检测过程中,探头应保持最优检测姿态。对漏磁检测而言,探头应始终垂直于被检钢管圆周外表面并保持紧贴状态,以减小提离效应的影响并增大灵敏度;对超声检测而言,探头应相对于钢管轴心保持相同的入射角度和水层厚度,以防止超声波入射条件发生变化。然而,钢管的运动并不是一个理想状态下的运动。传送线的直线度误差与水平度误差、钢管的直线度误差等都会对探头跟踪机构的跟踪性能提出挑战。
完全确定一个物体的空间位姿所需要的独立坐标的数目,称为这个物体的自由度。刚体在空间自由运动时,确定位置需要x、y、z三个独立的空间坐标,为其平动自由度;确定通过质心轴的空间方位(三个方位角中只有两个是独立的)需两个转动自由度;确定刚体绕质心轴转过的角度θ为转动自由度。所以空间中自由运动的刚体共有六个自由度,即三个平动自由度和三个转动自由度。如图6-29所示,以钢管轴向为z轴、钢管截面为xOy面建立笛卡儿坐标系,易得描述钢管运动位姿的6个自由度,其为沿着x、y、z轴的移动自由度和绕x、y、z轴的旋转自由度。
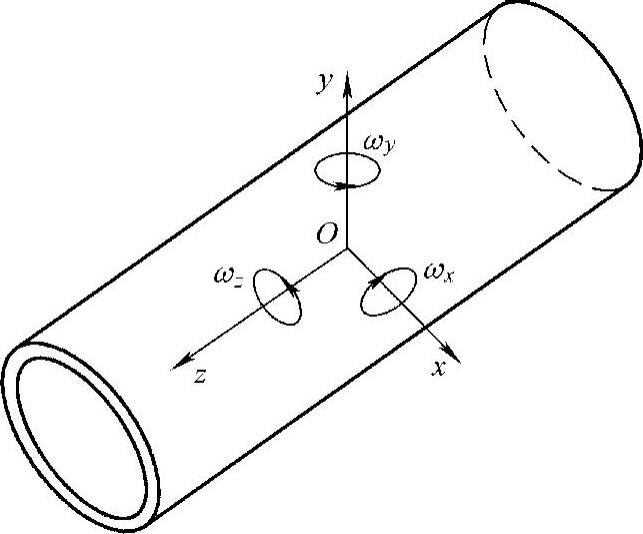
图6-29 钢管运动自由度示意图(www.daowen.com)
对于基于钢管旋转的自动化检测设备而言,理想状况下钢管只存在沿z轴的直线运动和绕z轴的旋转运动。然而在检测过程中,由于钢管存在直线度、圆度和传送线制造安装偏差等误差,钢管会存在沿x、y轴的微小移动和绕x、y轴的微小摆动。为了消除这些附加运动给检测信号带来的异常干扰,检测探头需跟踪钢管的这些运动,并始终保持最优检测姿态。也就是说,探头最优检测姿态的微小浮动自由度实现主要由沿x、y轴的移动和绕y、z轴的转动这4个自由度来完成。同时,由于不同外径规格的钢管在同一组传送轮上螺旋前进,势必会造成钢管中心高度的变化,导致探头跟踪机构还需实现探头的x、y轴大幅移动。
探头跟踪机构类似于机械手,是一个开式连杆系,主要由若干个连杆和运动关节组成,每个关节运动副只有一个自由度,即关节数等于自由度数。跟踪机构在各种驱动、传动装置及控制系统的协同配合下,在确定的空间范围内运动。其执行机构或终端效应器即检测探头,自由度是指用来确定手部相对于机身位置的独立变化的参数,它是对探头跟踪机构进行运动和受力分析的原始数据。通过探头跟踪机构的各连杆组合运动,可保证检测探头完成钢管抱合动作和上述4个自由度的运动跟踪,确保信号拾取的灵敏度和真实性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




