工作在红外和可见光波段的雷达称为激光雷达(Light Laser Detection and Ran-ging,LIDAR),又可以称为激光探测及测距系统。它是用激光器作为发射光源,由发射系统、接收系统、信息处理等部分构成。它是激光技术、大气光学技术和雷达技术结合的产物。
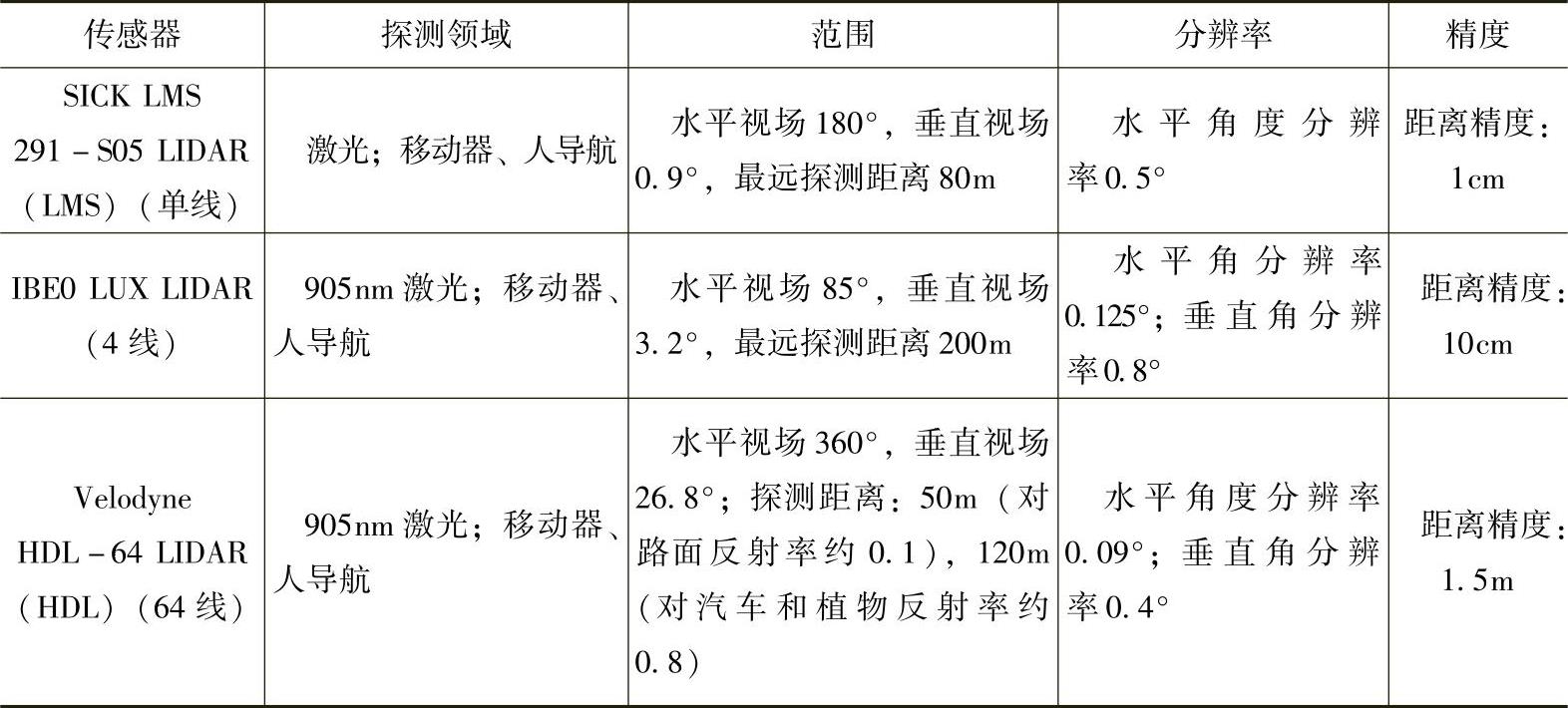
车载激光雷达是指安装在自主车上的用于自主车导航的激光测距雷达。根据扫描机构的不同,可以分为单线扫描激光雷达、多线扫描激光雷达和面阵激光雷达。单线扫描激光雷达只有一条扫描线,通过旋转扫描得到一条线上的深度信息,如德国SICK光电设备公司研发的LMS系列激光雷达;多线扫描激光雷达通过多条扫描线的旋转扫描,得到多条线上的深度信息,如德国IBEO公司的LDML激光雷达和美国Velodyne公司的64线/32线激光雷达为面阵激光雷达,扫描的则是一个面,得到一个面上的深度信息。图8-1所示为三种典型激光雷达的传感器。表8-1是这三种典型激光传感器的性能参数。

图8-1 三种典型激光雷达的传感器
表8-1 三种典型激光传感器的性能参数
 (https://www.daowen.com)
(https://www.daowen.com)
车载激光雷达的基本测距原理都是测量发射光束与从被测物体表面反射光束的时间差,通过时间差和光速来计算被测物体到激光雷达的距离:距离=时间差×光速÷2。而测量时间差又有三种不同的技术。
 脉冲检测法:直接测量反射脉冲与发射脉冲之间的时间差(time-of-flight,TOF)。早期雷达均用显示器作为终端,在显示器画面上根据扫掠量程和回波位置直接测读延迟时间。现代雷达常常采用电子设备自动地测读回波到达的延迟时间。
脉冲检测法:直接测量反射脉冲与发射脉冲之间的时间差(time-of-flight,TOF)。早期雷达均用显示器作为终端,在显示器画面上根据扫掠量程和回波位置直接测读延迟时间。现代雷达常常采用电子设备自动地测读回波到达的延迟时间。
 相干检测法:通过测量调频连续波(Frequency-Modulated Continuous-Wave,FMCW)的发射光束和反射光束间的差频来测量时间差。
相干检测法:通过测量调频连续波(Frequency-Modulated Continuous-Wave,FMCW)的发射光束和反射光束间的差频来测量时间差。
 相移检测法:通过测量调幅连续波(Amplitude-Modulated Continuous-Wave,AMCW)的发射光束和反射光束间的相位差来测量时间差。
相移检测法:通过测量调幅连续波(Amplitude-Modulated Continuous-Wave,AMCW)的发射光束和反射光束间的相位差来测量时间差。
由于相位差的2π周期性,这一方法测得的只是相对距离,而非绝对距离,这是AMCW激光成像雷达(LIRS)的重大缺陷。其中2π相位差所对应的距离称为多义性间距(Ambiguity Interval)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




