机构的运动学分析不考虑机构运动的原因——作用力,而只研究机构各部分之间的运动关系。具体而言,机构运动学分析是对给定的机构研究其构件或各关键部位之间的位移、速度和加速度之间关系及变化规律。运动学描述了机械手关节与各连杆之间的运动关系,其运动方程也被称为位姿方程,是进行机械手执行机构运动状态分析的基本方程。通过运动学分析,可获知末端执行机构实现预定轨迹的能力或实现轨迹的情况下机构的运动性能。
1.机构运动学建模理论
机械手运动学模型建立主要以Denavit-Hartenberg(D-H)模型为主。下面对D-H模型建立的理论基础和一般步骤进行简单介绍,通用连杆—关节组合的D-H表示如图6-30所示。
机械手可以看成由处于任意平面的若干关节(滑动或旋转)和连杆(任意长度与形状)组成。首先确定相邻关节本地参考坐标系间的变化步骤和变换矩阵,随后联立所有变换矩阵,得到机构的总变换矩阵(基础坐标系与执行坐标系间的关系式),也就得到了表示执行部件的位姿矩阵,建立机构的运动学方程。因此机构运动学建模的关键是实现任意两个相邻坐标系之间的变换,最后写出机构的总变换矩阵。
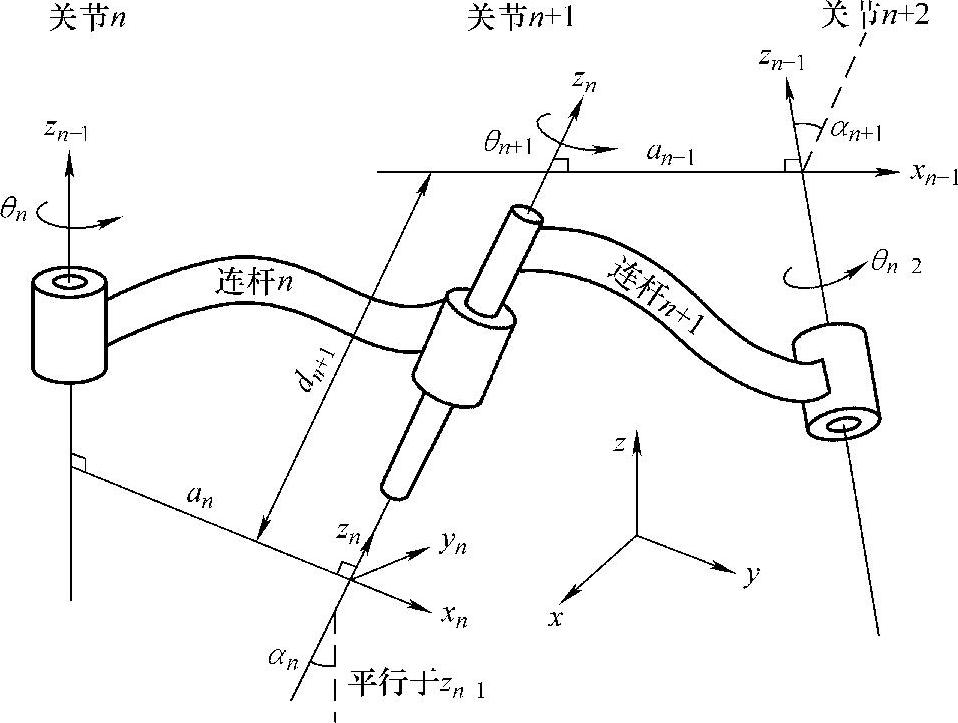
图6-30 通用连杆—关节组合的D-H表示
2.探头跟踪机构运动学
理想情况下,钢管只存在沿着z轴的直线运动和绕z轴的旋转运动。探头跟踪机构是由一系列连杆通过两个移动关节和一个转动关节串联而成的三自由度机械手结构,是一个空间开式运动链,链一端固定,另一端自由,用于安装检测探头。探头跟踪机构可简化为由基座、三个连杆(L1、L2、L3)、两个移动关节(A1、A2)和一个转动关节(A3)组成的系统,机构运动简图如图6-31所示,图中箭头方向代表了关节运动的参考正方向。
按照D-H建模方法和关节本地参考坐标系建立原则,建立如图6-32所示的检测探头跟踪机构连杆坐标系,其中O3-x3y3z3为末端执行器的本地坐标系。检测探头跟踪机构连杆结构参数及关节变量见表6-4,其中d2、d3为连杆结构参数(系统具体的机械结构确定后,为定值),x、y为移动关节(A1、A2)的变量值,β为转动关节(A3)的变量值。
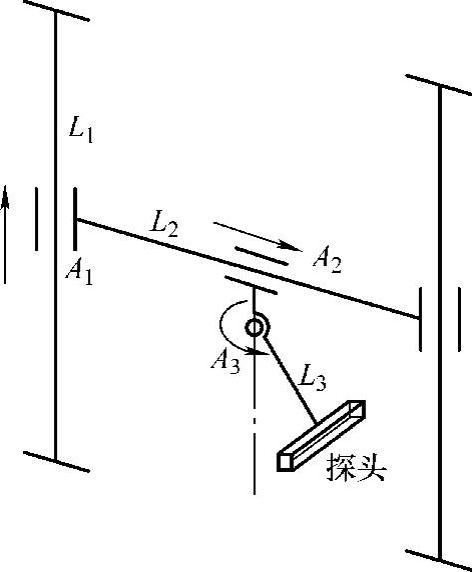
图6-31 探头跟踪机构运动简图(https://www.daowen.com)
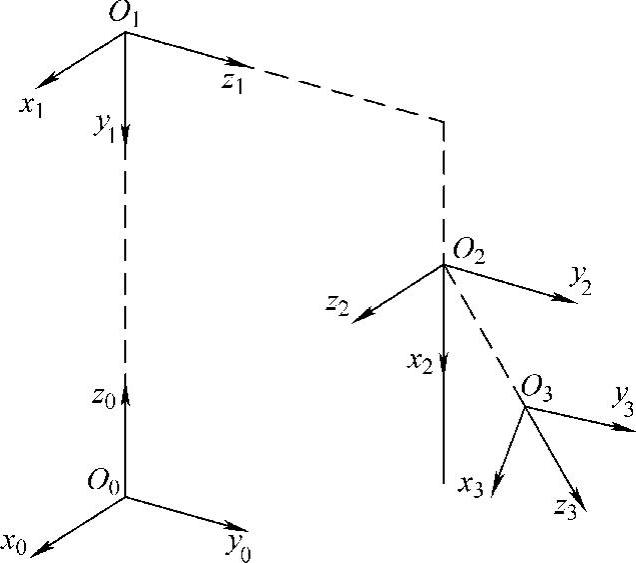
图6-32 检测探头跟踪机构连杆坐标系
表6-4 检测探头跟踪机构连杆结构参数及关节变量

根据机构运动学方程,可以得到连杆坐标系内相邻坐标系间的变换矩阵:
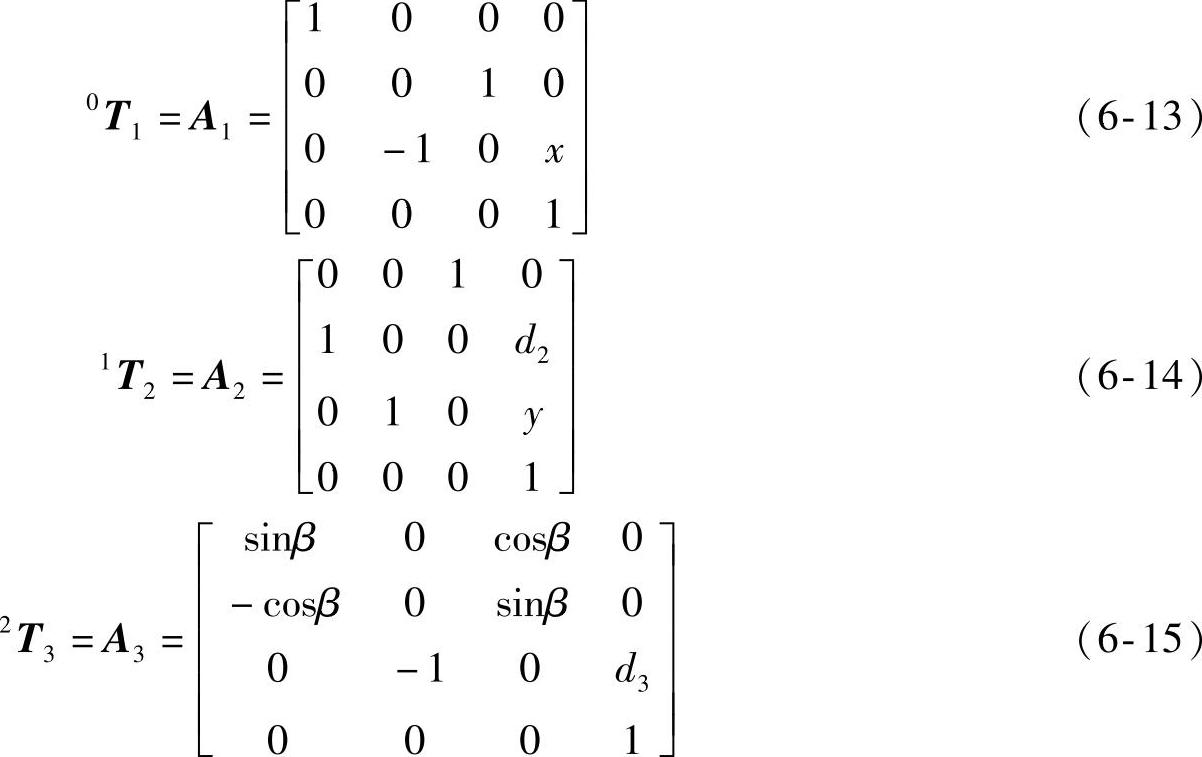
建立检测探头机构的总变换矩阵(探头跟踪机构的执行坐标系相对于基础坐标系的变换矩阵),即探头跟踪机构的运动学方程为

其中,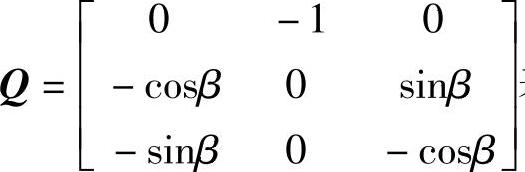 表示执行坐标系姿态,
表示执行坐标系姿态,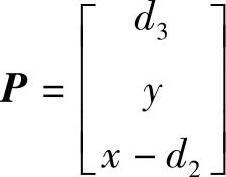 表示执行坐标系原点位置,均是相对于基础坐标系。
表示执行坐标系原点位置,均是相对于基础坐标系。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




