实验采用ABB工业机器人和立体视觉传感器,组建柔性视觉坐标测量系统,并验证测量系统的测量精度及其重复性评价。机器人按照两条标定时路径运行各5次,评价测量系统的重复性。然后改变测量靶标位置,同时采用该测量系统和经纬仪进行测量,验证测量系统的测量精度。测量结果如表1、2和3所示。
表1 机器人按路径1运动测量结果 Tab.1 Experiment results when robot moves at path 1
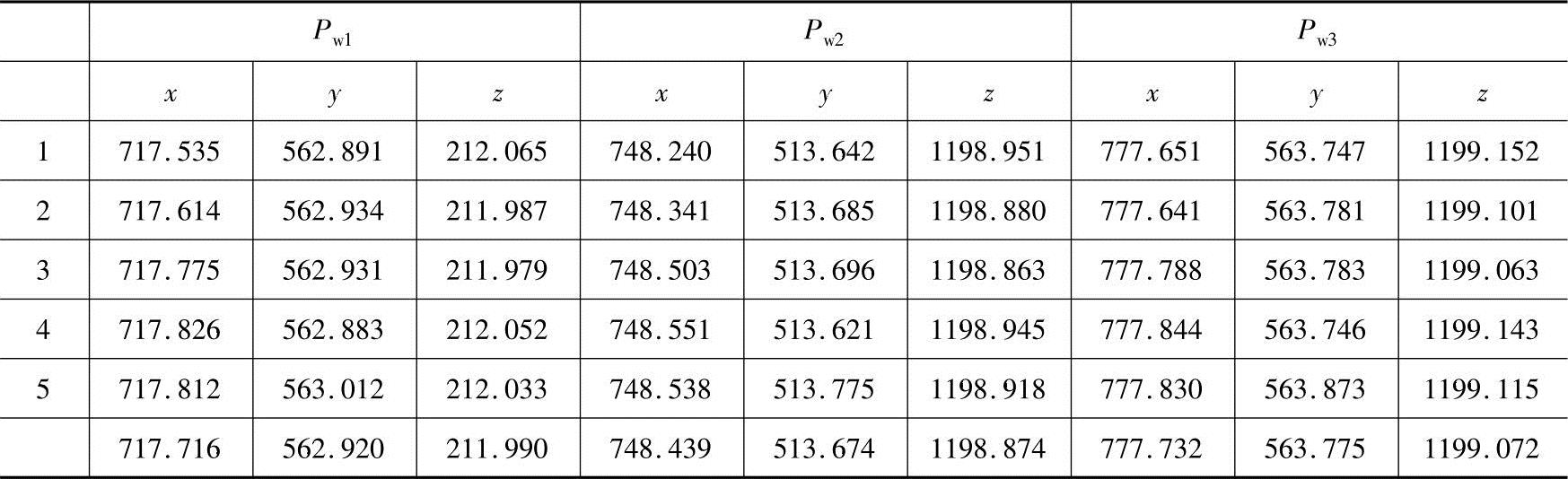
由表1、2可以看出,在标定位置处,测量系统的测量结果和经纬仪测量结果相差±0.3mm左右。在未标定处,经过多次试验证明两种结果相差为±1mm以内。但从第3组结果可以看出,机器人测量系统本身测量结果变化在±0.3mm内。也就是说,机器人柔性坐标测量系统的重复测量误差约为±0.3mm。
表2 机器人按路径2运动测量结果 Tab.2 Experiment results when robot moves at path 2
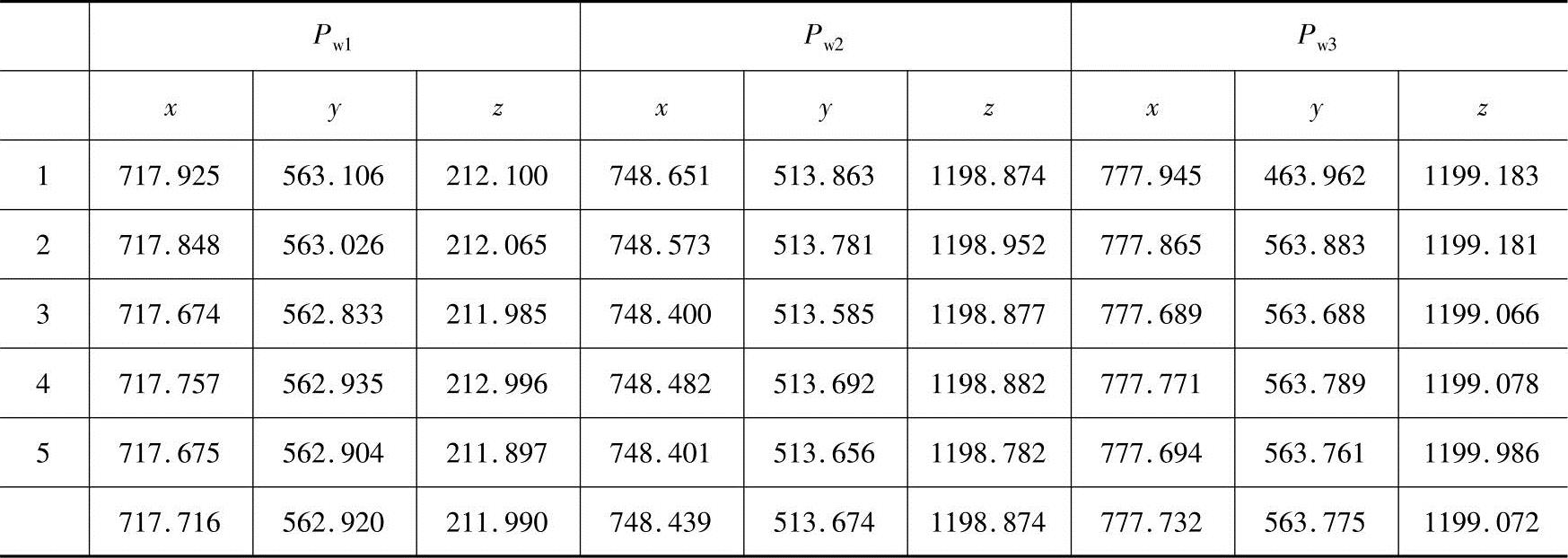
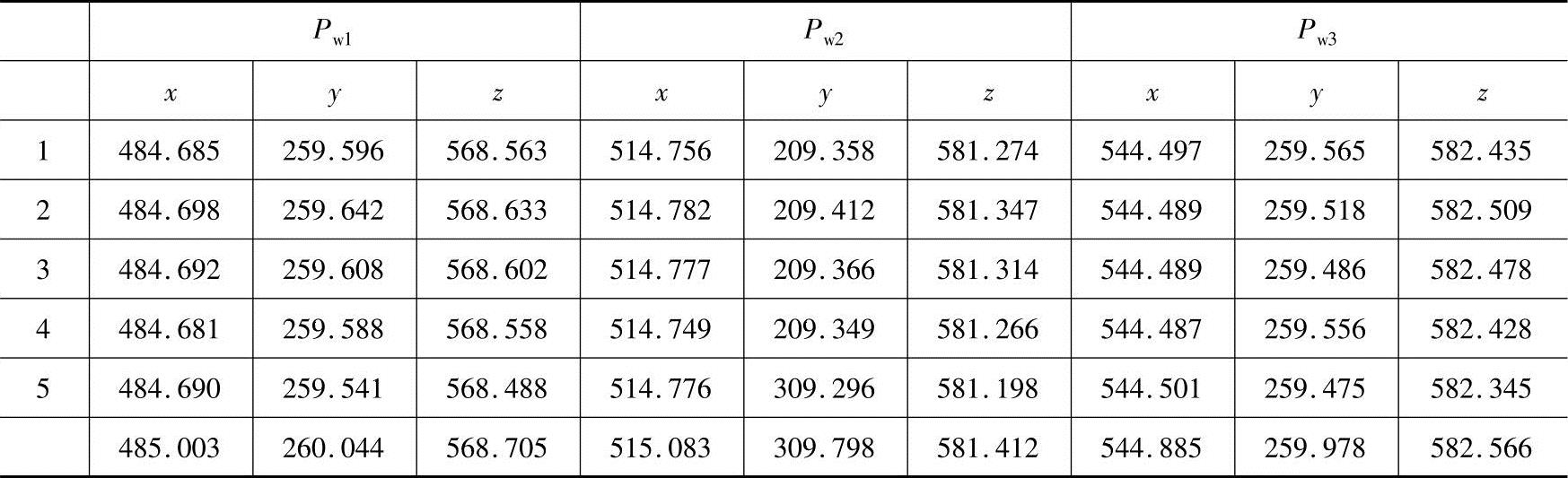
表3 机器人按其他路径运动测量结果 Tab.3 Experiment results when robot moves at other path(https://www.daowen.com)
重复测量误差是由机器人手臂的重复定位误差和视觉传感器的重复测量误差造成的,要减小这种误差,必须减小机器人本身的重复定位误差。
在非标定处,测量精度为±1mm,这种误差主要由机器人的正向运动模型的误差造成的。要消除这种误差,必须对机器人的运动模型进行更为精确的标定。
机器人柔性坐标测量系统在使用中更适合作为质量监控系统,充分利用重复测量误差较小的优点,对被测件尺寸变化进行监控;如果作为测量设备,应在每一个测量点处都进行标定,而不采用机器人的正向运动模型,以提高测量精度。
作者简介:刘常杰(1973—),男,汉族,山东人,副教授,主要从事视觉检测技术研究。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





