栅格地图最早是由Elfes和Moravec提出的,后来被扩展了,分为2D栅格地图和3D栅格地图。它们的共同点是都将整个环境分割成均匀的单元栅格;不同的是2D栅格地图每个栅格只有两种状态:1或0,而3D栅格地图每个单格的值代表这个格子的高度信息,从而更精细地表示整个环境地形。对于栅格地图,环境空间的分辨率与栅格尺寸的大小有关,要想增加分辨率,就要减小栅格的尺寸,同时也将增加运算的时间和空间复杂度,所以在实际应用时要权衡车辆导航需要和系统运算能力来合理选择栅格尺寸。
将解包后的每一帧数据(大约有13万个点)投影到栅格地图上,再进行相关处理,从而得到障碍物信息。其具体流程如图8-12所示。

图8-12 障碍物检测流程图
1.栅格投影
建立M×N的栅格地图,栅格大小是G。在此我们定义一帧为激光雷达旋转一周内所获得的点云数据。将三维点投影到(x,y)栅格平面上,为了方便统一计算三维点所落入栅格的位置,需要将整体的x-y坐标值都转化为正值,因此需要在x-y坐标值上增加平移量(mapx,mapy)。栅格转化公式如下所示:
Row=(y+mapy)/G
Col=(x+mapx)/G
栅格障碍检测方法是用一个格子来表示格子中的三维点,在后续的目标分类中就难以充分利用原始三维点云信息,因此需要在栅格化的同时记录下每个落入的三维点云坐标和强度信息。图8-13所示为障碍栅格地图哈希映射3D点云,这种哈希的结合方法可以高效率地建立由栅格障碍点到三维点的映射关系,以便在后续车辆检测和行人检测中可以利用栅格中的3D点云信息来提取障碍物的特征。其具体流程图如图8-14所示。
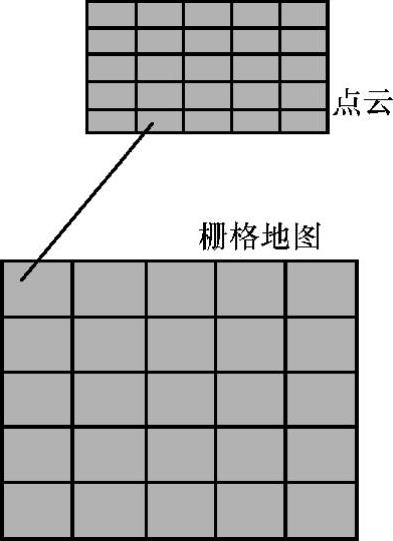
图8-13 障碍栅格地图哈希映射3D点云
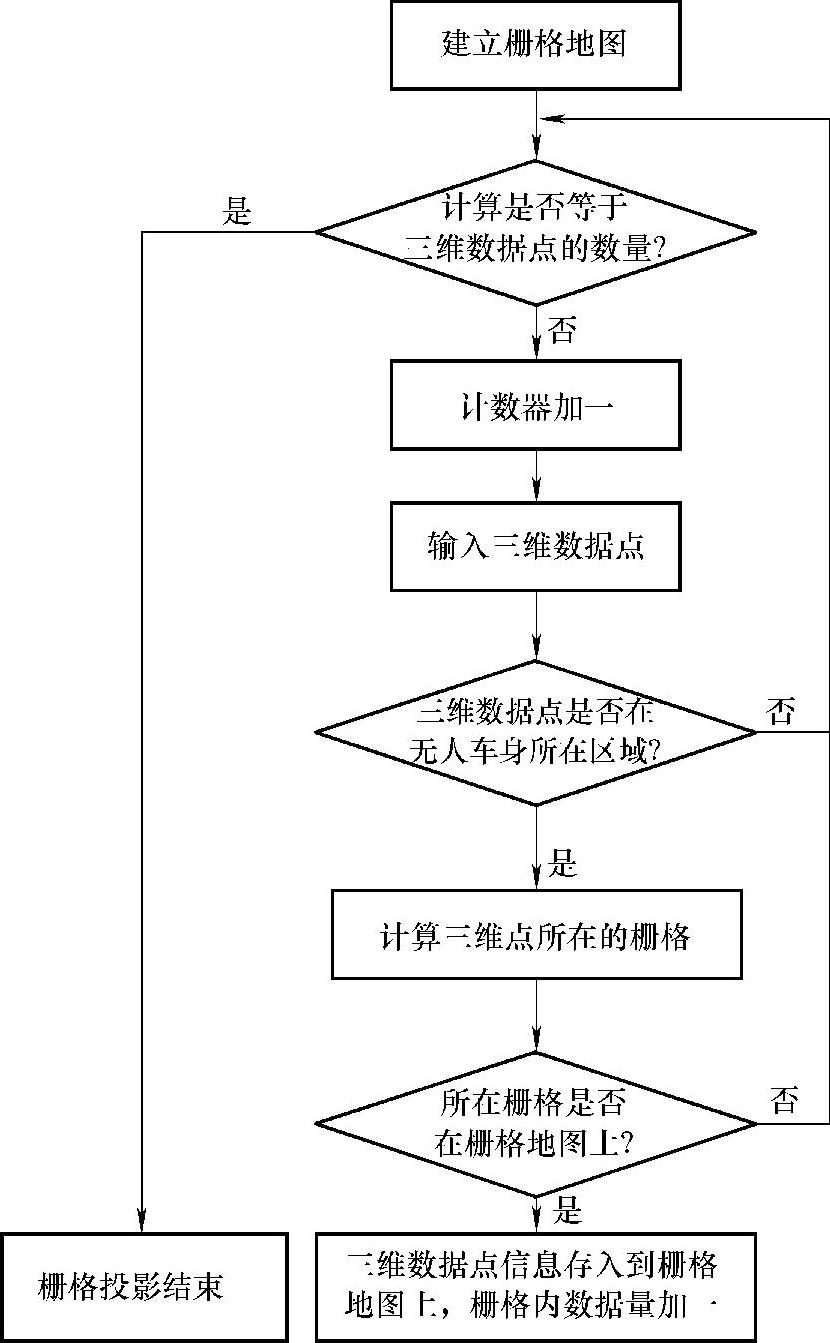
图8-14 栅格投影流程图
2.栅格处理
经过投影之后,地图上每个栅格包含三维点个数、最大高度、最小高度等信息。数据处理时遍历每个栅格,判断该栅格的属性。属性分为可通行、不可通行和未知区域三类。其中可通行属性是平坦地面、坡面等,不可通行属性指一般影响智能车安全行驶的障碍物,未知区域属性表示雷达检测盲点。(www.daowen.com)
车辆在非结构化道路上行驶时,智能车会发生颠簸,影响俯仰角,导致障碍物的高度产生测量误差。另一方面,智能车前方如遇到一个大的上坡路段,虽然雷达能够测量到有一定高度的物体,但实际上这是可以通行的。故本系统采用相对高度的概念来判断栅格是否为障碍物,这样一方面减小车辆颠簸带来的影响,另一方面不会将小石块或坡面判定为障碍物。其具体流程如图8-15所示。
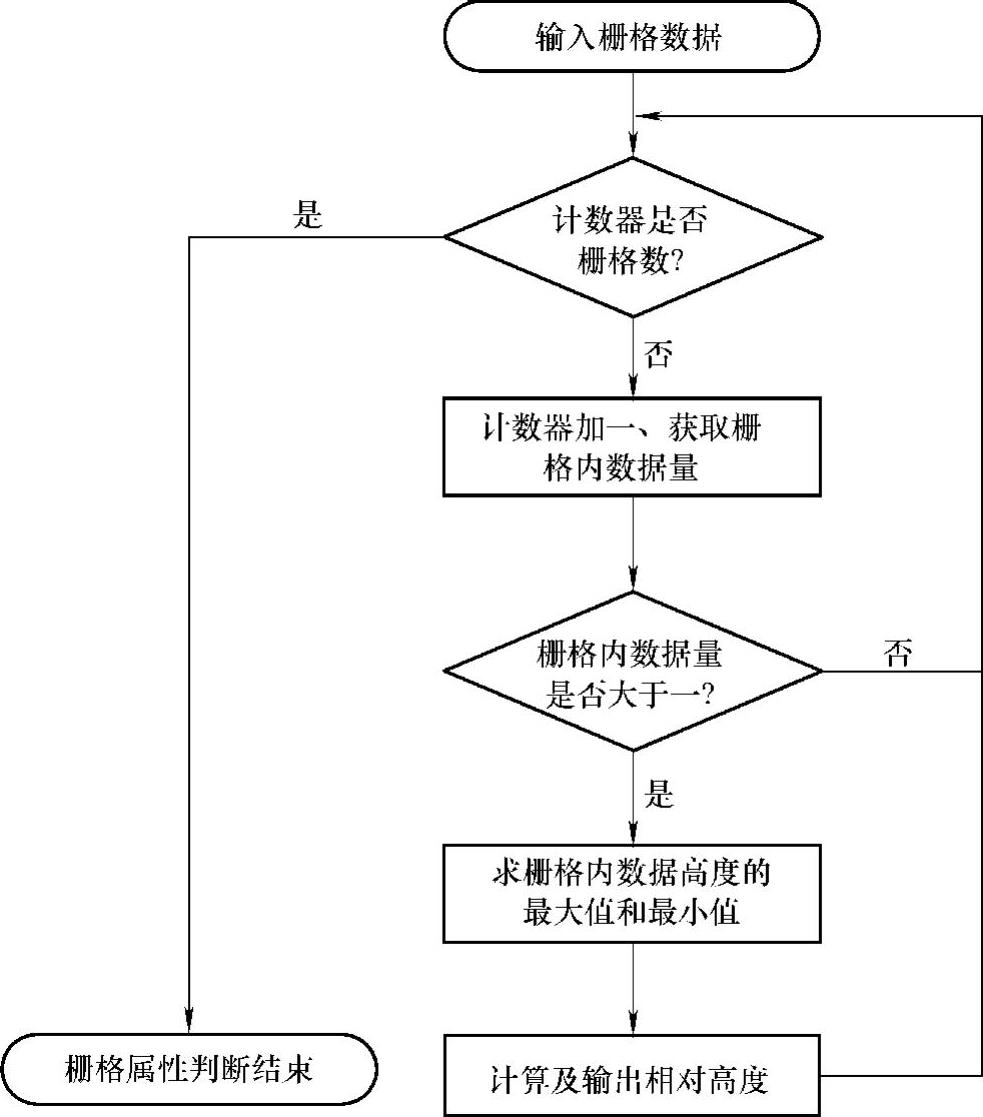
图8-15 栅格处理流程图
在实验过程中,偶尔会遇到少数雷达错误反射点,而这些错误点往往是单点孤立存在的;还有一些是悬空小障碍,如悬挂的树枝、小飞虫等,也会引入一些障碍误检。在智能车路径规划中,若是碰到这些误检点就会使智能车紧急制动,造成智能车无法通过的假象。
因此在实际智能车系统中能够提供可靠稳定的障碍信息是非常重要的,在障碍栅格地图输出之前必须要进行悬空点滤除和单点滤除,可以有效抑制传感器噪声和
环境噪声干扰。
(1)悬空点滤除
统计落在网格内的雷达三维点(x,y,z),对于最低高度超过2m的障碍点,如果少于两条雷达线扫描到,便被视为悬空点,如图8-16所示。
(2)单点障碍滤除
在近处小于20m的范围内,由于三维激光雷达数据是致密的,障碍点一般都是成堆出现的。若是在一个以障碍物网格为中心的7×7范围内没有其他障碍网格,只有点单点障碍,并且如果少于2条雷达线扫描到,则被视为单点噪声。单点滤除领域示意图见图8-17。
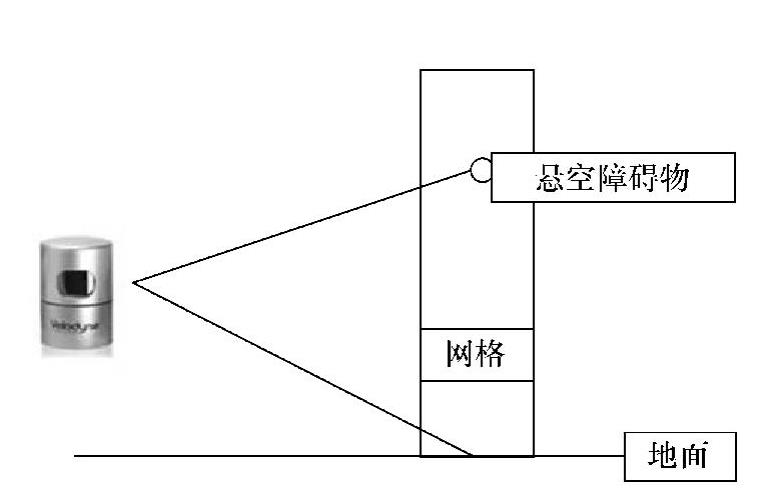
图8-16 悬空点示意图
图8-17 单点滤除示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





