力/转矩一般用来模拟机构运动的外部环境,在机构中施加力可以改变机构的运动。Creo运动仿真可以施加的力或转矩类型有“点力”“主体转矩”“点对点力”等。
下面举例说明定义力的操作过程。在本章第5.2节中,曾举例模拟了放在斜面上的滑块由于自身重力而沿着斜面下滑的过程。现假设滑块处于斜面底部时,在滑块零件上某一位置施加一个平行于斜面的点力,当力足够大时,滑块克服重力与摩擦的影响将沿斜面向上运动。
Step1.将工作目录设置至D:\creo4.16\work\ch05.07\,打开文件gra_asm.asm。
Step2.进入机构模块。单击 功能选项卡
功能选项卡 区域中的“机构”按钮
区域中的“机构”按钮 ,进入机构模块。
,进入机构模块。
说明:在该机构中,摩擦、重力与初始条件均已定义完毕。
Step3.在滑块中添加一个点力。
(1)选择命令。在 功能选项卡中单击
功能选项卡中单击 区域中的“力/转矩”按钮
区域中的“力/转矩”按钮 ,系统弹出图5.7.1所示的“电动机”操控板。
,系统弹出图5.7.1所示的“电动机”操控板。

图5.7.1 “电动机”操控板
(2)定义力的位置参考。在机构中选择图5.7.2所示的点为力的位置参考。
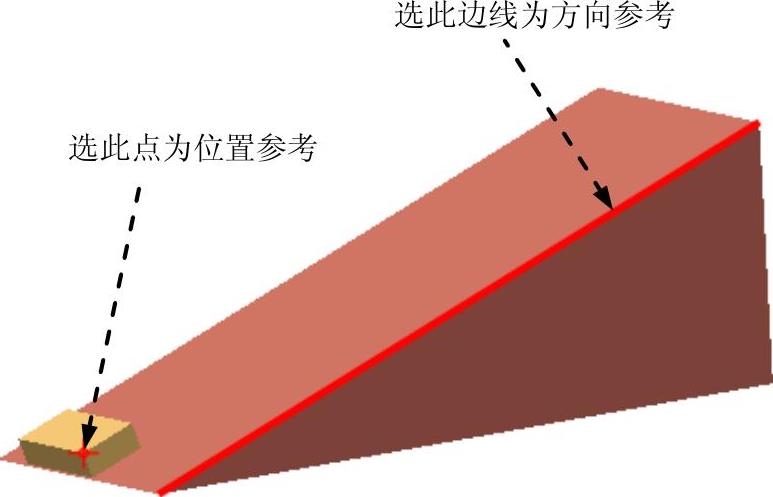
图5.7.2 选取参考对象
(3)定义力的大小。在“电动机”操控板中单击 选项卡,在
选项卡,在 下拉列表中选择
下拉列表中选择 选项,在
选项,在 文本框中输入值4.7,单击图形按钮
文本框中输入值4.7,单击图形按钮 ,系统弹出图5.7.3所示的“图形工具”对话框。该对话框中显示力/转矩轮廓图。
,系统弹出图5.7.3所示的“图形工具”对话框。该对话框中显示力/转矩轮廓图。
(4)定义力的方向。在“电动机”操控板中单击 选项卡(如图5.7.4所示),在
选项卡(如图5.7.4所示),在 区域选中
区域选中 单选项,然后选择图5.7.2所示的边线为力的方向参考,单击
单选项,然后选择图5.7.2所示的边线为力的方向参考,单击 按钮,使力的方向如图5.7.5所示。
按钮,使力的方向如图5.7.5所示。
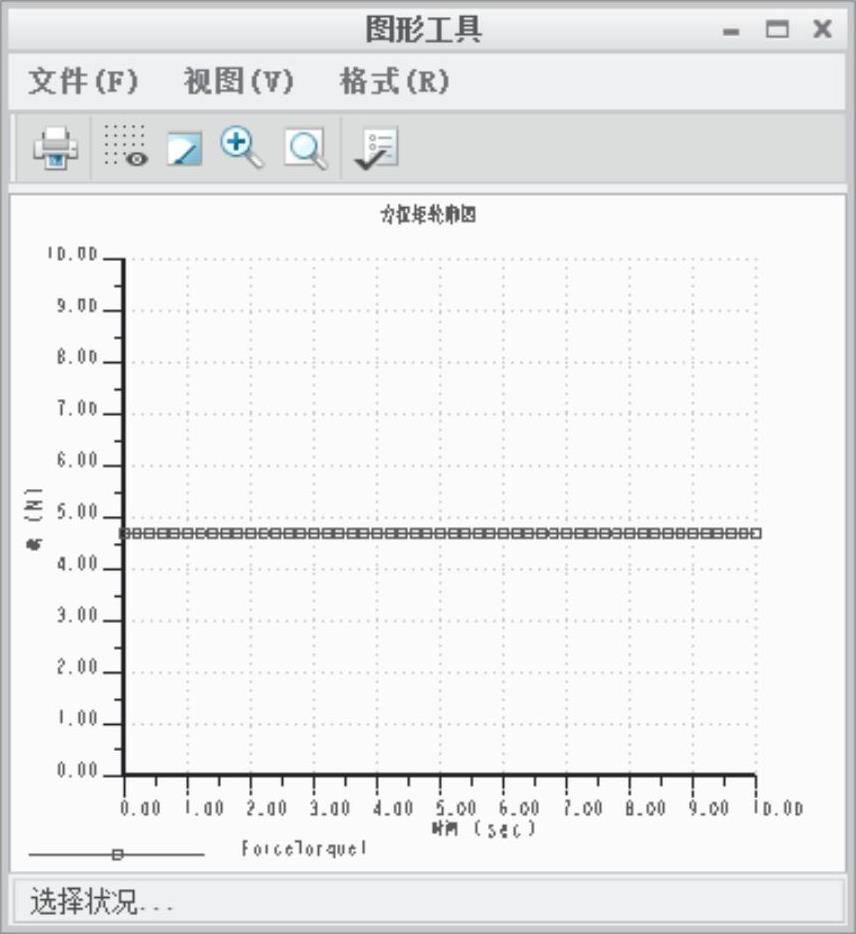
图5.7.3 “图形工具”对话框
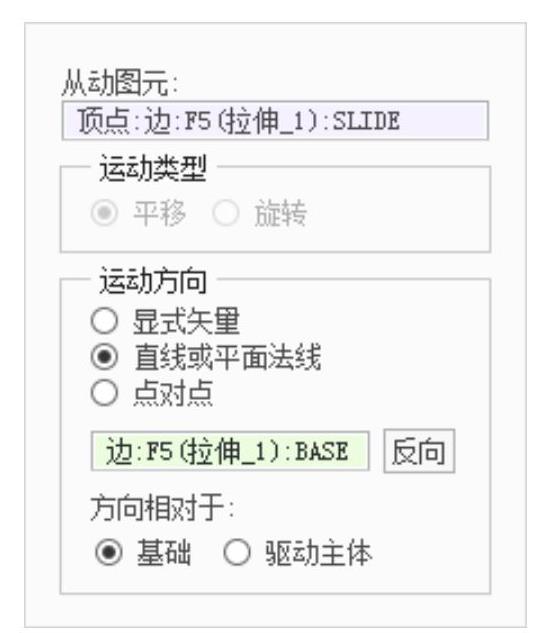
图5.7.4 “参考”选项卡
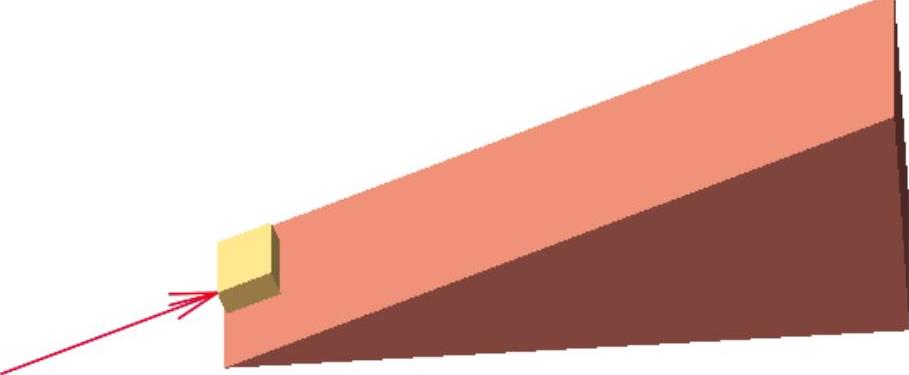
图5.7.5 定义方向
图5.7.4所示的 选项卡中部分选项说明如下。
选项卡中部分选项说明如下。
●  :选取一个坐标系并通过该坐标系的坐标轴矢量来定义方向,默认的坐标系是机构的WCS,如图5.7.6所示。
:选取一个坐标系并通过该坐标系的坐标轴矢量来定义方向,默认的坐标系是机构的WCS,如图5.7.6所示。
●  :选取机构中元件的直边、曲线或轴线来定义方向。
:选取机构中元件的直边、曲线或轴线来定义方向。
●  :选取机构中元件上的两个点来定义方向,具体方向为所选择的第1点指向第2点,如图5.7.7所示。
:选取机构中元件上的两个点来定义方向,具体方向为所选择的第1点指向第2点,如图5.7.7所示。
(5)单击操控板中的 按钮,完成力的定义。(www.daowen.com)
按钮,完成力的定义。(www.daowen.com)
Step4.定义动态分析。
(1)选择命令。单击 区域中的“机构分析”按钮
区域中的“机构分析”按钮 ,系统弹出“分析定义”对话框。
,系统弹出“分析定义”对话框。
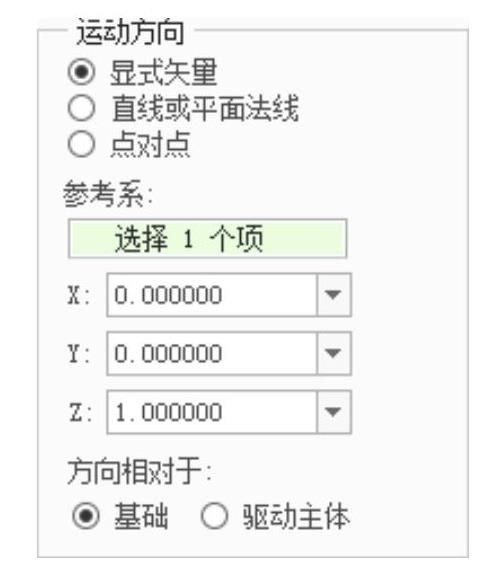
图5.7.6 显式矢量
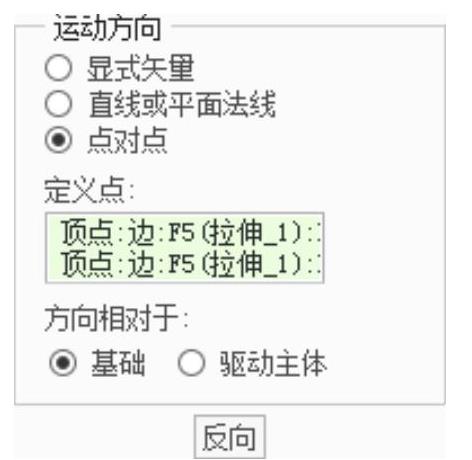
图5.7.7 “点对点”界面
(2)定义分析类型。在 下拉列表中选择
下拉列表中选择 选项。
选项。
(3)定义图形显示。在 选项卡的
选项卡的 文本框中输入值1.5,在
文本框中输入值1.5,在 文本框中输入值50。
文本框中输入值50。
(4)定义初始配置。在 区域中选择
区域中选择 单选项。
单选项。
(5)定义外部载荷。单击 选项卡,选中
选项卡,选中 和
和 复选框。
复选框。
(6)运行运动分析。单击“分析定义”对话框中的 按钮,查看机构的运行状况,此时滑块的位置如图5.7.8所示。
按钮,查看机构的运行状况,此时滑块的位置如图5.7.8所示。
(7)单击 按钮,完成运动分析。
按钮,完成运动分析。
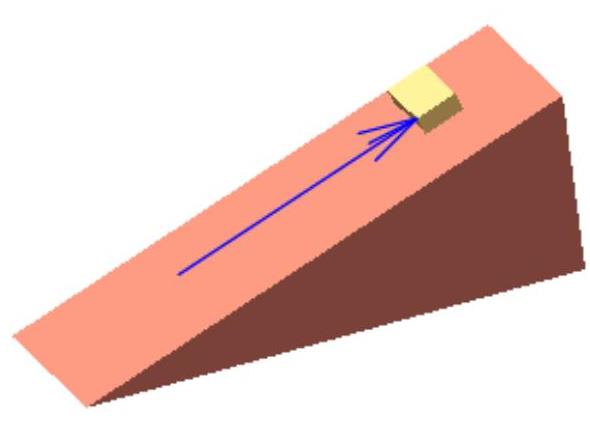
图5.7.8 滑块位置(一)
Step5.再生模型。单击 功能选项卡
功能选项卡 区域中的“重新生成”按钮
区域中的“重新生成”按钮 ,再生机构模型。
,再生机构模型。
Step6.保存机构模型。
说明:
● 如果在图5.7.9所示的机构树中右击力/转矩节点 ,选择
,选择 命令,在“力/转矩定义”对话框中将力的大小修改为4.5,然后再运行机构动态分析,可以观察到由于施加力的变小,滑块的位移也变小(图5.7.10)。
命令,在“力/转矩定义”对话框中将力的大小修改为4.5,然后再运行机构动态分析,可以观察到由于施加力的变小,滑块的位移也变小(图5.7.10)。
● 如果将力的大小改为3,可以观察到由于推力不够,滑块不会向上移动。
● 如果将力的大小改为0.3,可以观察到由于重力的作用,滑块依然会向下滑动。
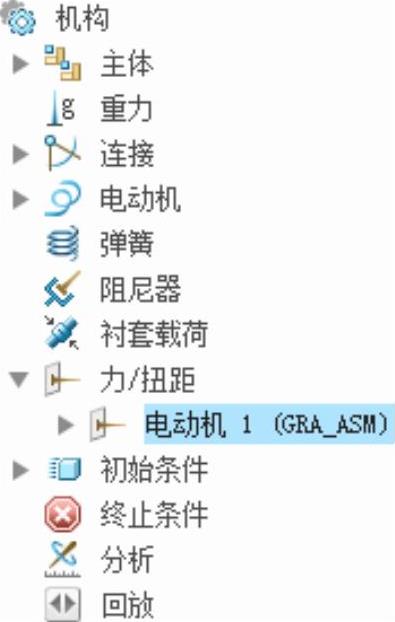
图5.7.9 机构树
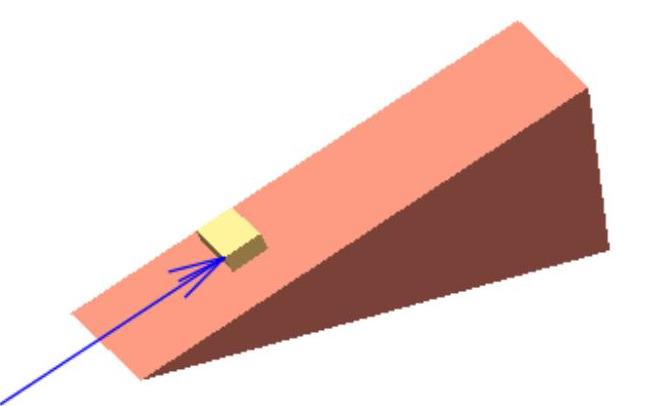
图5.7.10 滑块位置(二)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






