上述探头跟踪机构运动学建模分析是为了辅助检测探头完成钢管抱合动作。但由于钢管存在圆度误差、传送装置存在直线度和水平度误差,因此势必会影响检测探头抱合钢管的紧密程度或造成检测探头与钢管之间的相对角度产生变化,从而降低检测信号的可靠性和准确性。探头最优检测姿态的微小浮动自由度实现主要靠沿x、y轴的微小移动和绕y、z轴的微小转动这4个自由度来完成。
由于检测探头螺旋扫查钢管,因此探头在钢管周向上所处角度的微小变化对检测影响不大。可将沿x、y轴的微小移动跟踪进行综合,转化为斜线跟踪,即采用一种相对于这两个方向为斜线的跟踪方式,将探头x、y轴的运动转化为斜线运动。对于绕y、z轴的微小转动跟踪,则可在前端探头设置y、z转动轴,以满足探头的转动跟踪。
对于漏磁检测,介绍一种如图6-33所示的前端探头跟踪形式。摇臂即为图6-31中的连杆L3,摇臂L3绕关节A3的摆动采用气缸驱动,具有实现方式简单、控制方便等优点,最重要的是,可以为检测探头提供主动压紧力作用于钢管外表面,保证检测探头紧贴钢管扫查。将气缸作用力点与探头安装点错开,使得探头摆动幅度更大,且有利于摇臂摆动的跟踪。靠近关节A3作用点的设计可以缩短气缸的行程,且气缸活塞杆伸出长度的缩短也有利于压紧力的实施,减小抖动。当钢管存在x、y轴微小移动时,将迫使检测探头在x、y轴方向上微小移动,这时可转化为沿气缸活塞杆作用轴线的运动,迫使活塞杆微小收缩或前伸。同时,气缸活塞杆的压紧力可以保证检测探头在收缩或前伸的过程中,始终紧贴抱合钢管。在相对比较恶劣的检测情况下,还可以通过增加气缸气源的压力以增加探头的跟踪稳健性。检测探头在摇臂前端设置有y、z转动轴(互相垂直的转动轴),以保证检测过程中探头的随动转动跟踪(转动范围较小,满足跟踪要求即可)。值得注意的一点,在摇臂与z转动轴之间连有拉簧,以保证检测探头始终处于抬起状态,有助于探头抱合钢管。
漏磁检测探头一般为条状式。为了满足条状探头的定位要求并节约成本,需要配合使用耐磨靴,每种规格的钢管外径应与耐磨靴内径相等,相互扣合。条状探头具有通用性,更换钢管规格时,仅需更换耐磨靴,极大地延长了探头的使用寿命,节约了设备的使用和维护成本。实践证明,这种前端探头跟踪结构有着很好的钢管抱合和跟踪浮动效果,能够满足自动化无损检测设备中钢管的多自由度跟踪,有助于提升信号的一致性和稳定性。(https://www.daowen.com)
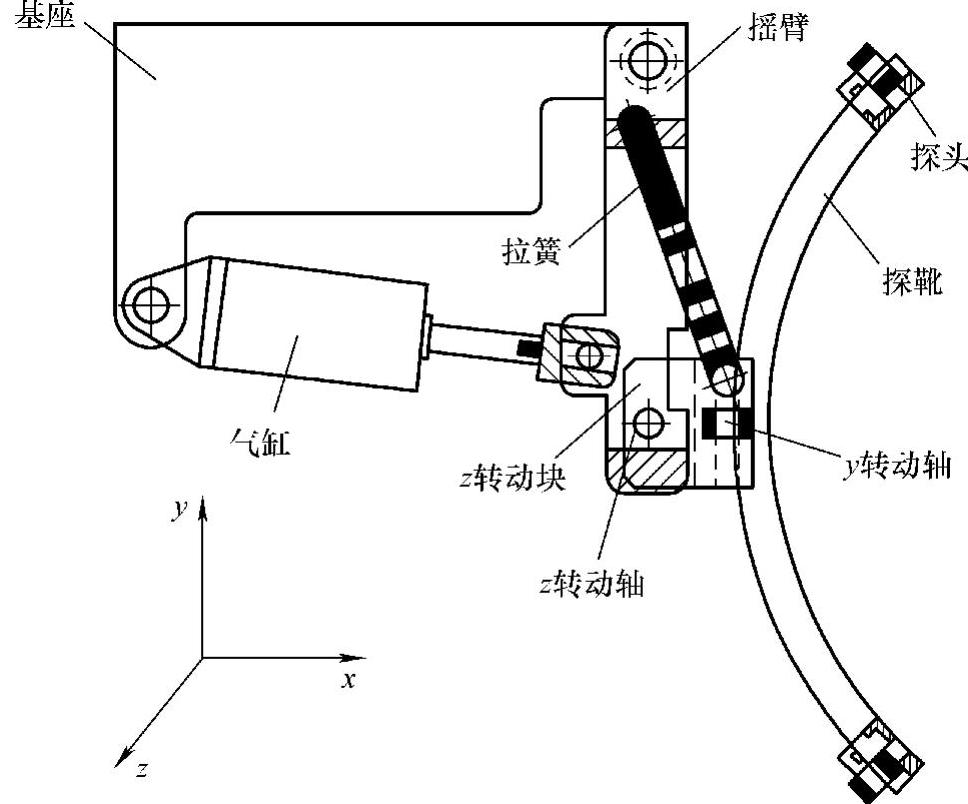
图6-33 漏磁前端探头跟踪自由度结构
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






