针对传统电磁机构拓扑的评价指标大都为静态指标,难以对运动过程进行定量评估。以快速性和可控性为基本特征的新型电磁机构,需要基于新的评价手段来研究其动态特性。选取能反映电磁机构动态性能的变量,提出更加合理的评价参数,并重点对三种电磁机构进行分析比较。
4.3.2.1 电磁力灵敏度分析
文献[2]中指出,电磁机构一般利用其额定功率,即P=I2R来衡量其灵敏度。该指标仅从机构动作所需能量的角度考虑,而无法反映动作过程中电磁系统对机械系统的控制敏感性。实际上,磁通、电磁力、速度等诸多参数皆可从不同角度描述电磁机构的运动过程,而且这些参数之间是相互关联的。由灵敏度分析理论可知,只要选取这些相互关联参数中的某一个来讨论电磁机构的灵敏度问题,即可保持所得结论的一般性。从运动学角度分析电磁机构,可得出其基本运动方程为

式中,式(4-58a)对应直线运动,式(4-58b)对应旋转运动,本质上这两个公式是一致的,只是反映的运动形式不同;Fe、FL、m、 分别对应直线运动系统的电磁力、阻力、运动部分的质量与加速度;Te、TL、J、
分别对应直线运动系统的电磁力、阻力、运动部分的质量与加速度;Te、TL、J、 分别对应旋转运动系统的电磁力矩、阻力矩、旋转部分的惯量与加速度。
分别对应旋转运动系统的电磁力矩、阻力矩、旋转部分的惯量与加速度。
从式(4-58)中可以看出,由机构电磁系统产生的电磁力作为驱动,可直接改变机构的运动状态,而对电磁机构而言,控制了电磁力也就等于控制了动力系统。因此,分析电磁力的灵敏度,可以反映机构的动态性能,对设计和控制电磁机构具有重要意义。
电磁力灵敏度问题,需要针对不同的电磁机构拓扑形式进行具体分析,但基本的计算公式共有两种:一种是麦克斯韦电磁力公式,另一种是安培力公式。对于作为众多电磁机构基础的电磁铁,在不考虑磁饱和时,其电磁力可依据麦克斯韦电磁力公式得到,即 ,其中,F为电磁力,i为线圈电流,N为线圈匝数,S为动铁心截面积,δ为气隙长度;而安培力由公式F=Bil进行计算;前者与电流的二次方i2成正比,后者与电流的一次方i成正比。因此,可将电磁力的计算形式归结为两类:一类为电流二次方的函数,另一类为电流一次方的函数。为分析方便,将电磁力灵敏度系数也分为两类。
,其中,F为电磁力,i为线圈电流,N为线圈匝数,S为动铁心截面积,δ为气隙长度;而安培力由公式F=Bil进行计算;前者与电流的二次方i2成正比,后者与电流的一次方i成正比。因此,可将电磁力的计算形式归结为两类:一类为电流二次方的函数,另一类为电流一次方的函数。为分析方便,将电磁力灵敏度系数也分为两类。
第一类描述F与i2之间的关系,即

定义c1为第一类电磁力灵敏度系数,它反映了电磁力对电流二次方的敏感度,即某种电磁机构要产生一定的电磁力所需电流二次方的大小。对于电磁铁,c1= ,该系数与运动行程δ的二次方成反比。
,该系数与运动行程δ的二次方成反比。
第二类描述F与i之间的关系,即

定义c2为第二类电磁力灵敏度系数,它反映了电磁力对电流的敏感度,即某种电磁机构要产生一定的电磁力所需电流的大小。
如果仅从电磁力公式来看,当电磁铁的可动部分运动到行程末段,即δ趋于零时,该灵敏度系数将趋于无穷大,机构变为不可控,即微小的电流变化都会引起电磁力的无限大变化。即使受铁心饱和特性的影响,即在行程末段磁感应强度近似为常数,也会使电磁力变为不可控。因此,灵敏度系数除了能反映结构参数外,还反映了系统的动态特性及系统的可控性。实际上,电磁铁的运动过程还可从控制理论角度进行分析,如图4-65所示。
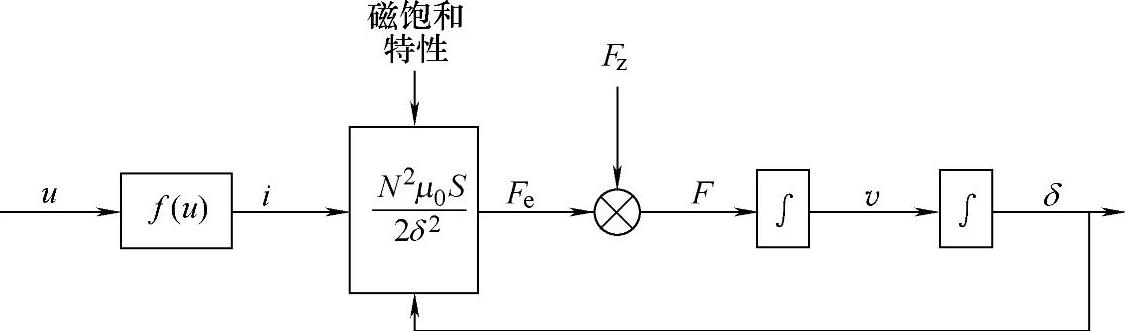
图4-65 电磁铁传动系统框图
图4-65中,u为电源电压,i为线圈电流,f(u)为描述机构电流与电压关系的函数,Fz为反力,Fe为电磁力,F为可动部分受到的合力,v为运动速度,δ为行程。
由图4-65可知,电磁力Fe增大,导致合力F增大,使得行程δ减小,而δ减小又会导致电磁力 增大,最终导致合力F增大。由此可见,如果不考虑饱和问题,电磁铁机构本质上构成了一个正反馈系统,这将最终导致运动过程的不可控。灵敏度系数
增大,最终导致合力F增大。由此可见,如果不考虑饱和问题,电磁铁机构本质上构成了一个正反馈系统,这将最终导致运动过程的不可控。灵敏度系数 与行程的二次方成反比,是致使该机构成为正反馈的主要原因。
与行程的二次方成反比,是致使该机构成为正反馈的主要原因。
另一方面,假设某电磁机构是关于行程的负反馈系统,即当电磁力Fe增大时,导致合力F增大,使得行程δ减小,而δ减小又会导致电磁力Fe增大,最终导致合力减小,也会造成在行程δ很小时,其灵敏度系数很小而使得系统仍不可控。
因此,设计合理的电磁机构,使其本身不致形成正、负反馈系统,或者使其电磁力灵敏度系数基本保持不变,是实现电磁机构可控的一个前提条件。
4.3.2.2 电磁力灵敏度比较
对电动机机构而言,目前已经形成一套成熟完整的分析方法,下面将不再对其电磁力灵敏度进行分析,而主要针对盘状推斥型、音圈电机式和反绕嵌套式电磁机构进行电磁力灵敏度的比较分析。
1.盘状推斥型电磁机构
铜盘—线圈式推斥型机构的电磁力,可由4.2.1节中式(4-21)得到,即 。式中,电磁力不仅与线圈电流i0有关,还与铜盘感应涡流i1p有关,无法根据前文的定义进行电磁力灵敏度分析。实际上,由式(4-17)可知,该感应涡流与线圈电流有确定的函数关系,但较为复杂。为方便起见,以线圈—线圈式推斥型电磁机构为例进行分析。将铜盘换成可动线圈,并将固定线圈和可动线圈串联,则电磁力计算公式变为
。式中,电磁力不仅与线圈电流i0有关,还与铜盘感应涡流i1p有关,无法根据前文的定义进行电磁力灵敏度分析。实际上,由式(4-17)可知,该感应涡流与线圈电流有确定的函数关系,但较为复杂。为方便起见,以线圈—线圈式推斥型电磁机构为例进行分析。将铜盘换成可动线圈,并将固定线圈和可动线圈串联,则电磁力计算公式变为

式中,i0为串联后流过两个线圈的电流,其他符号含义与式(4-21)一致。(https://www.daowen.com)
根据式(4-59)的定义,电磁力灵敏度系数为

由式(4-62)可知,该机构的电磁力灵敏度系数,为两个盘状线圈中每匝互感Mmp对其相对距离x的导数之和。若参考第2章给出的结构参数,将固定线圈与可动线圈的半径均取39mm,经计算得其灵敏度曲线如图4-66所示,最大值约为c1=5.2×10-4。
由图4-66可知,该机构的电磁力灵敏度为时变曲线,且在运动开始,即两个盘状线圈相距很近时,灵敏度很高,而随着运动距离的增加,灵敏度越来越低。正如4.3.2.1节中的分析,该型机构的灵敏度系数表明其本身为正反馈系统,这使得电流对电磁力的控制能力越来越小。
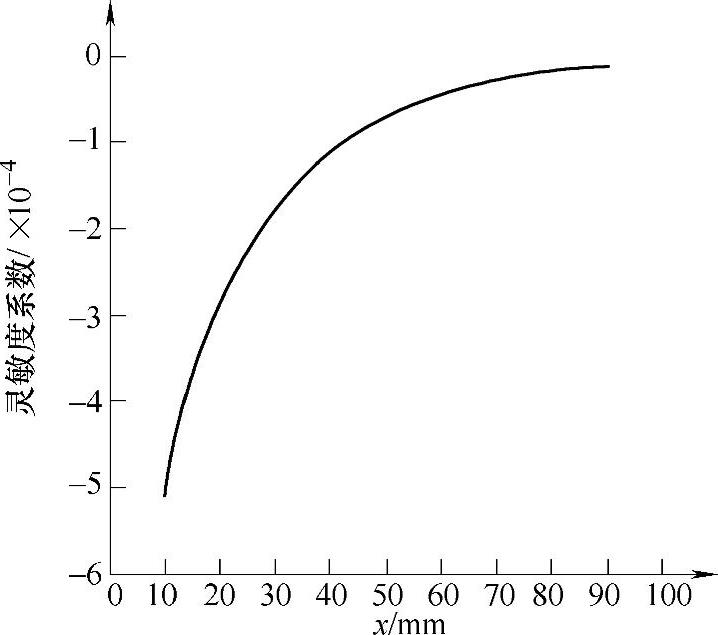
图4-66 盘状推斥型电磁机构(线圈—线圈式)灵敏度曲线
2.反绕嵌套螺线管式电磁机构
根据式(4-51)可知,该型机构的电磁力为Fe=i2k,其中,k为空间相互作用系数,k=n2l2Ce/h2,其他符号含义同式(4-51)。由式(4-59)求得其电磁力灵敏度系数为

其灵敏度系数即为相互作用系数k,等于常数。为便于比较,根据盘状推斥型电磁机构(线圈—线圈式)的参数,保持用铜量和电阻一致,取内线圈直径为44mm,外线圈直径为52mm,则可做成单匝线圈截面为1mm×10mm共8匝、线圈高度为80mm的反绕嵌套螺线管式电磁机构。利用4.2.3节提出的相互作用系数计算方法,可以得到该型电磁机构的灵敏度系数为c1=k=2.56×10-4,约为盘状推斥型电磁机构(线圈—线圈式)灵敏度系数最大值的一半,但在运动过程中保持不变,因此利于实现该机构动态过程的优化分析与控制。
以上两型电磁机构的灵敏度系数都比较小,其主要原因是没有导磁铁心,磁场的利用率较低,但可通过参数优化以提高灵敏度系数。
3.音圈电机式电磁机构
根据4.2.2节中式(4-37b),可得该型机构的电磁力为Fe=Bil,由定义式(4-60)得到其电磁力灵敏度系数为

式中,B、l含义同式(4-37b)。
为便于比较,取与上反绕嵌套式电磁机构相同的参数,且取B=1T,则其灵敏度系数为c2=Bl≈1.2。该数值与其他两种电磁机构相比较大,原因是该型机构在拓扑上能更加有效地利用铁心约束磁场,但因存在磁饱和现象,限制了驱动电流的提高。
根据式(4-59)和式(4-60),具有两类灵敏度系数的电磁机构电磁力分别为Fe1=i2c1和Fe2=ic2。假设该两类电磁机构的电流保持一致,则令Fe1≤Fe2,得到
i2c1≤ic2 (4-65)
求解式(4-65)可得

由式(4-66)可知,理想情况下,电流绝对值在(0,c2/c1)区间内,则第二类电磁机构电磁力的绝对值大于第一类机构,但电流的提高同时也会受到机构材料的限制,因此,实际进行拓扑设计时尚需综合考虑各种影响因素,以获得符合设计要求的电磁机构拓扑。另外,对同一类型的电磁机构,灵敏度系数越大,说明同样大小的电流产生的电磁力越大,控制愈加灵敏。
根据上述基于电磁力灵敏度系数的具体分析,针对三种拓扑类型的比较结果见表4-11。表中的数值大小,是在保持线圈用铜量和电阻一致的情况下得出的,具体可参见4.3.2.2节的正文内容。
表4-11 三种拓扑类型的电磁力灵敏度比较
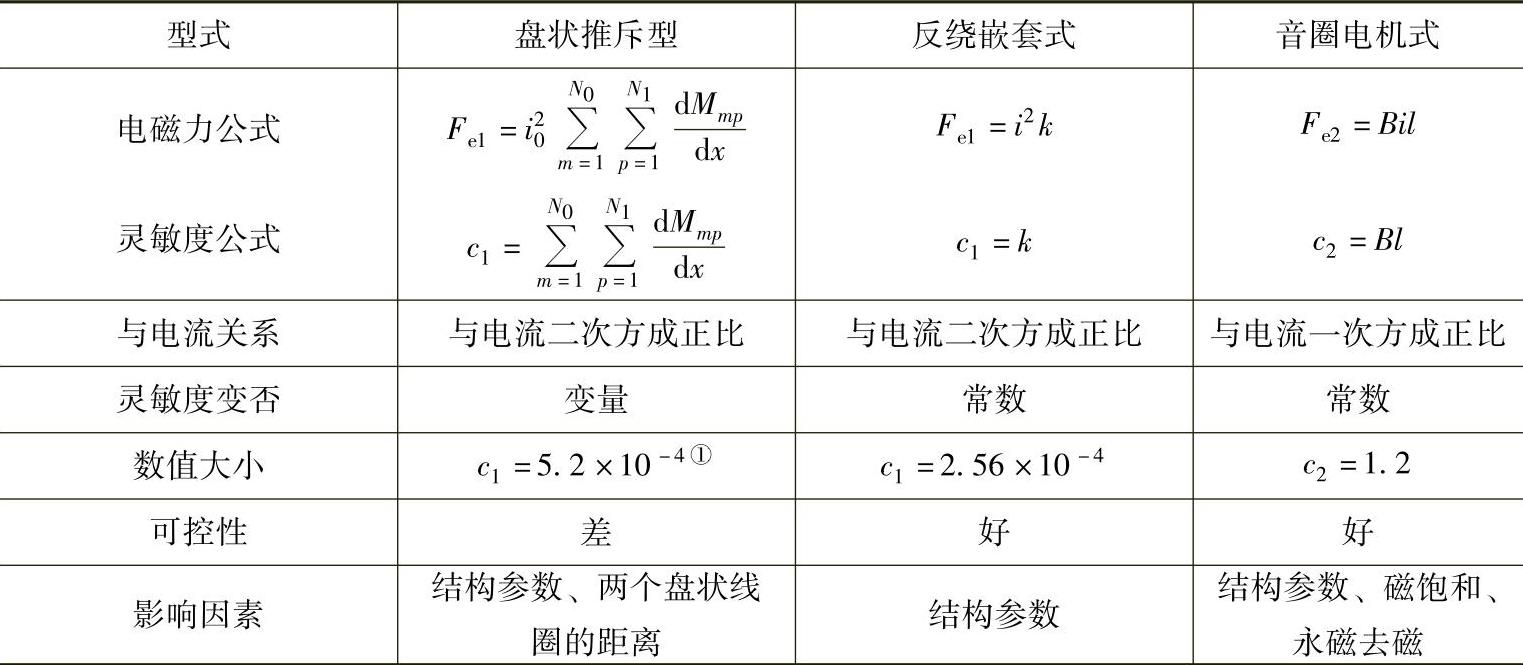
①为该型机构灵敏度系数最大值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




