【摘要】:单击功能选项卡区域中的“装配”按钮,打开名为rod_3.prt的零件。Step2.移动连杆2至合适位置。将其从图2.3.26中的位置1平移到图2.3.27中的位置2后再次单击左键。在“元件放置”操控板的机械连接约束列表中选择选项。图2.3.30 “放置”界面(二)Step4.创建连杆3和连杆2之间的“销”连接2。Step5.单击操控板中的按钮,完成“销”连接的创建与连杆3的放置,如图2.3.34所示。
Step1.引入连杆3。单击 功能选项卡
功能选项卡 区域中的“装配”按钮
区域中的“装配”按钮 ,打开名为rod_3.prt的零件。
,打开名为rod_3.prt的零件。
Step2.移动连杆2至合适位置。将其从图2.3.26中的位置1平移到图2.3.27中的位置2后再次单击左键。

图2.3.26 位置1图2.3.27位置2
Step3.创建连杆3和连杆1之间的“销(Pin)”连接1。
(1)在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)单击 按钮,选取图2.3.28中的两条轴线为
按钮,选取图2.3.28中的两条轴线为 约束参考,此时
约束参考,此时 界面如图2.3.29所示。
界面如图2.3.29所示。
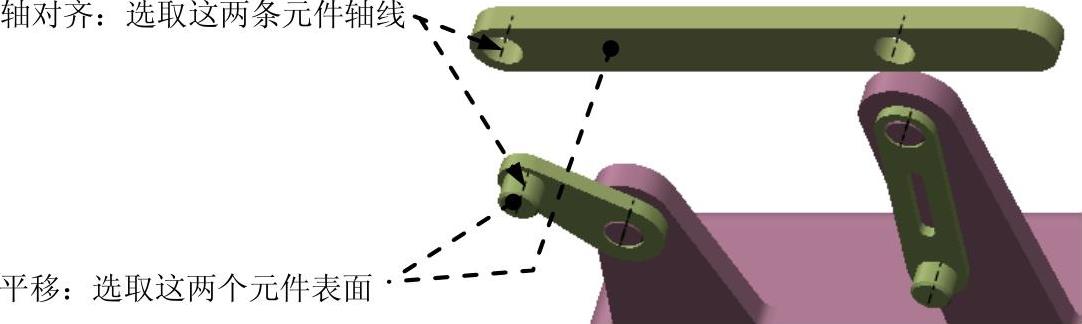
图2.3.28 创建“销(Pin)”连接1
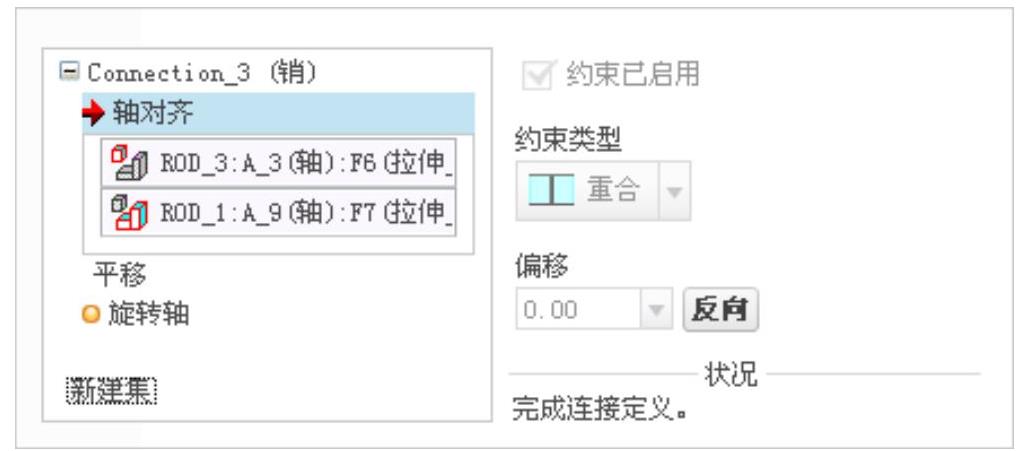
图2.3.29 “放置”界面(一)
(3)选取图2.3.28中的两个平面为 约束的参考,此时
约束的参考,此时 界面如图2.3.30所示。
界面如图2.3.30所示。
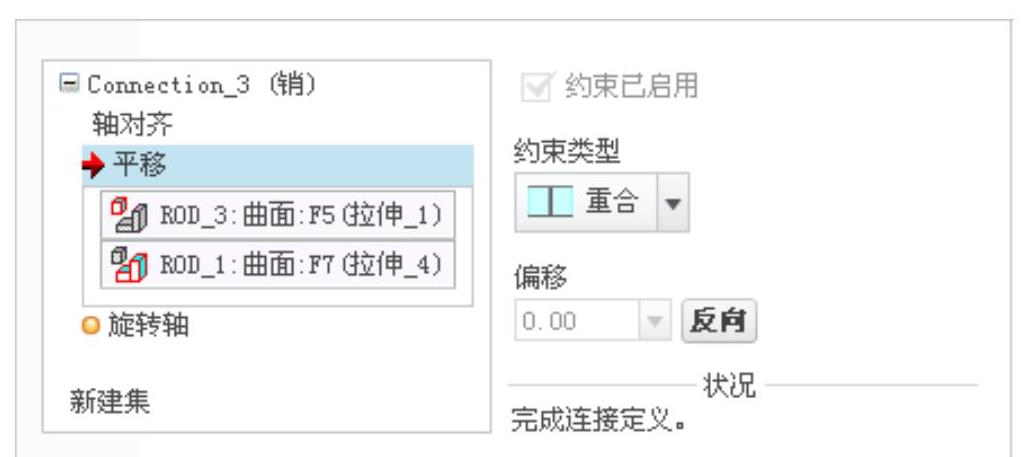
图2.3.30 “放置”界面(二)(www.daowen.com)
Step4.创建连杆3和连杆2之间的“销(Pin)”连接2。
(1)在 界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择
界面下方单击“新建集”字符,在“元件放置”操控板的机械连接约束列表中选择 选项。
选项。
(2)选取图2.3.31中的两条轴线为 约束参考,此时
约束参考,此时 界面如图2.3.32所示。
界面如图2.3.32所示。
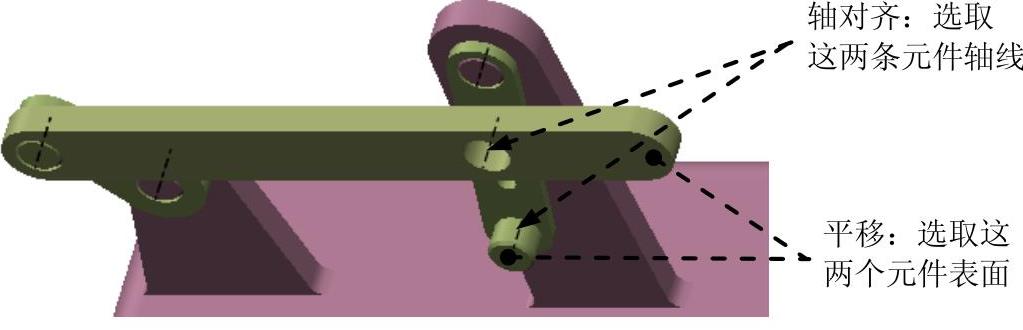
图2.3.31 创建“销(Pin)”连接2
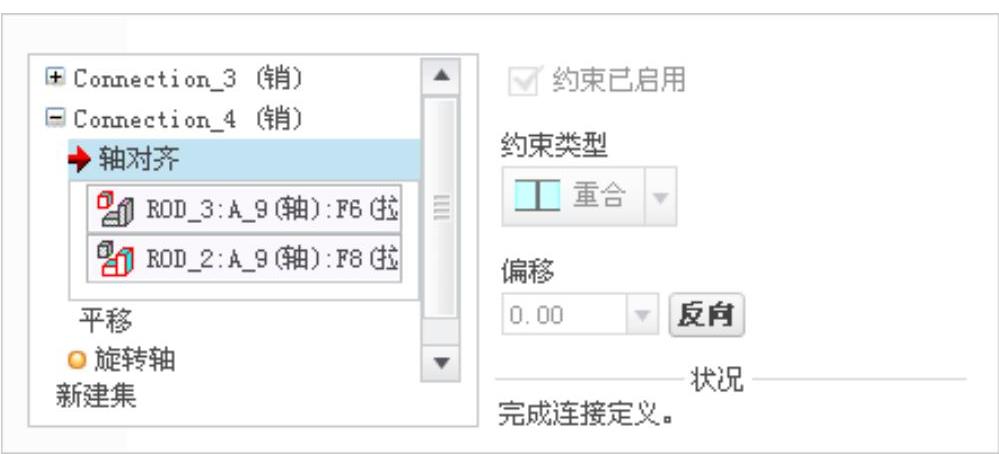
图2.3.32 “放置”界面(一)
(3)选取图2.3.31中的两个平面为 约束的参考,此时
约束的参考,此时 界面如图2.3.33所示。
界面如图2.3.33所示。
Step5.单击操控板中的 按钮,完成“销(Pin)”连接的创建与连杆3的放置,如图2.3.34所示。
按钮,完成“销(Pin)”连接的创建与连杆3的放置,如图2.3.34所示。
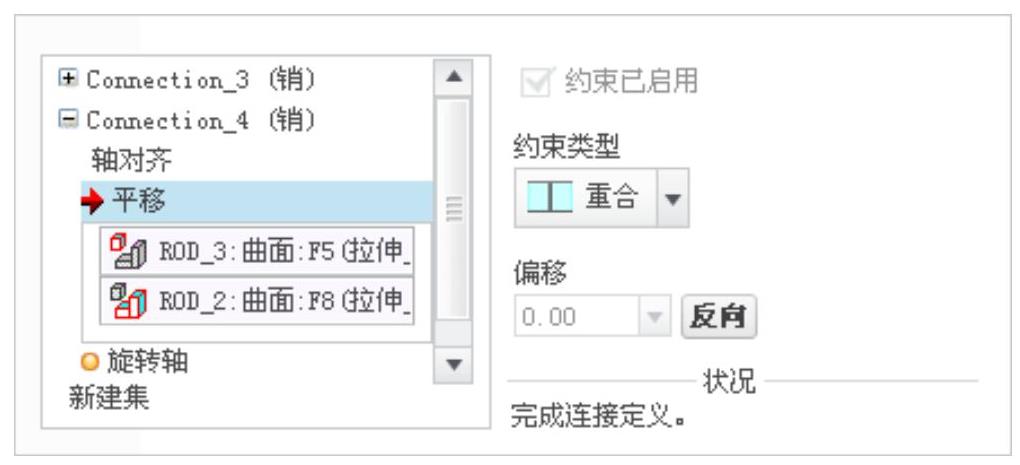
图2.3.33 “放置”界面(二)

图2.3.34 完成连杆3的放置
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。
有关Creo 4.0运动仿真与分析教程的文章






