【摘要】:无约束优化问题的极值条件是指使得目标函数取得极小值时,极值点所应满足的条件。,xn)在x0点取得极值的必要条件为函数梯度极值的充分条件为函数海赛矩阵正定,即要求G的各项主子式均大于零。由于工程设计中,目标函数通常都比较复杂,海赛矩阵不易求得,它的正定性就更难判定了,所以一般说来,多元函数的极值条件在优化方法中仅具有理论意义。图2-8 函数的等值线图
无约束优化问题的极值条件是指使得目标函数取得极小值时,极值点所应满足的条件。对于可微一元函数f(x),在给定区间内某点x=x0处取得极值的必要条件是
f′(x0)=0
即函数的极值必须在驻点处取得,但是需要注意的是驻点未必都是函数的极值点。那么相类似的对于二元函数f(x1,x2),在点x0(x10,x20)处取得极值的必要条件是
即梯度  f(x0)=0
f(x0)=0
这个只是取得极值的必要条件,而要想建立极值的充分条件,则可以从二元函数的泰勒展开式进行推导证明,这里证明从略。
直接给出二元函数极值点的充分条件为:二元函数在该点处的海赛矩阵为正定,也就是要求海赛矩阵G(x0)的各阶主子式均大于零,即
根据二元函数在x0点取得极值的充分必要条件的推广,可以得到多元函数f(x1,x2,…,xn)在x0点取得极值的必要条件为函数梯度

极值的充分条件为函数海赛矩阵
 (https://www.daowen.com)
(https://www.daowen.com)
正定,即要求G(x0)的各项主子式均大于零。由于工程设计中,目标函数通常都比较复杂,海赛矩阵不易求得,它的正定性就更难判定了,所以一般说来,多元函数的极值条件在优化方法中仅具有理论意义。
例2-3 求下面函数的最优解
解:按最优解的必要条件
根据上面方程组可以求得,x2∗=4,x1∗=1000为满足必要条件的点。
再根据上面的方程组可以求得f(X)的海赛矩阵
由于x1、x2均大于零,其海赛矩阵为正定矩阵。因此X∗=(1000 4)T是f(X)函数的局部极小点,由于海赛矩阵对于一切x1>0和x2>0均为正定,函数f(X)是凸函数,所以X∗也是全域最小点,其f(X)函数的等值线图如图2-8所示。
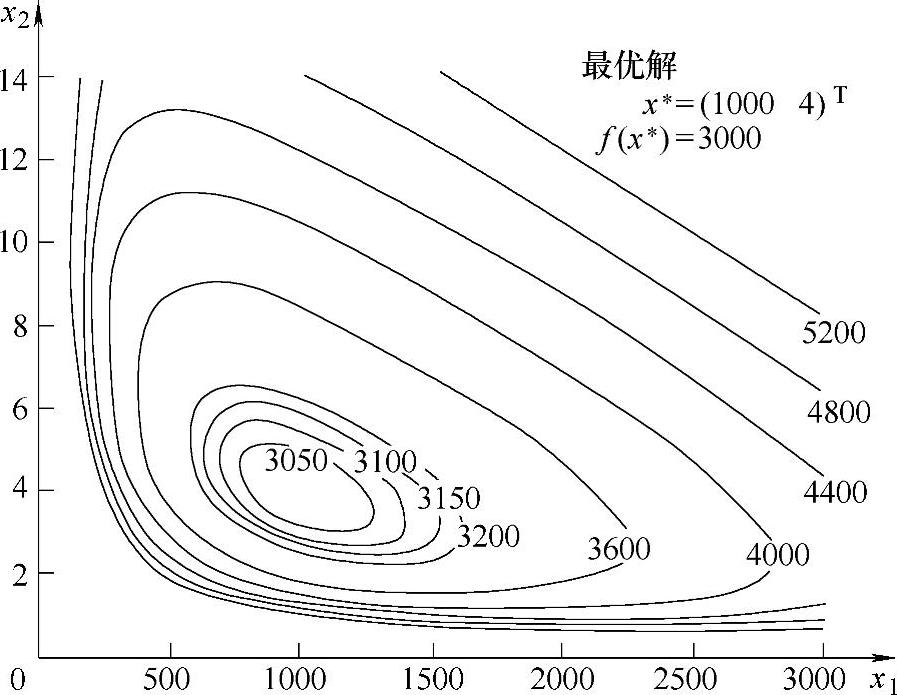
图2-8 函数的等值线图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





