异步电动机是通过磁场把定子的能量传递到转子的,因此任何由于定、转子间能量的失衡,使电动机从一种工作状态转变为另一种工作状态的过程,都是通过磁通的变化来实现的。
为了更清楚地反映定、转子间的能量传递过程,在图1-24中,将定、转子的等效电路分开了:左侧是一相定子绕组的等效电路;右侧是一相转子绕组的等效电路。今就异步电动机的几个平衡方程补充说明如下:
1.磁动势平衡方程 这是直接反映定、转子间能量平衡关系的重要方程,磁通大小的变化,归根结底是由磁动势平衡方程来决定的。
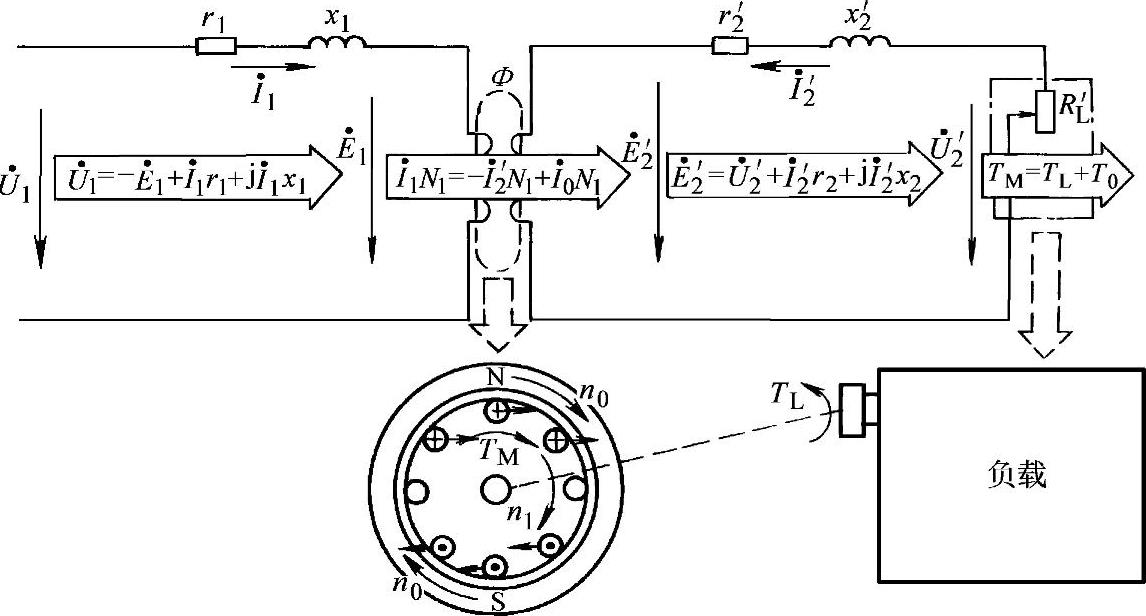
图1-24 异步电动机的能量传递过程
磁动势平衡方程的意义如下:
定子电流的磁动势是I1N1;转子电流的磁动势是I2N2(或I2′N1)。如1.5节所述,转子磁动势具有去磁效应。所以,定子磁动势I1N1的一部分用于克服转子磁动势I2N2的去磁效应,另一部分为励磁分量I0N1,用于建立磁通Φ:

在等效电路中,由于已经假设N2′=N1,因此,磁动势之间的平衡关系也可以简单地通过电流平衡方程来体现,如式(1-34)所示。(https://www.daowen.com)
2.定子侧的能量平衡 在定子侧,是电源电压U1克服反电动势E1建立磁场(具体体现为磁动势I1N1)的过程。所以,式(1-33)所示的电动势平衡方程实质上就是定子侧的能量平衡方程。在这里:
反电动势E1是定子绕组切割旋转磁场的磁力线的结果,其有效值的大小由下式计算:
E1=4.44kr1f1N1ΦM(1-37)式中kr1———与绕组结构有关的常数;
N1———每相定子绕组的匝数。
式(1-37)表明,在f1和N1都不变的情况下,反电动势E1与磁通成正比。所以,在频率一定的前提下,磁通的大小是通过反电动势E1来反映的。
3.转子侧的能量平衡 转子侧的能量是通过转子绕组切割旋转磁场得到的,其大小由转子电动势E2′来体现。转子侧的能量平衡有两个方面:
(1)电路方面 具体体现为式(1-35)所示的电动势平衡方程;
(2)机械方面 电动机的最终目的是要带动负载一起旋转而输出机械能的。因此,转子所产生的电磁转矩TM,用于克服负载的阻转矩TL和损耗转矩T0(如摩擦转矩、风阻转矩等)。当电动机的输出轴带动负载在某一转速n下等速运行时,电力拖动系统处于稳定运行状态,如1.1节所述。这时,电磁转矩TM和负载阻转矩TL及损耗转矩T0之间处于平衡状态,即式(1-1)所示的转矩平衡方程。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






