【摘要】:图2 分步法标定示意图 Fig.2 Two-step calibration这里,标定的目的是为了求取机器人的手眼关系X和机器人基坐标系和白车身坐标系之间的位姿关系Z。如果直接根据式求取X和Z,同时存在两个坐标转换关系,初始值必须比较准确,计算才可能收敛。则存在姿态1为Z-1×Pwt1=B1×X×Pc1 姿态2为Z-1×Pwt2=B2×X×Pc2 式中,Pwt1和Pwt2为同一个控制点在车身坐标系下的坐标。
目前,对摄像机和视觉传感器的标定进行了大量的研究[2~6],并建立了多种成熟的算法,这里不再进行详细描述。
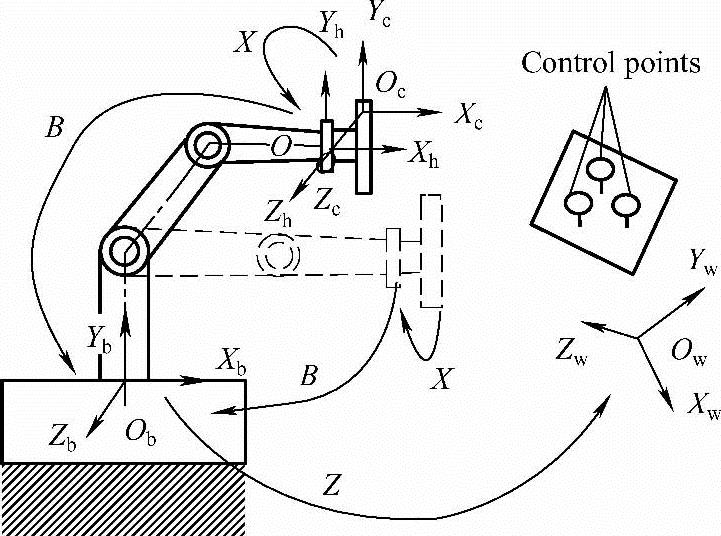
图2 分步法标定示意图 Fig.2 Two-step calibration
这里,标定的目的是为了求取机器人的手眼关系X和机器人基坐标系和白车身坐标系之间的位姿关系Z。如果直接根据式(1)求取X和Z,同时存在两个坐标转换关系,初始值必须比较准确,计算才可能收敛。这种方法实现比较困难,所以本文采用分步求取的方法。
如果控制点(标定时靶标上的点)位置不动,机器人以不同的两种路径运动,视觉传感器以两种不同的姿态测量控制点,如图2所示。则存在姿态1为
Z-1×Pwt1=B1×X×Pc1 (2)
姿态2为(https://www.daowen.com)
Z-1×Pwt2=B2×X×Pc2 (3)
式中,Pwt1和Pwt2为同一个控制点在车身坐标系下的坐标。由于靶标上控制点在两次测量中是不动的,即Pwt1=Pwt2,因此
B1×X×Pc1=B2×X×Pc2 (4)
式中,B1和B2根据机器人的运动模型是已知的;Pc1和Pc2是视觉传感器的测量结果。显然,如果控制点数大于3个,且控制点不在同一条直线上,X就可以计算出。
X计算出后,根据式(1),可计算出Z。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







