车道分界线是用来分隔同方向行驶的交通流的交通标志线,凡同方向车行道有两条或两条以上车道时,均应划车道分界线。车道分界线有两种,即车道分界虚线和导向车道分界实线。在保证安全的原则下,车道分界虚线准许车辆越线超车或变更车道行驶;导向车道分界实线不准车辆越线或变更车道。
车载相机采集到的图像容易受外界环境,如光照、天气、阴影等因素的影响,导致车道边缘模糊,同时道路图像还包含了大量的干扰信息,如路旁树木、栅栏等,给车道线的识别增加了难度,因此需对图像进行预处理,改善图像质量,提取感兴趣信息,剔除掉无关信息。
为了降低计算的复杂度,需要将图像灰度化(图2-5,见彩插),然后对灰度图像滤波处理,去除噪声后的道路图像经过二值化转变成黑白图像,最后对二值图像提取感兴趣区域和边缘。
为了提高图像中车道线信息的可识别性,降低车道线识别算法的复杂度,需要对采集到的图像进行滤波处理,去除图像中的噪声。图像去噪处理多采用平滑技术,主要包括频域滤波和空域滤波两大类。频域滤波需要将信号从空间域转换到频率域,计算量很大,很难满足系统的实时性要求。空域滤波是在空间域内对图像像素的灰度值进行处理,是常用的滤波算法,一般常用的空间域滤波方法为中值滤波。

图2-5 车道线图像灰度化
中值滤波是一种在去除噪声的同时又能保护目标边界信息,不使其边缘变得模糊的非线性处理技术。它将每一像素点的灰度值设置为该点某邻域窗口内的所有像素点灰度值的中值。所以其对汽车抖动引起的边缘毛刺,以及汽车制动对车道标识线的损伤和孤立等噪声有较好的滤波效果。中值滤波的数学表达式如式(2-1)所示。
f(i,j)=median{Sf(i,j)} (2-1)
式中,{Sf(i,j)}是当前点f(i,j)的邻域。
图像的绝大部分能量一般位于信号的低频部分,噪声位于高频部分,而图像中的一些边缘和细节信息也位于高频部分,采用中值滤波的好处就是既滤除高频的噪声干扰,又能很好地保留边缘信息。道路图像经过灰度变化和滤波后的图像如图2-6所示。

图2-6 原始图和灰度化中值滤波后的图像
道路图像经过滤波处理后,包含大量的背景干扰信号。为了提取出感兴趣的车道线区域,提高车道线检测的实时性和准确性,需要从道路图像中将车道线区域分割出来,即所谓的图像分割处理。图像分割即为选择一个合理的阈值,将图像划分为目标区域和背景区域。
阈值分割是基于区域的图像分割技术,其基本原理是:设定不同的阈值,把像素点分成若干类。假设原始图像的像素值为f(x,y),按照一定的准则找到阈值T,将图像分割为两部分,分割后的图像像素值为:
 (https://www.daowen.com)
(https://www.daowen.com)
当图像中某点灰度值大于阈值T时,则把该点置为255(白色),反之则置为0(黑色)。该方法的分割效果受阈值影响很大,同时在不同环境下阈值需要重新调整,效果不佳。
最大类间方差法由日本学者大津展之于1979年提出,又称大津算法(OTSU)。大津算法(OTSU)是一种全局阈值选取法,它在判别式分析最小二乘原理的基础上推导得出,因其算法简单,所以是被广泛使用的图像分割算法。
在图像中,方差是灰度分布是否均匀的度量之一。方差越大,说明图像中的背景和目标的差别就越大。当一些背景区域错误划分为目标或者一些目标区域错误划成背景时,背景和目标的差别就会变小。因此采用类间方差最大的图像分割,其错分的概率就最小。
假设图像的目标和背景的分割阈值为T,且前景像素点数占图像的比例为ω1,其平均灰度为μ1;背景像素点占图像的比例为ω2,平均灰度为μ2;图像的平均灰度记为μ,类间方差记为g。
M×N大小的图像中像素的灰度值小于阈值T的像素个数记作N1,像素灰度大于阈值T的像素个数记作N2,则有:
将式(2-7)代入式(2-8),得到等价公式:
g=ω1×ω2×(μ1-μ2)2 (2-9)
当方差g最大的时候,就是目标和背景的差异最大的时候,此时得到的灰度值就是最佳阈值。可以得到大津算法(OTSU)计算最佳阈值T的公式:

在gmin<t<gmax中穷举每一个t值,使得dist取得最大值的t即为要求的阈值。大津算法(OTSU)二值化的效果图如图2-7所示。
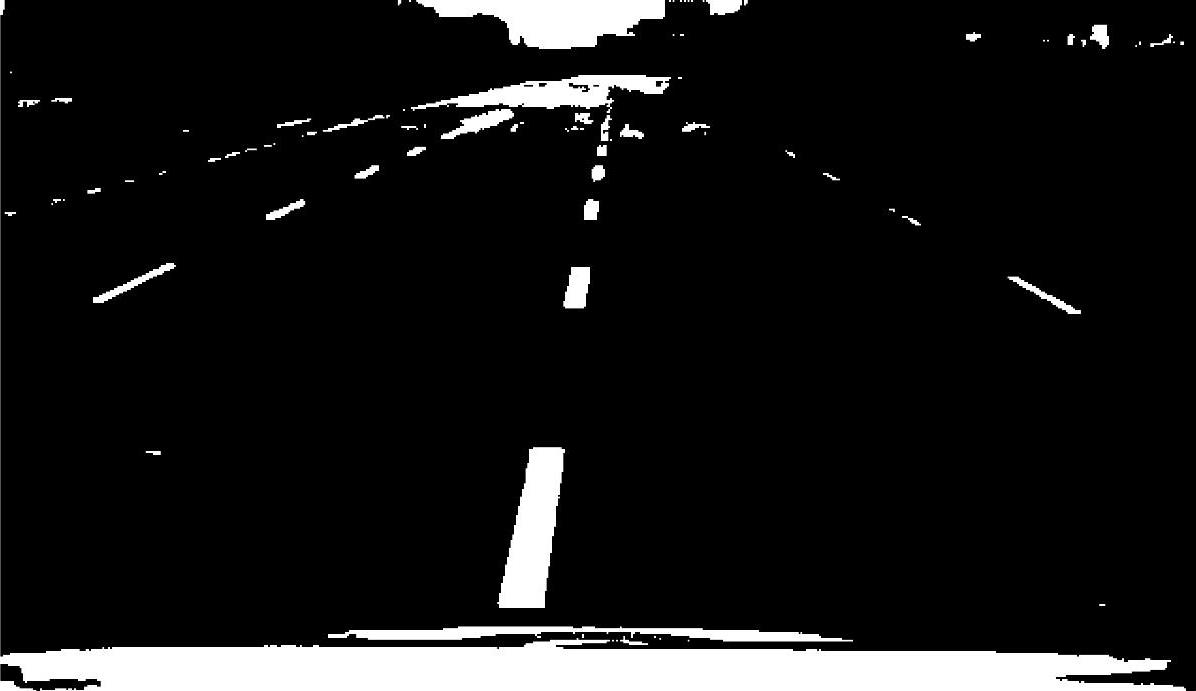
图2-7 大津算法(OTSU)二值化的效果图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





