三维激光雷达的数据是以UDP广播包的方式接收的,并通过解包从而获得所需要的点云数据。其流程图如图8-8所示。
1.UDP协议
三维激光雷达的数据是以UDP广播包的方式接收的。UDP协议为非面向连接的协议,数据的发送与接收并不需要像TCP/IP协议那样事先建立连接,其次UDP以数据包的形式接收数据,因此其速度远高于TCP/IP。雷达接收数据具体原理如图8-9所示。
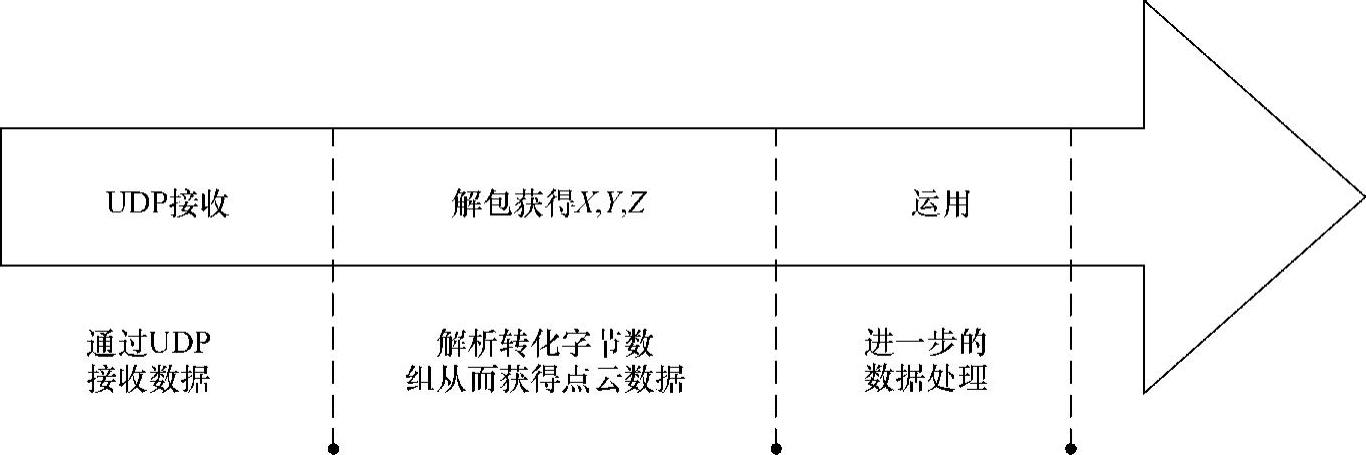
图8-8 点云数据获取流程图

图8-9 雷达接收数据原理图
2.数据解包
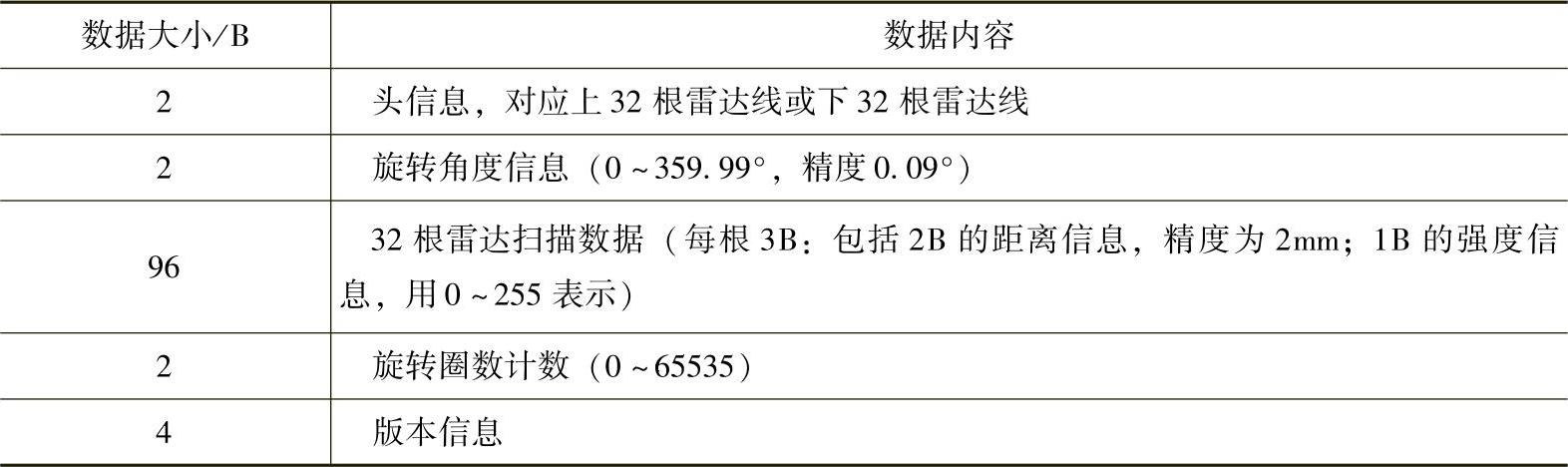
三维激光雷达的数据是在局域网络内以UDP广播包的方式发送的。激光雷达数据包的格式:每个数据包的大小为1206B,该数据包包含12个100B的数据块,以及最后6B的其他信息。激光雷达UDP数据包的信息见表8-3。
表8-3 激光雷达UDP数据包信息
3.坐标系统和坐标系变换
建立坐标系统和坐标系变换是建立栅格地图的基础。因为激光雷达固有的复杂的几何模型以及激光雷达在车体上安装有一定的灵活性,所以利用车载激光雷达数据建立栅格地图往往要建立复杂的坐标系统,并且要完成程距数据在坐标系之间的转换。
在构建栅格地图的过程中共用到三个直角坐标系和一个极坐标系,其中三个直角坐标系都是右手坐标系。
 地面坐标系OXYZ。地面坐标系又称世界坐标系,是相对固定的坐标系,全局的栅格地图是在地面坐标系里建立的。定义坐标系原点O为地表面上的某一个初始点,X为地理东方,Y为地理北方,Z垂直水平面向上。
地面坐标系OXYZ。地面坐标系又称世界坐标系,是相对固定的坐标系,全局的栅格地图是在地面坐标系里建立的。定义坐标系原点O为地表面上的某一个初始点,X为地理东方,Y为地理北方,Z垂直水平面向上。
 车体坐标系OcXcYcZc。车体坐标系随车一起运动。定义坐标系原点Oc为车体上的某个固定点,Xc为车正前方,Yc为车左方,Zc为车上方。
车体坐标系OcXcYcZc。车体坐标系随车一起运动。定义坐标系原点Oc为车体上的某个固定点,Xc为车正前方,Yc为车左方,Zc为车上方。
 雷达直角坐标系OrXrYrZr。雷达直角坐标系与雷达固连,定义坐标系原点Or为雷达上的某个初始点,Xr为雷达主轴线方向,Yr为雷达左方,Zr为雷达上方。
雷达直角坐标系OrXrYrZr。雷达直角坐标系与雷达固连,定义坐标系原点Or为雷达上的某个初始点,Xr为雷达主轴线方向,Yr为雷达左方,Zr为雷达上方。
 雷达极坐标系(ρ,θ)。雷达极坐标系并不是雷达直角坐标系的简单极坐标化的结果。雷达极坐标系与程距数据相对应,因为在不同的扫描线上就有不同的俯角,所以与雷达直角坐标系之间就有不同的转换结果。极坐标原点与雷达直角坐标系原点Or重合,如果忽略同一条扫描线在不同扫描角度上不共面的问题,则极轴可以近似地理解为扫描线在0°扫描角的方向。
雷达极坐标系(ρ,θ)。雷达极坐标系并不是雷达直角坐标系的简单极坐标化的结果。雷达极坐标系与程距数据相对应,因为在不同的扫描线上就有不同的俯角,所以与雷达直角坐标系之间就有不同的转换结果。极坐标原点与雷达直角坐标系原点Or重合,如果忽略同一条扫描线在不同扫描角度上不共面的问题,则极轴可以近似地理解为扫描线在0°扫描角的方向。
激光雷达的原始程距数据是在激光雷达极坐标系下获得的,而越野环境下的栅格地图则需要在地面坐标系中建立,多帧的程距数据只能在地面坐标系才能达到统一。根据需要,坐标系变换应该包括雷达极坐标系到雷达直角坐标系、雷达直角坐标系到车体坐标系和车体坐标系到地面坐标系的变换。
(1)雷达极坐标系到雷达直角坐标系的变换
雷达极坐标系到雷达直角坐标系的变换要借助于激光雷达的几何模型来进行,雷达极坐标系中坐标为(ρ,θ)的扫描点在雷达直角坐标系中的坐标为
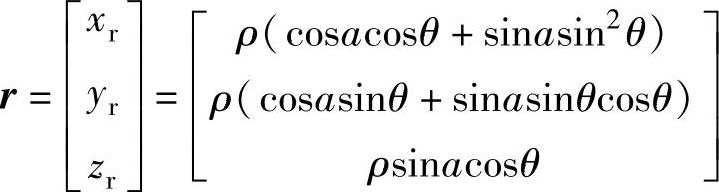
式中,a是四扫描线校正角,
(2)雷达直角坐标系到车体坐标系的变换(https://www.daowen.com)
雷达直角坐标系到车体坐标系的变换需要经过一次绕y轴的反旋转和一次平移操作,变换公式如下:

式中,Ry是旋转矩阵;Ry(-a0)表示绕y轴顺时针旋转a0。
(3)车体坐标系到地面坐标系的变换
越野环境下车体颠簸得比较厉害,车在行驶过程中相对于地面坐标系存在着偏航角、俯仰角和倾斜角,在三个自由度上都需要进行变换。总的变换过程需要经过三次旋转和一次平移,如图8-10所示。
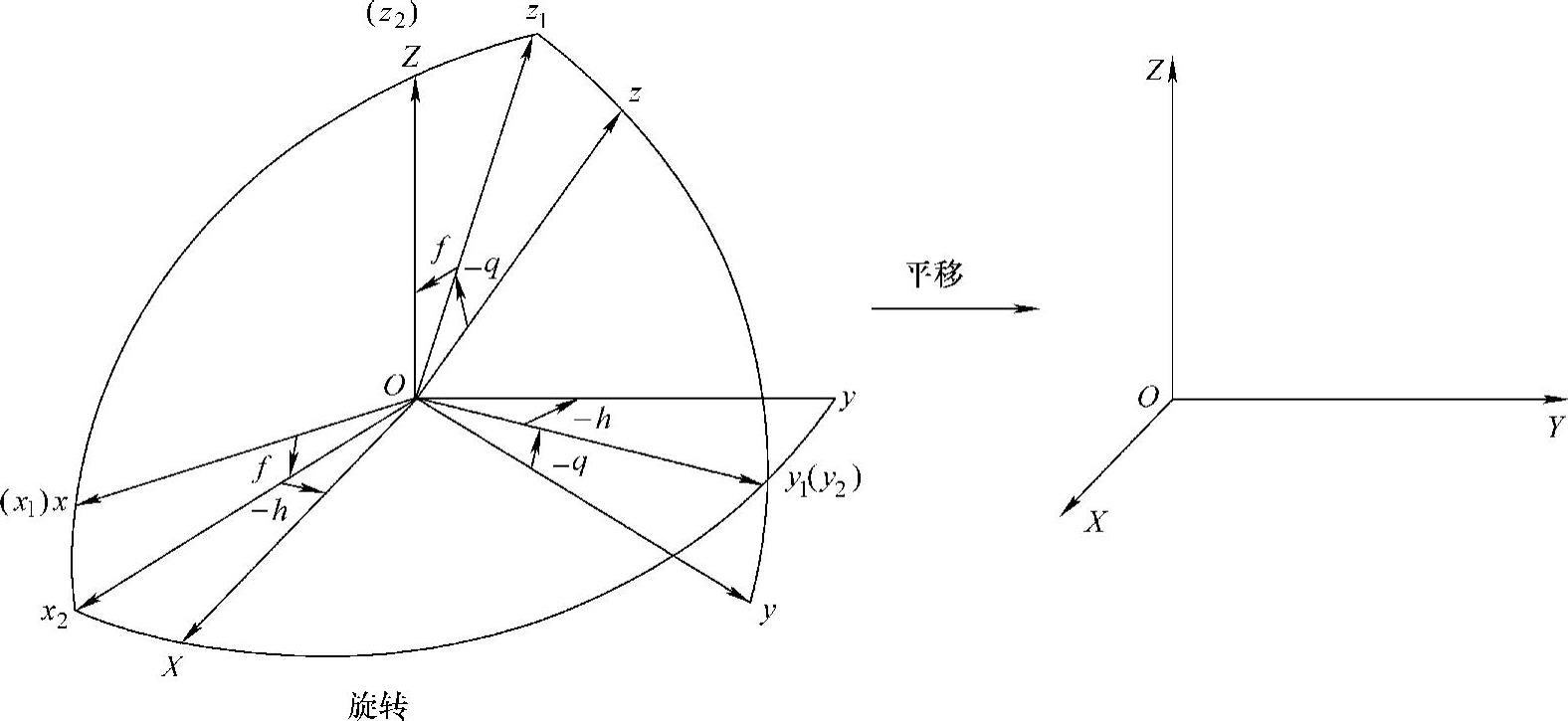
图8-10 车体坐标系到地面坐标系的变换过程
引入欧拉角和旋转矩阵:偏航角h,左偏为正;俯仰角f,仰角为正;倾斜角q,右倾为正。

旋转顺序:
则变换公式为:C=R·c+O
式中,
O是车体坐标与地面坐标相对平移量。
处理器从局域网络上获得这些数据包后,就需要将其进行转换,即从距离、角度信息,通过内外参的标定数据转换到车体坐标系。根据内参标定得到的文件,进行距离、角度信息的误差校正,其中包括旋转校正角度、垂直校正角度、距离校正角度、垂直偏移因子以及水平偏移因子等。在得到相对较为准确的距离角度信息后,通过下列公式将其转化为雷达坐标系下的三维位置点(x,y,z)1:
x=ρcosαcosθ
y=ρcosαsinθ
z=ρsinα
式中,ρ为三维点距离雷达的距离;α为该点所在的雷达线的俯仰角,即垂直方向的角度;θ为水平方向的航向角。
最后通过外参标定得到的旋转矩阵R和平移矩阵T将每个三维点转化为车体坐标系下的位置点(x,y,z)v。
其具体实现流程如图8-11所示。
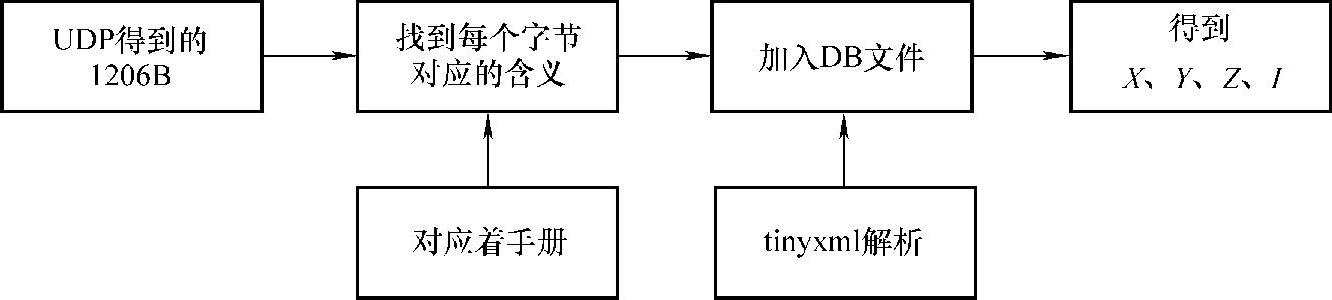
图8-11 数据解包流程图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






