范例概述:
本范例将介绍万向节机构的创建过程,在该机构中基座为固定主体,两支轴叉安装在基座上并分别采用圆柱连接,轴叉之间添加万向连接约束,十字轴采用圆柱约束安装在轴叉中对应的孔上,当机构中的任一轴叉旋转时,可以带动十字轴及另一轴叉旋转。在本范例中,读者要注意万向(Gimbal)连接的应用技巧和注意事项,另外在设计轴叉时,要预先在配合位置添加基准坐标系,以用于创建万向约束。万向节机构模型如图3.16.1所示。
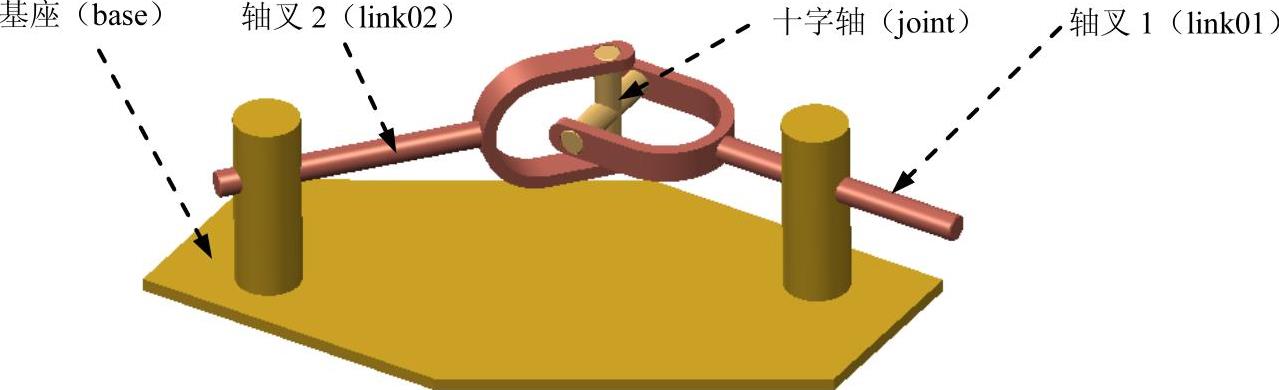
图3.16.1 万向节机构
Step1.将工作目录设置至D:\creo4.16\work\ch03.16。
Step2.新建文件。新建一个装配模型,命名为gimba_asm,选取 模板。
模板。
Step3.引入基座元件BASE.PRT,并使用 约束完全约束该元件。
约束完全约束该元件。
Step4.引入第一个轴叉元件LINK01.PRT,并将其调整到图3.16.2所示的位置。
Step5.创建轴叉1(link01)与基座(base)之间的圆柱连接1。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图3.16.2中的两条轴线为“轴对齐”约束参考,此时
按钮,分别选取图3.16.2中的两条轴线为“轴对齐”约束参考,此时 界面如图3.16.3所示。
界面如图3.16.3所示。
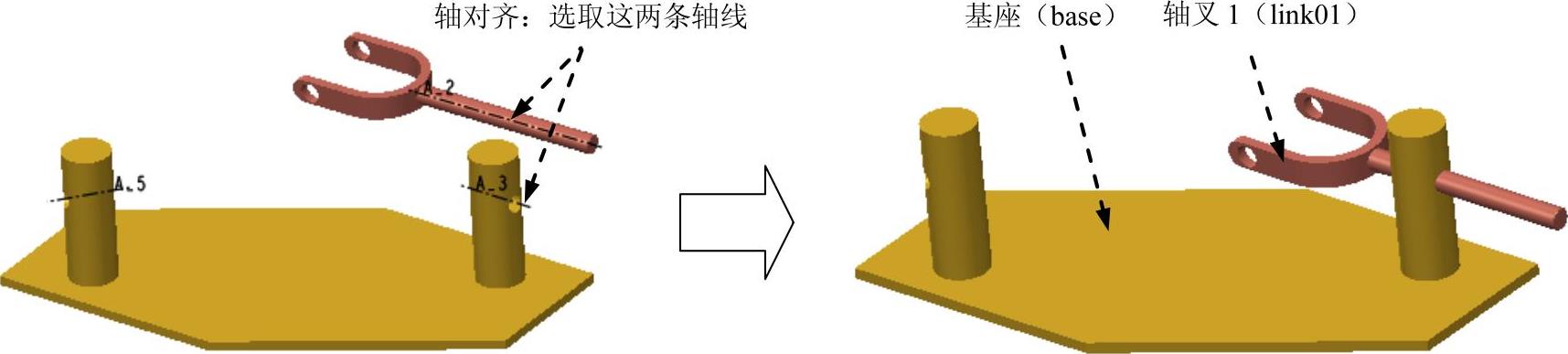
图3.16.2 创建圆柱(Cylinder)连接1
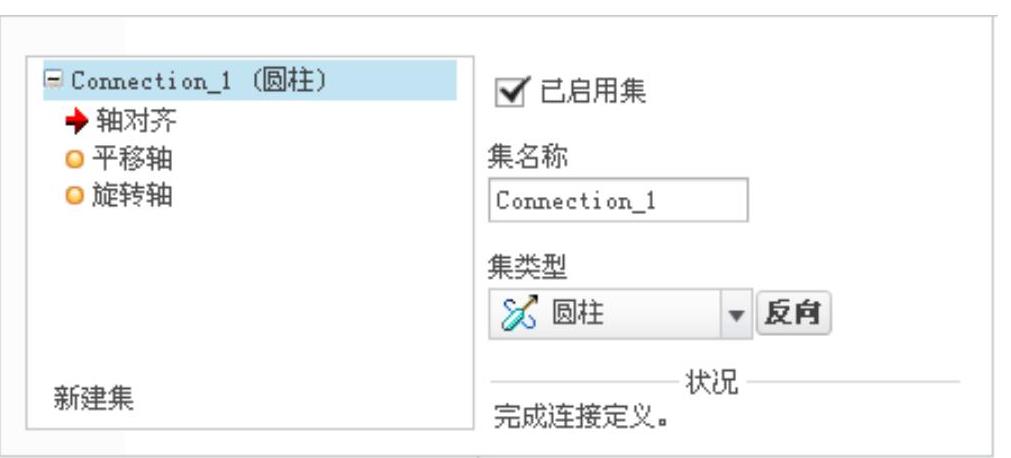
图3.16.3 “放置”界面
(3)拖动轴叉1至图3.16.2所示的大致位置。
Step6.单击操控板中的 按钮,完成圆柱连接的创建。
按钮,完成圆柱连接的创建。
Step7.引入第二个轴叉元件LINK02.prt,并将其调整到图3.16.4所示的位置。
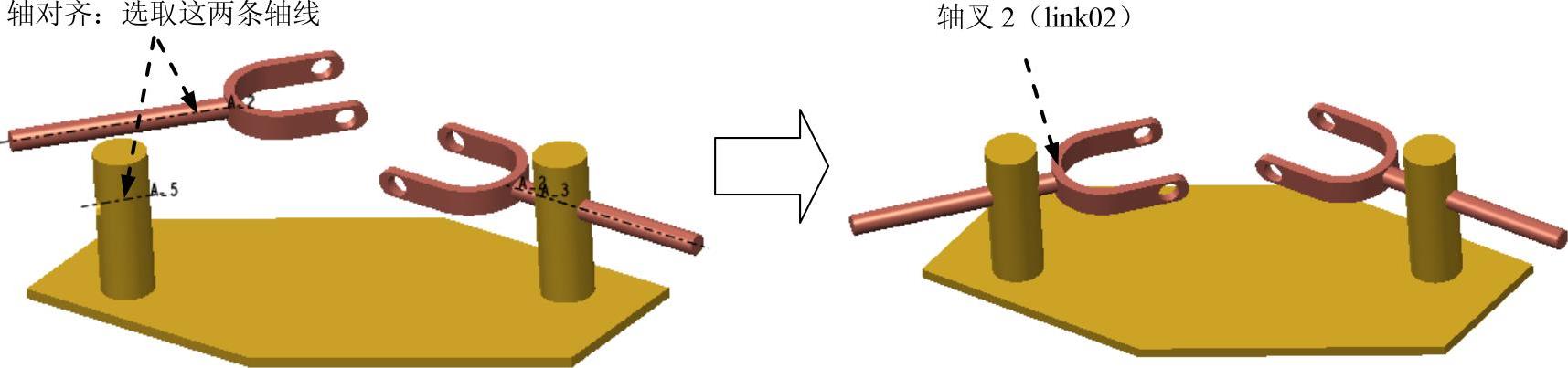
图3.16.4 创建圆柱(Cylinder)连接2
Step8.创建轴叉2(link02)与基座(base)之间的圆柱连接2。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束。单击操控板中的 按钮,分别选取图3.16.4中的两条轴线为“轴对齐”约束参考,此时
按钮,分别选取图3.16.4中的两条轴线为“轴对齐”约束参考,此时 界面如图3.16.5所示。
界面如图3.16.5所示。
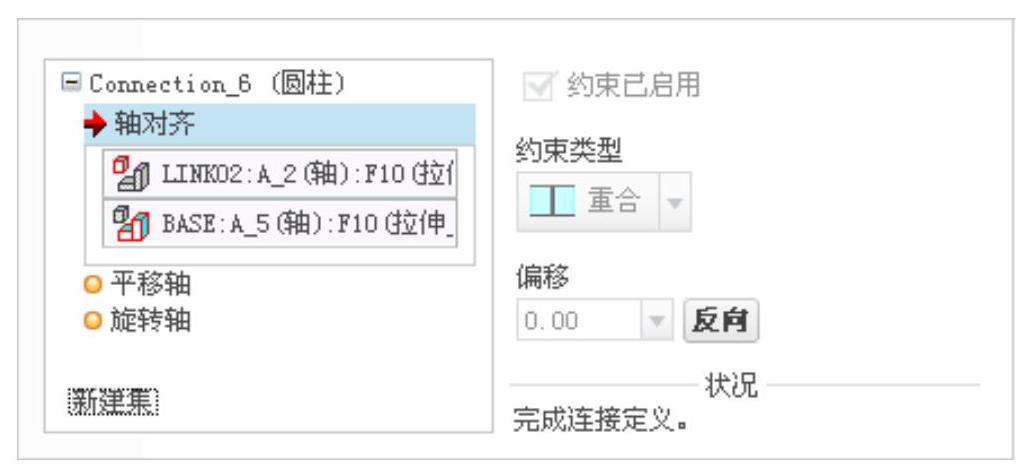
图3.16.5 “放置”界面
(3)拖动轴叉2至图3.16.4所示的大致位置。
Step9.创建两轴叉之间的万向(Gimbal)连接。(www.daowen.com)
(1)在 界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择
界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“坐标系对齐”约束。选取图3.16.6所示的两个坐标系为约束参考,此时 界面如图3.16.7所示。
界面如图3.16.7所示。
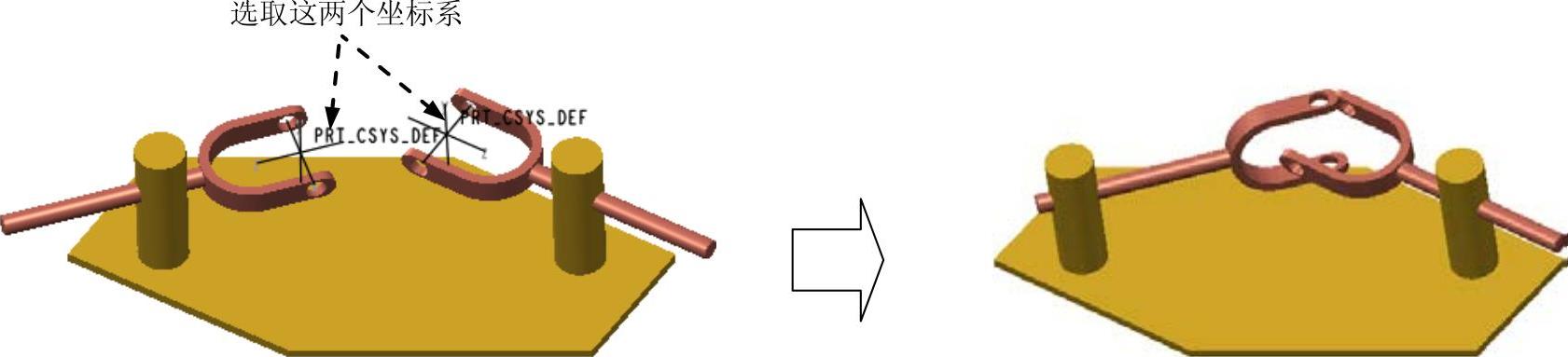
图3.16.6 创建万向(Gimbal)连接

图3.16.7 “放置”界面
(3)拖动轴叉2至图3.16.6所示的大致位置。
Step10.单击操控板中的 按钮,完成连接的创建。
按钮,完成连接的创建。
Step11.引入十字轴元件JOINT.PRT,并将其调整到图3.16.8所示的位置。
Step12.创建轴叉1(link01)与十字轴(joint)之间的圆柱连接3。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)定义“轴对齐”约束1。单击操控板中的 按钮,分别选取图3.16.8中的两条轴线为“轴对齐”约束1的参考,此时
按钮,分别选取图3.16.8中的两条轴线为“轴对齐”约束1的参考,此时 界面如图3.16.9所示。
界面如图3.16.9所示。
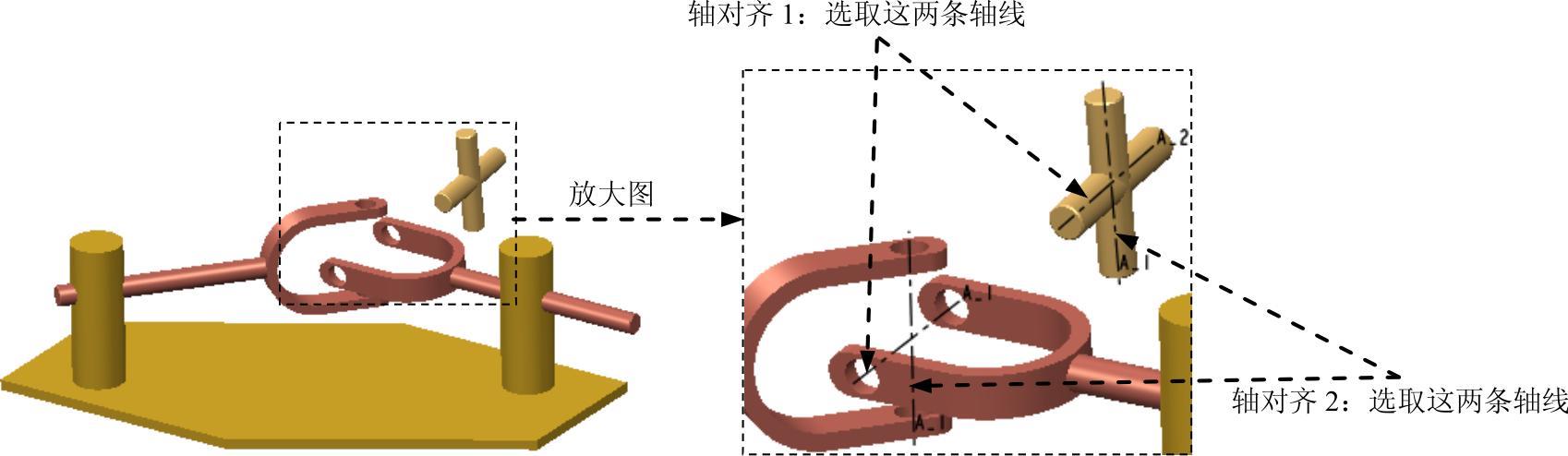
图3.16.8 创建圆柱(Cylinder)连接
Step13.创建轴叉2(link01)与十字轴(joint)之间的圆柱连接4。
(1)在 界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择
界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
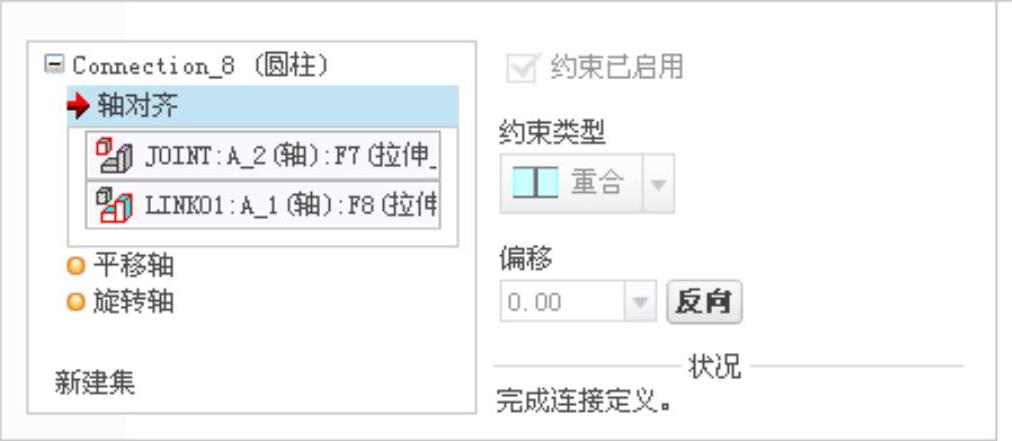
图3.16.9 “放置”界面
(2)定义“轴对齐”约束2。单击操控板中的 按钮,分别选取图3.16.8中的两条轴线为“轴对齐”约束2的参考,此时
按钮,分别选取图3.16.8中的两条轴线为“轴对齐”约束2的参考,此时 界面如图3.16.10所示。
界面如图3.16.10所示。
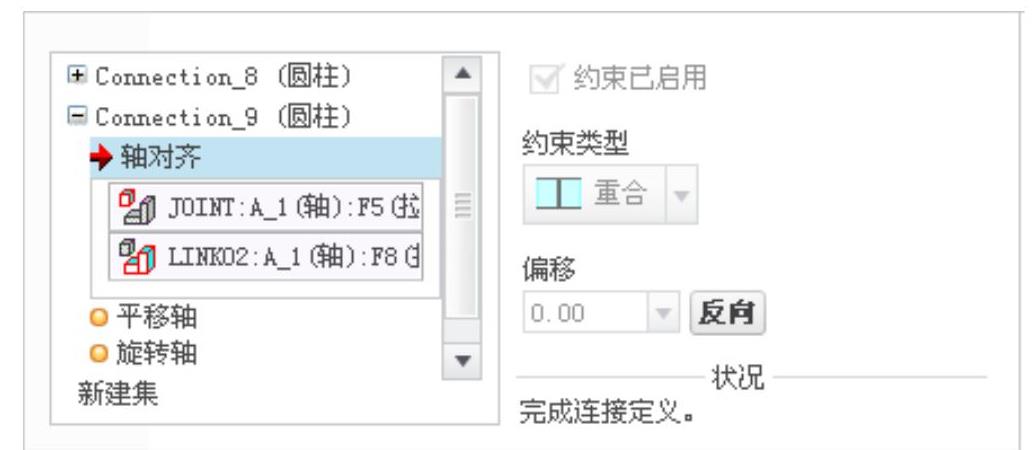
图3.16.10 “放置”界面
Step14.单击操控板中的 按钮,完成约束的创建,结果如图3.16.11所示。
按钮,完成约束的创建,结果如图3.16.11所示。

图3.16.11 机构装配结果
Step15.拖动验证。单击“拖动元件”按钮 ,尝试拖动轴叉1或轴叉2,验证连接。
,尝试拖动轴叉1或轴叉2,验证连接。
Step16.再生机构模型,然后保存机构模型。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





