激光雷达从20世纪60年代开始得到了快速的发展。激光传感器是一种主动传感器,对环境的感知信息来源于自身,因此受外界干扰小。它可以直接获取环境中被测物体的深度信息,通过激光束的扫描,能够为自主车的导航提供有效、丰富的障碍位置信息。
无人自主车是激光雷达主要的实验平台。无人自主车是一种复杂的人工智能系统,主要由环境感知模块、规划决策模块和运动控制模块组成。它是利用车载传感器来感知车体周围环境,并根据感知所获得的障碍物、道路和自身车体的位置信息,由规划系统给出路径点和速度,并由控制系统控制无人车的转向和速度,最终使得无人车能够安全、可靠地行驶。图8-2是典型的无人自主车系统的模块架构框图。
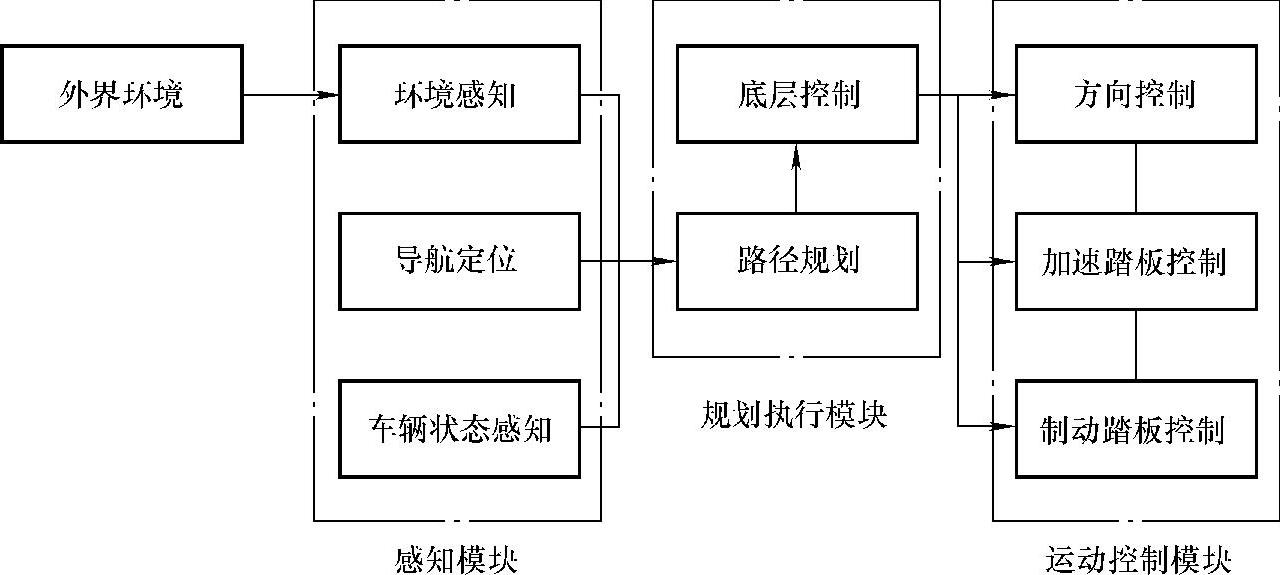
图8-2 典型无人自主车系统架构
无人车的智能程度主要取决于传感器对于环境的感知能力。无人自主车在复杂环境下驾驶中必须要面临一系列非常具有挑战性的环境感知问题,比如道边检测和跟踪、交通标志和交通信号灯的识别、障碍检测、目标检测、跟踪预测动态障碍物等。激光雷达在无人车中的主要环境感知内容有障碍检测、动态障碍跟踪、目标识别、同步建图(SLAM)、道边检测等。
 障碍检测是激光雷达最基本也是最重要的感知能力,稳定检测障碍信息是确保自主车在路径规划中避免碰撞、安全避开障碍物的基础。雷达数据分割方法大致可分为基于栅格的和基于图的两种。Jacoby Larson提出了一种基于栅格的障碍检测方法,ChunzhaoGuon等在栅格表示的基础上采用了马尔可夫随机场进行全局优化;Dominik Steinhauser等使用RANSAC平面拟合对数据进行分割;Frank Moosmann提出了局部数据块法向量聚类的方法进行分割;M.Himmelsbach等人提出了先用网格划分再用各射线方向直线拟合来判断路面点和外点。
障碍检测是激光雷达最基本也是最重要的感知能力,稳定检测障碍信息是确保自主车在路径规划中避免碰撞、安全避开障碍物的基础。雷达数据分割方法大致可分为基于栅格的和基于图的两种。Jacoby Larson提出了一种基于栅格的障碍检测方法,ChunzhaoGuon等在栅格表示的基础上采用了马尔可夫随机场进行全局优化;Dominik Steinhauser等使用RANSAC平面拟合对数据进行分割;Frank Moosmann提出了局部数据块法向量聚类的方法进行分割;M.Himmelsbach等人提出了先用网格划分再用各射线方向直线拟合来判断路面点和外点。
 基于激光雷达的动态障碍跟踪是在障碍检测的基础之上,通常环境中的动态障碍物主要是行人和车辆。动态障碍物跟踪的一般步骤是:数据分割、聚类、数据关联跟踪、滤波器预测更新。动态障碍的判断一般可以根据相邻帧障碍物的位移差以及无人车自身GPS的位移信息来判断。另外障碍物是动态还是静态也可以由毫米波雷达提供的二维位置坐标和速度来融合确定。在描述障碍物方式上,一般有盒子模型和点模型。盒子模型可以很方便地表示障碍物的大小、位置、速度信息,因此大多系统会采用盒子模型来描述障碍物。常用的数据关联算法有最近邻法、联合概率数据关联法、多假设跟踪等。最近邻数据关联算法是由Singer等在1971年提出的。该算法的大致思想是,优先选取落在相关跟踪门限阈值,同时与跟踪目标预测位置最接近的检测目标作为其关联对象。最近邻法实际上是一种局部最优的贪婪算法,它并不能保证数据关联的结果达到全局最优。联合概率数据关联算法是由Shalom等人在概率数据关联(Probability Data Association)算法的理论基础上提出来的,综合考虑跟踪门限阈值内的所有检测目标的概率。多假设跟踪是一种最大后验概率估计器,结合了最近邻算法以及联合概率数据关联的优点。(www.daowen.com)
基于激光雷达的动态障碍跟踪是在障碍检测的基础之上,通常环境中的动态障碍物主要是行人和车辆。动态障碍物跟踪的一般步骤是:数据分割、聚类、数据关联跟踪、滤波器预测更新。动态障碍的判断一般可以根据相邻帧障碍物的位移差以及无人车自身GPS的位移信息来判断。另外障碍物是动态还是静态也可以由毫米波雷达提供的二维位置坐标和速度来融合确定。在描述障碍物方式上,一般有盒子模型和点模型。盒子模型可以很方便地表示障碍物的大小、位置、速度信息,因此大多系统会采用盒子模型来描述障碍物。常用的数据关联算法有最近邻法、联合概率数据关联法、多假设跟踪等。最近邻数据关联算法是由Singer等在1971年提出的。该算法的大致思想是,优先选取落在相关跟踪门限阈值,同时与跟踪目标预测位置最接近的检测目标作为其关联对象。最近邻法实际上是一种局部最优的贪婪算法,它并不能保证数据关联的结果达到全局最优。联合概率数据关联算法是由Shalom等人在概率数据关联(Probability Data Association)算法的理论基础上提出来的,综合考虑跟踪门限阈值内的所有检测目标的概率。多假设跟踪是一种最大后验概率估计器,结合了最近邻算法以及联合概率数据关联的优点。(www.daowen.com)
 基于激光雷达的目标识别,大致可以分为基于模版匹配的方法和基于特征描述的方法。基于模版匹配的方法一般研究特定目标的模型,然后通过计算被检测物体和给定模版的相似程度来判别。而基于特征描述的方法,则主要研究如何提取障碍物的有效特征。单线激光雷达的目标识别采用片段的轴线特征来分类,而由于多线激光雷达可以获取丰富的三维障碍信息,因此更多研究是基于点云分布和强度分布特征来分类的。对于特征提取的研究大致有三方面:几何形状、3D点云分布和反射强度概率分布。在基于特征提取分类中,目前较多研究采用机器学习的方法,手工标记样本训练特定的分类器。准确的目标识别一方面可以提供更加丰富的障碍信息给路径规划,另一方面也可以减少目标跟踪匹配中的干扰。
基于激光雷达的目标识别,大致可以分为基于模版匹配的方法和基于特征描述的方法。基于模版匹配的方法一般研究特定目标的模型,然后通过计算被检测物体和给定模版的相似程度来判别。而基于特征描述的方法,则主要研究如何提取障碍物的有效特征。单线激光雷达的目标识别采用片段的轴线特征来分类,而由于多线激光雷达可以获取丰富的三维障碍信息,因此更多研究是基于点云分布和强度分布特征来分类的。对于特征提取的研究大致有三方面:几何形状、3D点云分布和反射强度概率分布。在基于特征提取分类中,目前较多研究采用机器学习的方法,手工标记样本训练特定的分类器。准确的目标识别一方面可以提供更加丰富的障碍信息给路径规划,另一方面也可以减少目标跟踪匹配中的干扰。
 路边(curb)检测不同于障碍检测,路边一般是指机动车和人行道的分割边界,是机动车辆驾驶的一种交通限制线。路边检测的研究有基于相机视觉传感器和基于激光雷达点云特征。Oniga等人利用立体视觉和Canny算法来寻找路边。Gangqiang Zhao等人利用三维激光雷达点云中三个空间线索:高度差距、梯度值、法向量的方向,通过拟合抛物线模型进行稳定的路边检测和跟踪。
路边(curb)检测不同于障碍检测,路边一般是指机动车和人行道的分割边界,是机动车辆驾驶的一种交通限制线。路边检测的研究有基于相机视觉传感器和基于激光雷达点云特征。Oniga等人利用立体视觉和Canny算法来寻找路边。Gangqiang Zhao等人利用三维激光雷达点云中三个空间线索:高度差距、梯度值、法向量的方向,通过拟合抛物线模型进行稳定的路边检测和跟踪。
激光雷达在无人自主车平台上的成功使用,足以显示出其在地面无人自主车智能导航中的至关重要的地位。激光雷达1+2融合扫描覆盖范围如图8-3所示;IBEO激光雷达4+2融合系统如图8-4所示。

图8-3 激光雷达1+2融合扫描覆盖范围示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





