1.美国
美国于20世纪50年代开始对无人驾驶车辆进行研究,在1980年左右其技术得到高速发展。20世纪80年代,美国陆军开始与国防高级研究计划局(DARPA)进行合作,开展了自主地面车辆(AVL)项目。1995年由卡耐基梅隆大学研制的Navlab-V智能车,完成了横穿美国东西部的无人驾驶试验。美国国防部门在20世纪90年代末开始进行DEMO系列无人驾驶车辆的研制,总共研制出了十代DEMO无人车。
从2004年开始到2007年,美国国防高级研究计划局(DARPA)举办了3次无人驾驶车辆比赛,主要为了考察在复杂环境下无人驾驶车辆的自主行驶能力。2004年3月在美国西部的莫哈维沙漠(Mojave Desert)举办了首届DARPA挑战赛——崎岖地形大挑战。共有15支队伍参赛,最终没有一支车队完成比赛,其中行驶距离最远的一支队伍是卡耐基梅隆大学的Sandstorm无人驾驶车辆(图2-1)。

图2-1 首届DARPA挑战赛中行驶距离最远的Sandstorm无人驾驶车辆
第二届DARPA挑战赛——沙漠挑战赛于2005年10月还是在美国西部的莫哈维沙漠举办,共有23支队伍参赛,最终只有4队在规定时间内完成比赛,斯坦福大学的Stanley无人驾驶车辆获得了第一名(图2-2)。
第三届DARPA挑战赛——城市挑战赛于2007年11月在洛杉矶东北维克多维尔的一个废弃空军基地举办,共89支队伍参赛,只有l1支队伍取得决赛资格,最终3辆车在无人干预下完成比赛,另外3辆车在少量人工干预下完成比赛。卡耐基梅隆大学的Boss、斯坦福大学的Junior和弗吉尼亚州大学的Odin获得这次比赛的前三名。
谷歌公司研制了7辆无人车(图2-3),并于2010年对它们开展了城市实际道路测试。这些无人驾驶车辆可以进行正确的行驶,具有完备的感知能力和高水平的人工智能,无人车可以自动地识别信号灯、行人以及车辆等。谷歌公司的无人车同时还可以运用谷歌街景地图对车辆进行导航,在内华达州、佛罗里达州和加利福尼亚州已专门为无人驾驶车辆上路制定并通过了相关法律。

图2-2 第二届DARPA挑战赛中获得第一名的Stanley无人驾驶车辆(www.daowen.com)
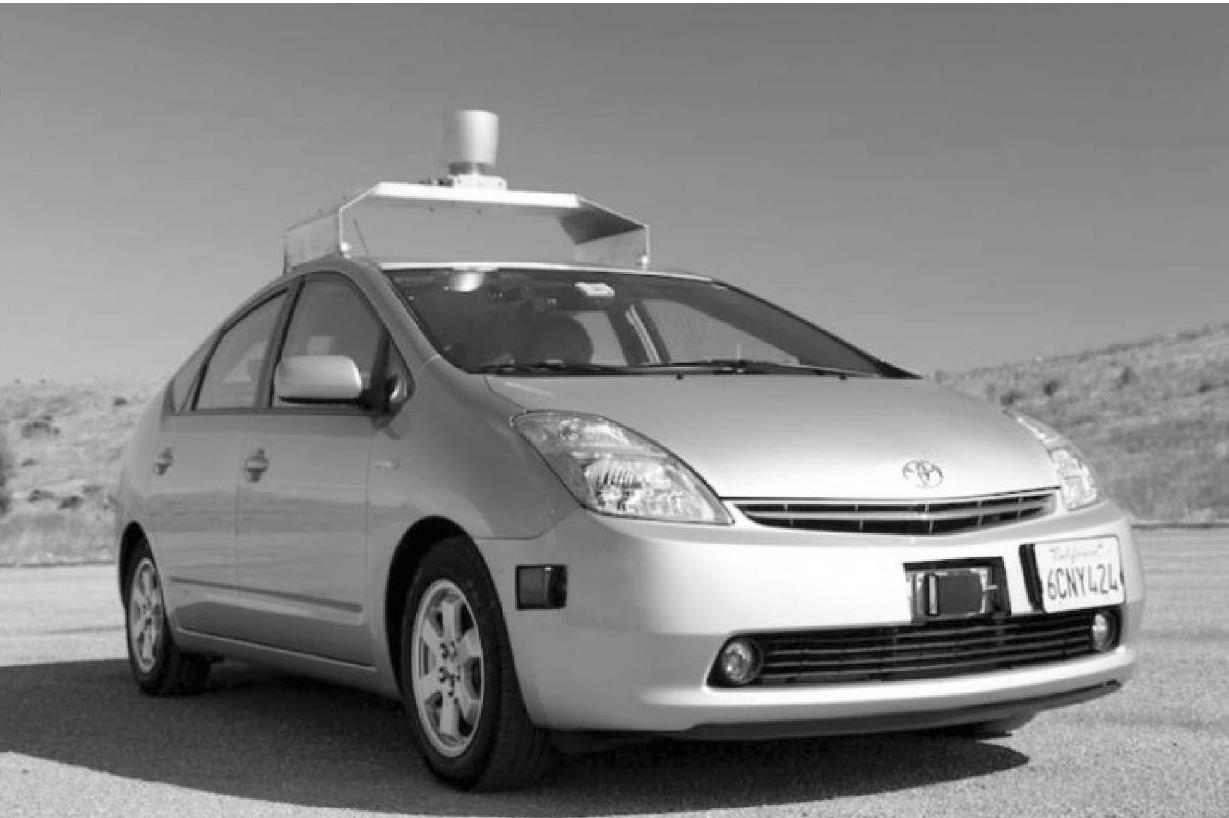
图2-3 谷歌无人驾驶汽车
2012年,谷歌宣布其公司的十余辆无人驾驶汽车已经在计算机的控制下安全行驶了30万mile(约48万km)。5月8日,美国内华达州机动车辆管理部门(DMV)为谷歌的自动驾驶车颁发了首例驾驶许可证,这意味着谷歌自动驾驶车将很快在内达华州上路。内华达政府相关人士表示:无人驾驶汽车上路测试的前提是,确保总有人能够在转向盘后进行控制,另外还有一人能够观察驾驶系统。
2.欧洲
欧洲各国的无人驾驶车辆技术在世界上也处于领先水平,他们在无人驾驶车辆及其相关领域进行了很多科学研究工作,比如PROMETHEUS计划和PREVENT计划。1987年到1995年间,PROMETHEUS计划是欧洲在无人车研究领域最大的项目,其领军人ErnstDickmanns于1994年带领项目组研制的VaMP和VITA-2机器人车辆在法国的高速公路上行驶了1000多km,能自主完成变道、超车和跟踪行驶,车辆行驶速度最高能达到130km/h。Ernst Dickmanns在1995年又重新对奔驰自主车进行了设计,进行了1600km路程的行驶测试,车辆的最高行驶速度超过了175km/h。
欧盟对PREVENT项目的总资金预算超过了5500万欧元,总共有50多家单位参与进了该项目,其中包括著名的研究机构和汽车生产厂商。PREVENT项目为无人驾驶车辆研究提出了时间-碰撞时间表,虚拟安全带和智能车辆由感知、决策、执行三层架构组成这三个总体概念。
意大利帕尔玛大学研制的ARGO智能车也达到了很高的水平,2010年10月,ARGO试验车只用了极少次的人工干预,从罗马出发成功抵达上海,总共行驶了13000多km,历时3个多月。德国柏林自由大学研制的无人驾驶车辆MadeinGer-many,从柏林勃兰登堡门出发,自主行驶到柏林国际会议中心后,又安全返回出发地,顺利通过了46个交通灯并绕过两处环岛,整个行程近20km,代表了目前无人驾驶车辆的世界最高水平。
牛津大学研制的无人驾驶车辆Wildcat不使用GPS,它使用激光雷达和立体相机监控路面状况、交通状况,以及行人和其他障碍物,在崎岖山路上能实现自主行驶、堵车绕道;牛津大学另外研制的无人驾驶车辆RobotCarUK使用iPad处理数据、输出指令,不使用GPS,但是只能在熟悉环境下发挥作用,成本低廉,仅使用一套7750美元的立体相机和激光系统对汽车前方道路进行识别与定位,该无人驾驶车辆是为短途、常规驾驶的路途而设计的。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






