随着现代科学技术的发展,特别是图像处理技术、计算机视觉技术、机器学习技术的长足进步与系统工程思想的深入,人们在对这些技术进行集成的基础上提出了许多新的交通标志检测与识别方法,使得交通标志检测与识别的研究越来越趋向于实际应用。而如何提高在复杂的真实场景中交通标志的定位准确率和分类准确率,如何提高检测分割、特征提取、分类算法的处理速度,如何使得所采用的技术以及开发的系统具有广泛的适用性与实际使用价值等,成为许多交通标志识别研究领域的相关学者与机构急需解决的共性问题。
图像预处理指的是通过算法突出令人感兴趣的信息,削弱或去除不必要的干扰,使处理后的图像更能辅助后续算法的实现。在模式识别的领域中,需根据不同目标的特征,应用适当的预处理方法。
以提高系统的鲁棒性、实时性、特征针对性为目标,图像预处理流程包括:灰度化、图像灰度增强、滤波去噪和二值化。结合加权平均法和彩色通道提取法,对图像进行灰度化,增强了车道线边界特征;利用基于直方图均衡化的方法扩展了灰度级的动态范围,使系统在光照变化的条件下表现出更好的适应性;应用中值滤波的方法对图像进行滤波去噪处理,改善了图像质量;在二值化的过程中,对比了传统最优阈值法和最大类间方差法,最终使用后者获取了车道二值图像。
大部分机器视觉传感器采集到的原始道路图像均为彩色图像。在彩色图像内,任意颜色都可以通过红(Red)、蓝(Green)、绿(Blue)这三种基本颜色的不同配比得到,所以用RGB模型描述彩色图像是最常用的。在此模型中,当B=G=R时,则实现了彩色图像的灰度化,其值被称为灰度值。在灰度图像中,只需为每个像素分配一个字节便可存放此灰度值。定义黑色的灰度值为0,白色为255,把黑到白之间的灰度平均划分为256个等级。即便在灰度化图像的过程中,会丢失一些信息,但对彩色图像的三个分量进行处理,会较大程度地拖慢系统的运算速度。从系统整体分析,把三个分量并作一个进行处理,是必要且可行的。彩色图像进行灰度化的五种常用方法分别是:分量法、最大值法、平均值法、加权平均法和彩色通道提取法。
一般情况下,只经过灰度处理的图像往往存在着一定程度的噪点干扰。此类干扰会使图像变得模糊,降低图像质量,使检测算法难以准确实现。滤波去噪是图像预处理过程中的常用方法。机器视觉中的噪点信号主要可分为加性噪点、乘性噪点及量化噪点。此方法对图像中的噪点信号有较好的过滤效果,可为检测算法提供更易识别的资源,为系统整体性能的实现提供支持。
检测交通标志最常用的方法包括颜色分割技术、特定形状检测技术,以及利用纹理、局部特征等设计分类器等方法。在颜色分割方面,颜色空间的选择非常重要。最普通的颜色特征即为RGB特征,但这类方法对光照变化非常敏感。在分割技术方面,常用的交通标志检测方法通常需要设计许多阈值,而这些阈值的确定在实际中非常困难的。(https://www.daowen.com)
视频图像处理过程中会涉及对视频图像数据的采集、传输、处理、显示和回放等过程,这些过程共同形成了一个系统的整体周期,可以连续性地运作。在视频图像处理技术范围内最主要的技术就是图像压缩技术和视频图像处理技术等。目前,在智能驾驶领域主流的视频图像处理技术包括视频透雾增透技术和智能分析处理。
视频透雾增透技术,一般指将因雾和水汽灰尘等导致朦胧不清的图像变得清晰,强调图像当中某些令人感兴趣的特征,抑制不感兴趣的特征,使得图像的质量改善,信息量更加丰富。如图1-1所示(见彩插),雾霾天气以及雨雪、强光、暗光等恶劣条件导致视频图像的图像对比度差、分辨率低、图像模糊、特征无法辨识等,增透处理后的图像可为图像的下一步应用提供良好的条件。这可以为我们的无人驾驶智能车在雾霾天气以及雨雪、强光、暗光等恶劣天气下提供良好的解决途径,获得更加清晰、易识别的视频图像。
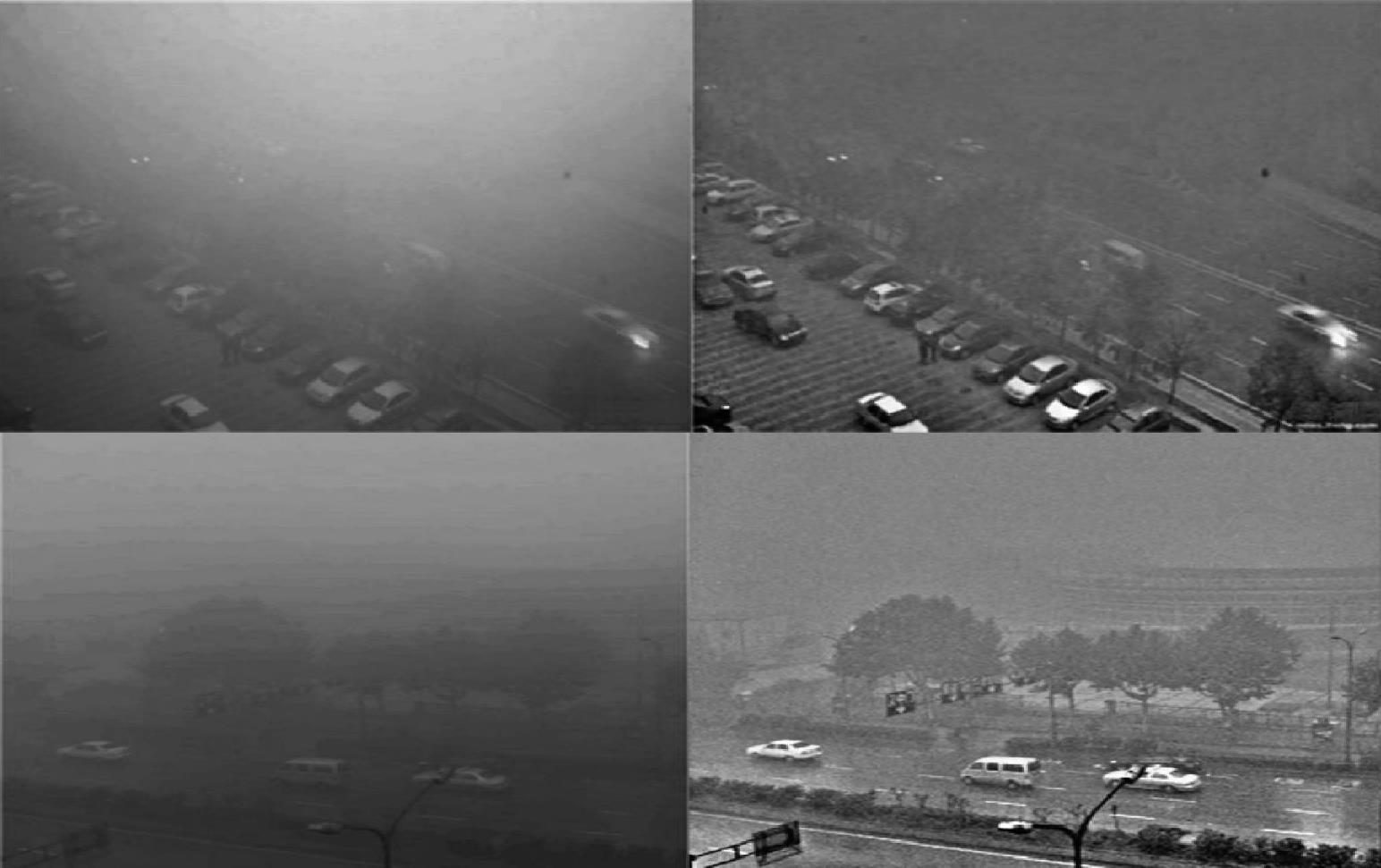
图1-1 恶劣天气下视频图像处理对比图
智能视频分析技术是解决视频监控领域大数据筛选、检索技术问题的重要手段。目前国内智能分析技术可以分为两大类:一类是通过前景提取等方法对画面中的物体的移动进行检测,通过设定规则来区分不同的行为,如拌线、物品遗留、周界等;另一类是利用模式识别技术对画面中所需要观察的物体进行有针对性的建模,从而达到对视频中的特定物体进行检测及相关应用,如应用在无人驾驶智能车上的车辆检测、人流统计、人脸检测等技术。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





