MCR型动态无功补偿装置由3部分构成:FC滤波器、MCR磁控电抗器(包括MCR本体以及励磁系统)和控制保护系统。
FC滤波器用于提供系统所需要的容性无功功率、滤除负载及MCR系统本身所产生的少量谐波。MCR磁控电抗器用于平衡系统中由于负载的波动所产生的感性无功功率,并稳定负载冲击所产生的电压波动。控制保护系统负责对整个系统的无功功率控制提供指令并对整个系统提供相应的保护。控制保护系统在硬件上完全独立于控制系统,其与控制系统的连接通过I/O接口及串行通信形式来实现,因此具有高度的可靠性与独立性。保护的内容包括以下几个方面:
1)磁阀式可控电抗器保护系统:过电流、过负荷、过电压、轻瓦斯、重瓦斯、温度、压力、励磁单元故障。
2)滤波电容器组:过电流、电流速断、过电压、欠电压、电容器外熔丝保护、操作过电压保护、中性点不平衡电流保护、中性点避雷器过电压保护。
3)控制系统:控制器故障、通信故障、电源故障、频率保护。
MCR型动态无功补偿装置的系统组成框图如图5-5所示。
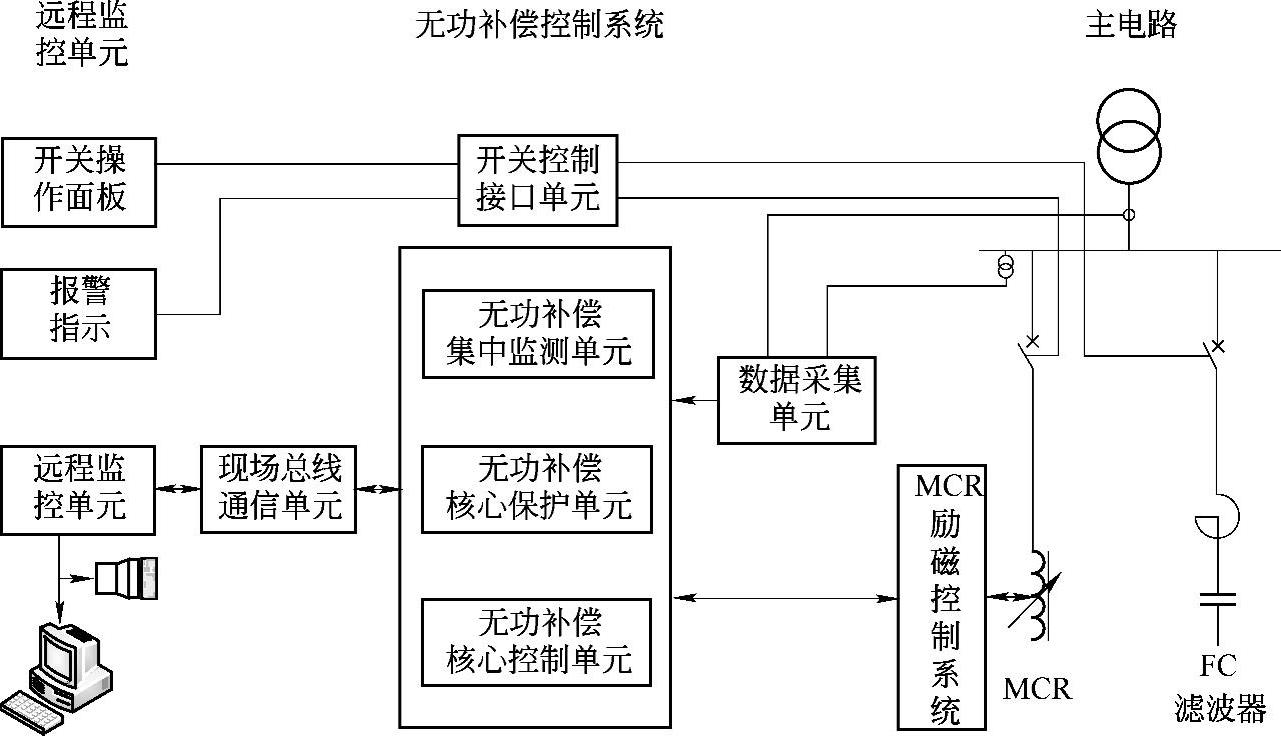
图5-5 MCR型动态无功补偿装置的系统组成框图
MCR型动态无功补偿装置具有如下的特点:
1)高度的可靠性,可以实现20年的基本免维护运行,大幅度降低维护、维修成本;(www.daowen.com)
2)快速响应能力,响应速度可以达到10ms;
3)调节范围大,达到50倍以上调节范围;
4)占地面积小,安装方便,设备采用油浸方式,室外安装,自然冷却;
5)谐波小,对电网无污染,对现有电容器组无任何不良影响,便于改造场合充分利用现有设备;
6)过载能力强,可实现100%过载30s,40%过载0.5h;
7)损耗小,大容量MCR的损耗小于其额定容量的0.5%;
8)过压能力强,限压能力好,具有天然的自动限压能力;
9)对环境及人体无电磁污染;
10)可采用斯坦梅茨方法,实现三相非对称负载的平衡化补偿。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






