柔性在线白车身坐标测量系统由相对独立的两部分组成,多自由度的工业机器人和安装在机器人末端关节的立体视觉传感器。测量过程为:当机器人接收到开始测量信号后,就按预先规划的测量路径带动视觉传感器运动,依次使被测点进入到传感器的测量区域内,由视觉传感器和测量主机完成测量。测量结束后,机器人回到初始状态,并发送测量完毕信号。系统工作原理示意图如图1所示。
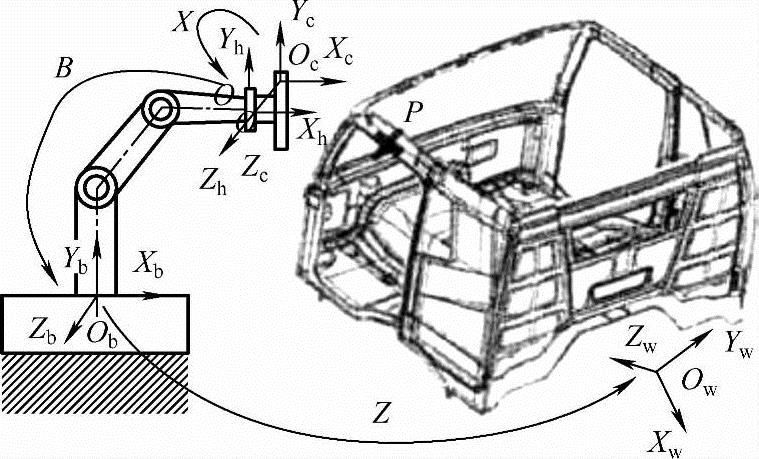
图1 机器人柔性白车身坐标测量系统图 Fig.1 Flexible measurement system based on robot for BIW
系统中存在4个坐标系。其中,与机器人相关的两个坐标系,安装机器人时确定的基坐标系统ObXbYbZb和机器人末端关节坐标系OhXhYhZh,车身在生产线上由定位系统确定的车身坐标系OwXwYxZw和视觉传感器测量坐标系OcXcYcZc。测量的结果即确定被测点P在车身坐标系OwXwYwZw下的坐标Pwt。从图1可以看出
Pwt=Z×B×X×Pc (1)(https://www.daowen.com)
式中,Pc为被测点P在视觉传感器测量坐标系下的坐标值;X为机器人手眼关系,即机器人末端关节坐标系与视觉传感器测量坐标系之间的变换关系;B为机器人末端关节坐标系与机器人基坐标系之间的坐标变换关系,它可以由机器人的正向运动学模型及各个关节变量值获得;Z为机器人基坐标系与白车身坐标系之间的位置变换关系。
式(1)中,X和Z为未知值。由于视觉传感器与机器人末端关节刚性连接,测量过程中两者相对位置不变,所以X在测量中恒定。同样,机器人基坐标系相对于白车身坐标系的位置关系也是不变的,即Z值恒定。因此,通过标定可以将这两个关系在测量前计算出。
通过以上分析,只要得到P点在视觉传感器测量坐标系下的坐标Pc,根据式(1),可计算出P点在车身坐标系下的坐标Pwt。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






