【摘要】:目前,在智能车上安装的雷达种类繁多,主要有单线激光雷达、多线激光雷达及三维激光雷达等。因此,三维激光雷达的引入,可以真正满足无人驾驶智能车对环境理解和地图构建的要求,具有典型代表性的三维激光雷达为美国Velodyne公司生产的64线激光雷达和32线激光雷达。64线激光雷达传感器探测范围:水平视场360°,垂直视场26.8°。
目前,在智能车上安装的雷达种类繁多,主要有单线激光雷达、多线激光雷达及三维激光雷达等。它们可实现多种功能:障碍物检测、道路检测、目标跟踪等。单线或多线激光雷达只能完成相对简单的功能,如测试距离、障碍物检测等,而利用它们进行更复杂的三维建模、地图构建等功能比较困难。因此,三维激光雷达的引入,可以真正满足无人驾驶智能车对环境理解和地图构建的要求,具有典型代表性的三维激光雷达为美国Velodyne公司生产的64线激光雷达和32线激光雷达。其传感器如图8-5和图8-6所示。该激光雷达采用电动机旋转的方式来釆集数据,用来探测周围360°范围内的障碍物情况。如表8-2和图8-7所示,以64线激光雷达为例,64线激光雷达由上下两组各32条扫描线组成,并且上下各有一个激光接收器镜面,每条扫描线有其固定的俯仰角。64线激光雷达传感器探测范围:水平视场360°,垂直视场26.8°。探测距离:根据不同的激光反射率,探测距离不同,50m(对路面反射率约0.1),120m(对汽车和植物反射率约0.8);角度分辨率:0.09°;距离精度:1.5cm。

图8-564 线激光雷达

图8-632 线激光雷达(www.daowen.com)
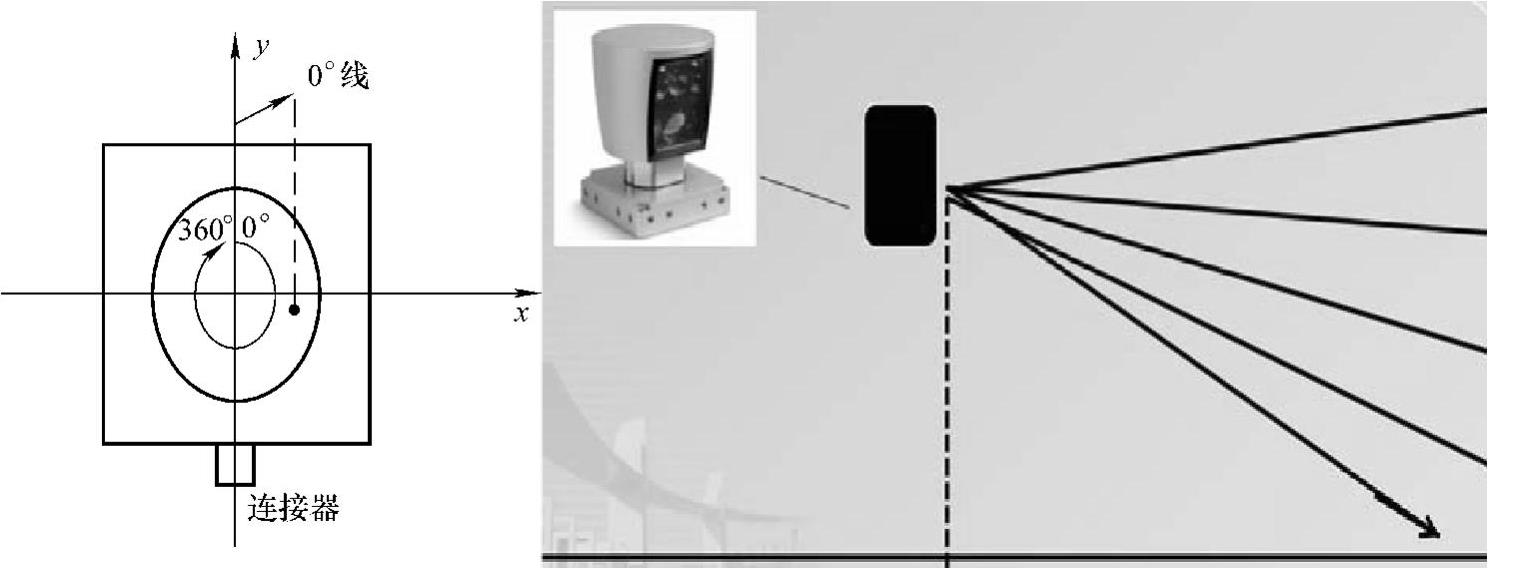
图8-7 雷达扫描范围
表8-264 线雷达相关数据

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。
有关视频图像处理与性能优化的文章







