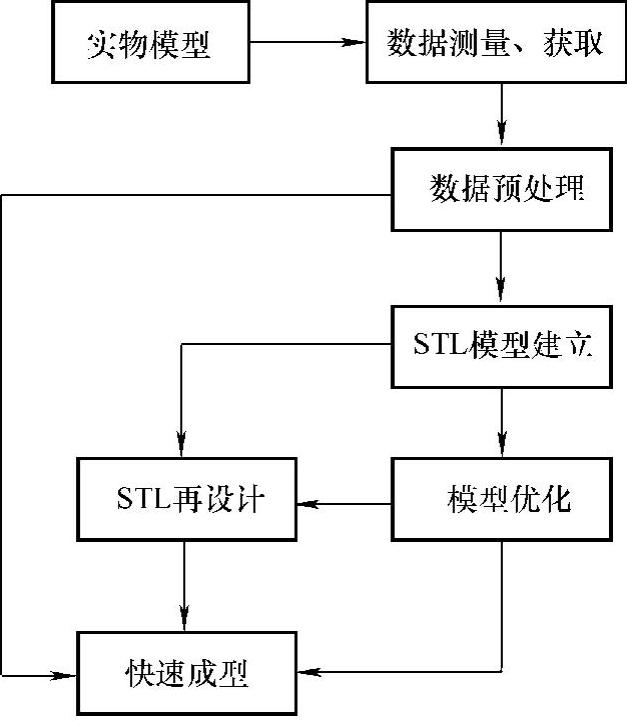
图7-7 集成RE、RP系统的开发过程
(5)通过编辑、拼合和分割等技术,对STL模型再次进行修改与研发等设计,确保STL模型准确无误并符合开发需求,最后输入到RP制造系统,对其进行快速的原型制作。
(二)集成RE、RP系统的实现方法
(1)开发一个CAD/CAE/CAM/RP的集成系统,通常一些著名的且具有软件开发实力的CAD软件商才具备这样的能力。
(2)将RE数据的测量、处理及转换等相关内容与CAD/CAE/CAM系统集成,整个系统以商品化的CAD/CAE/CAM系统为中心,由三维数字化测量系统、模型分析、重建、设计系统和加工制造子系统部分构成。测量系统借助数据转换器实现模型的分析、重建、设计及加工制造系统的柔性集成,所得的测量数据可根据后续需要,选择CAD模型重建、RP原型制造或数控加工,还可通过本地或异地的Internet实现系统的最佳集成。
该系统可选择通用文件格式(如IGES、STEP、STL等格式)进行转换,但在文件转换过程中可能会丢失一些特征信息,这就需要有效地利用CAD/CAE/CAM系统的功能,并借助一些成熟的商用CAD软件(如Pro/E、UG、I-deas等软件)进行模型的修改与再设计。
(三)基于RE、RP集成系统的新产品快速开发
新产品的快速研发是关系到企业可持续发展的一项重要活动,也是带给企业活力和增强其竞争能力的关键因素之一。产品开发与管理协会的一项近期统计表明,经营成功的高新技术企业里有50%以上的销售额来源于新产品的研发。目前,我国企业相对比较薄弱的环节就是产品自主开发能力方面的欠缺。因此,如何掌握及灵活运用产品的快速研发技术,对企业加速新产品的研发过程、增强自主创新能力等都具有重要的现实意义。
一般情况下,新产品的研发过程大致包括以下四个阶段:产品的规划、设计、样品试验、生产准备。其中,建立产品的三维CAD数据模型是产品设计的重点,即只有建立起所需产品的三维CAD模型,才能利用各种相关技术进行产品分析、设计与制造、装配以及后续的研发工作。图7-8所示为基于RE、RP集成系统的新产品快速开发流程。
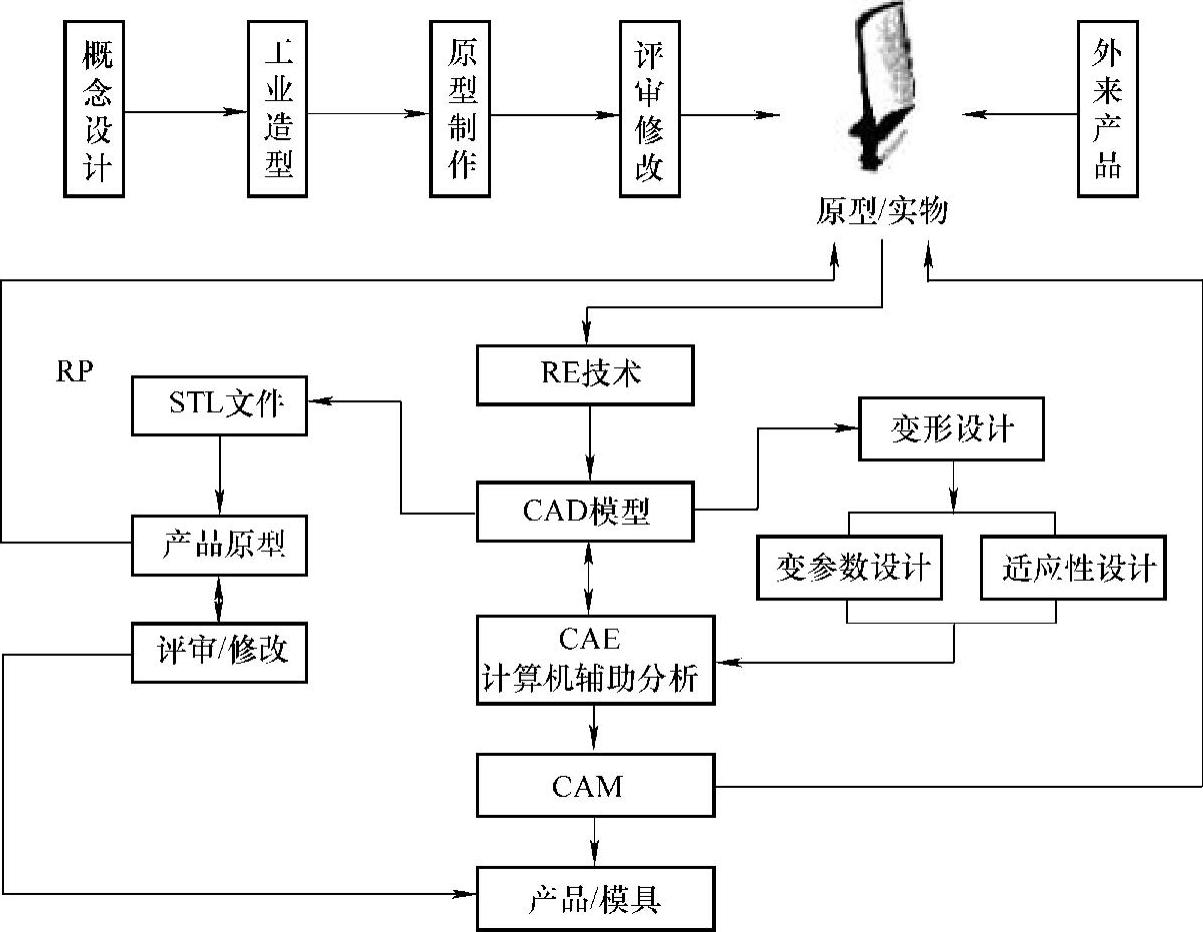
图7-8 基于RE、RP集成系统的新产品快速开发流程
(四)基于RE、RP集成系统的新产品快速开发实例
以下基于RE、RP集成系统,以鼠标的设计与制作过程为例,对鼠标进行设计与新产品的研发。
1.数据采集阶段 以深圳智泰公司研发的LSH800三维激光扫描机来进行三维数据的采集。该设备的工作方式属于非接触测量,特点是测量速度快,扫描分辨率高,数据点密集,适用于外部曲面复杂的零件模型的测量。图7-9所示为采用LSH800三维激光扫描机对鼠标进行三维数据的采集工作。图7-10所示为扫描完成后得到的鼠标原始点云数据资料。(https://www.daowen.com)

图7-9 采用LSH800三维激光扫描机对鼠标进行三维数据的采集
图7-10 鼠标原始点云数据资料
2.数据处理 数字化测量得到的点云数据不可避免地存在一些问题,需对数据进行处理。点云数据的处理包括噪声去除、多视对齐、数据精简和数据分割等。
(1)噪声去除。在实际的三维数据的测量过程当中,因为受到人为或环境等因素的影响,难免会将一些多余的点云数据当作是实物上的点云数据一起扫描出来,即噪声点,为了消除噪声点对后续实物模型重构的影响,必须对测量点云进行滤波,去除噪声点。
(2)多视对齐。有些实物的尺寸过大或几何形状复杂,在测量时往往不能一次测出其所有数据,需要从不同位置多视角进行测量,然后再将所测点云进行对齐与拼接。
(3)数据精简。经三维测量所得到的点云数据量极大,而且其中还有大量冗余数据,因此一般情况下,原始数据资料无法直接用于实物的曲面构造,必须进行数据的精简工作,如采用等间距缩减、倍率缩减、等量缩减、等分布密度法或最小包围区域法等方法进行数据的缩减。
(4)数据分割。为了方便后续的模型的曲面重构,有必要对点云数据进行数据划分(分割),即根据组成实物的外形曲面,将属于同一子曲面类型的数据组成同一个组。
利用三维扫描仪采集的无序点数据几十万、上百万甚至更多,数据处理的工作量很大,所以为了获得完整、正确的测量数据,以方便后续的造型工作,在模型重建之前需要对测量数据进行以上4步预处理。采用Imageware软件对鼠标原始点云进行上面所述的4步预处理后,得到的鼠标点云如图7-11所示。
3.曲面重构 测量点云重构实物的三维CAD模型是对整个RE、RP集成系统进行新产品快速开发最重要的内容之一,后续的产品的再设计、产品的快速成型制造、仿真以及工程分析等,都需要三维CAD数据模型的支持。图7-12~图7-14所示为根据用户需求,重构鼠标的三种不同的方案。
图7-11 预处理后的鼠标点云
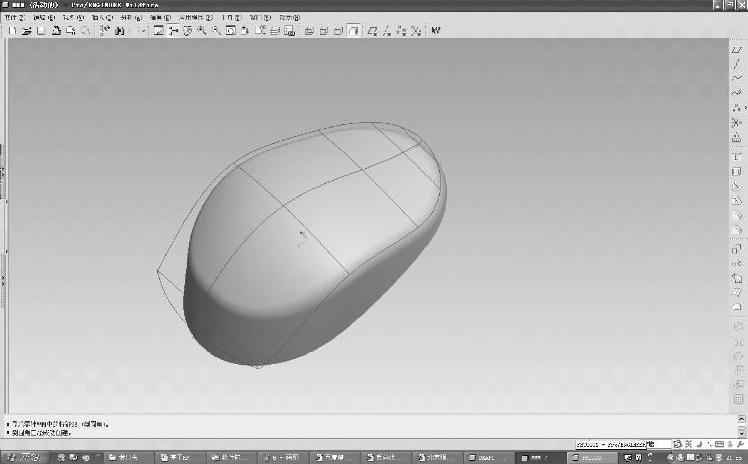
图7-12 重构鼠标方案一
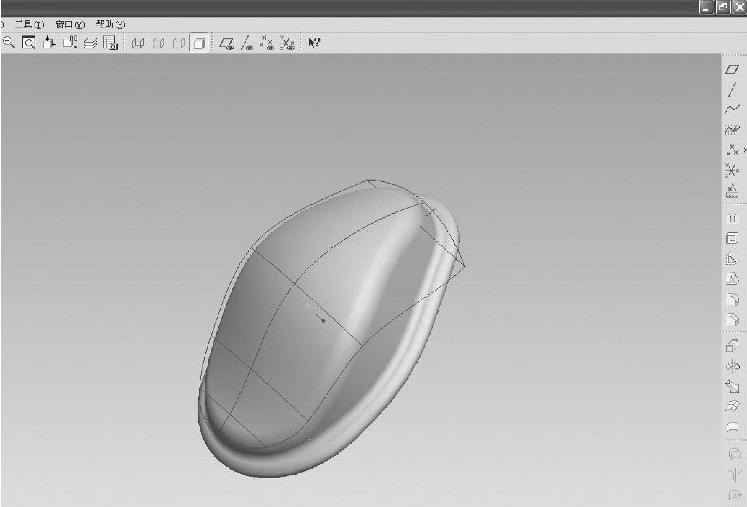
图7-13 重构鼠标方案二
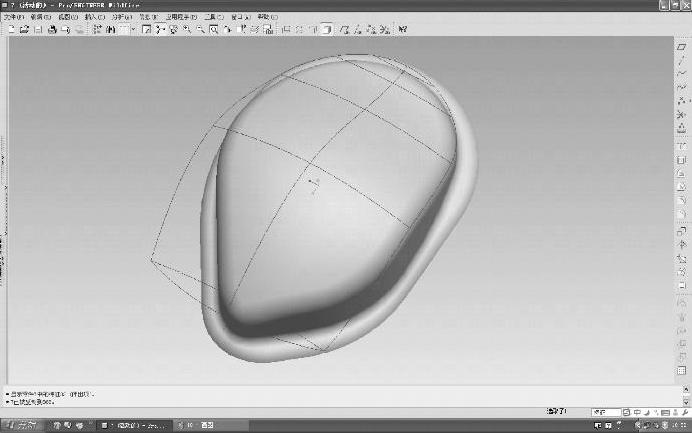
图7-14 重构鼠标方案三
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





