前面研究的音圈电机式电磁机构,主要由永磁体、线圈和铁心构成,结构简单,可控性好,但因需要铁心和永磁体等非线性材料,当线圈中的电流很大时,会出现磁饱和和退磁等不利问题。电动机操动机构具有控制准确和动作分散性小等优点,但也存在动作时间较长、控制方法复杂以及需要特殊的稳态保持机构等问题。盘状推斥型电磁机构利用两个平板状线圈(或平板线圈与铜盘)之间产生斥力而实现驱动,其电感和时间常数小,可在极短时间内由电容放电产生很大的脉冲电磁力,具有动作速度快、时间分散性小等优点,但因动作速度太大引起的碰撞振动问题尤其突出,需要较复杂的缓冲机构,且其动作过程的可控性较差,不利于实现速度跟踪控制。
事实上,简易而可靠的物理拓扑结构,以及简单而准确的数学分析模型,对实现电磁电磁机构的快速性与可控性至关重要,也是优化结构设计和运动控制的前提基础。
不同于上述几种机构的原理,利用空心线圈具有电感和时间常数均相对较小的优点,基于两个螺线管线圈边缘电磁场的相互作用,提出了一种新型的电磁驱动机构。该机构除具有结构简易可靠的优势外,还具有数学分析模型简单而准确的优点。通过样机实验验证了该机构的有效性,为实现电磁机构的优化设计以及运动过程的可控奠定了基础。
4.2.3.1 机构原理
该新型电磁机构的基本物理拓扑如图4-40所示,它由两组线圈L1与L2构成。其中,可动线圈L1是同一绕向绕制的螺线管线圈a;固定线圈L2包含用一根导线绕制而成的大小相同、绕向相反的线圈b和c。线圈b与线圈a的顶端对齐;线圈c的顶端与线圈a的中线对齐。线圈a底端到线圈c底端的距离即为可动区间。当a、b、c三个线圈流过同一电流时,L1在L2产生的磁场将相互作用而发生竖直方向的相对运动(图中所示为可动线圈L1竖直往上运动)。
这里为分析方便,以L2在L1产生的磁场中受力为例。L1通过电流时将产生图4-41所示的初始磁场分布(仅画出x=0处的yz平面)。对应图4-41所示的磁场分布剖面图,在区域m、区域n内的磁场径向(水平)分量大小与方向如图4-42所示,分别以实线、虚线表示。这样,以z=0为分界面,L1通流后在上、下两个半球区域产生的径向(水平)磁场分量方向相反,且越靠近螺线管线圈a的两个端部,径向(水平)磁场分量越大。因此,分处两个区域的反向串联的线圈b与线圈c将受到同一方向的竖直电磁力(利于快速驱动)。按照图4-40所示的电流方向,L2将受到竖直往下的合力,亦即L1受到向上的电磁力而产生运动。
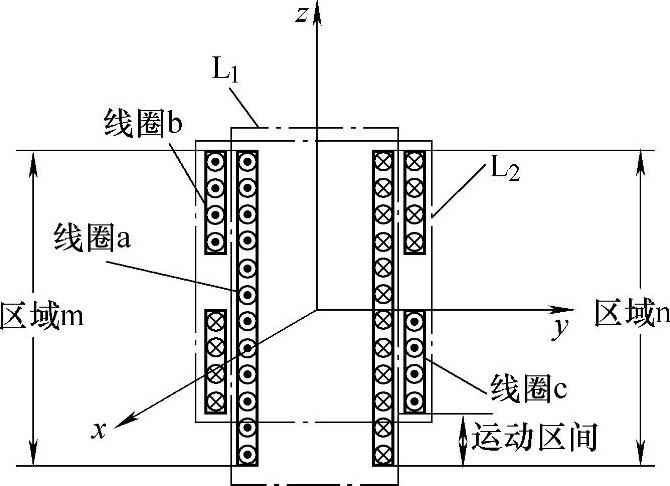
图4-40 电磁机构拓扑示意
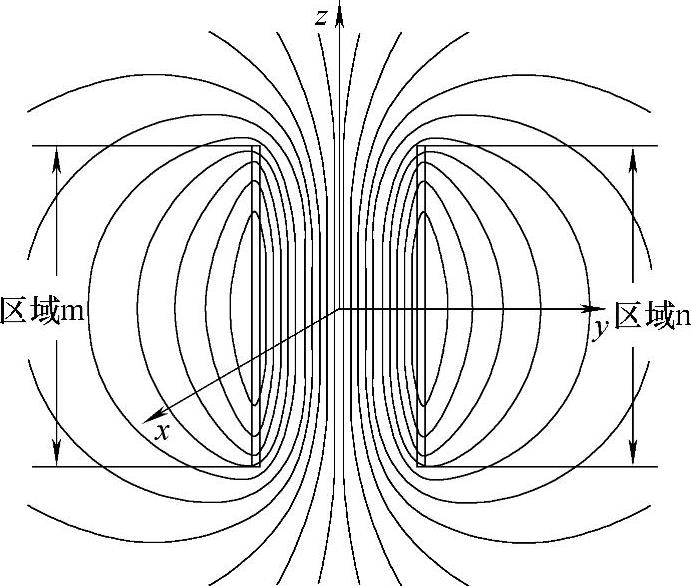
图4-41 线圈L1产生的磁场分布
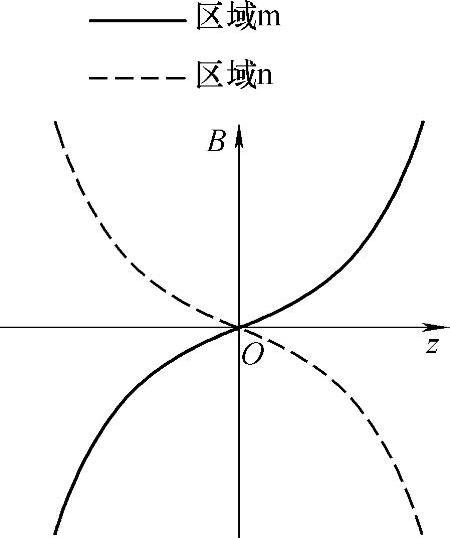
图4-42 沿z轴分布的径向(水平)磁场分量
4.2.3.2 解析基础
1.线圈L1产生的径向磁场
为求解通流多匝线圈在空间任意一点产生的磁感应强度,首先分析单匝通流线圈的情况,建立如图4-43a所示的柱坐标系。单匝通流线圈在空间任一点产生的磁感应强度径向分量计算公式为

式中, ,
, ,
, ,K、E分别为第一类和第二类完全椭圆积分。
,K、E分别为第一类和第二类完全椭圆积分。
对于多匝密绕线圈,则可建立图4-43b所示的柱坐标系。此时式(4-40)中的电流可用电流密度J和线圈轴向微分位移dh来表示,即 。对于空间任意一点由多匝密绕线圈产生的磁感应强度径向分量,由式(4-40)积分可得
。对于空间任意一点由多匝密绕线圈产生的磁感应强度径向分量,由式(4-40)积分可得
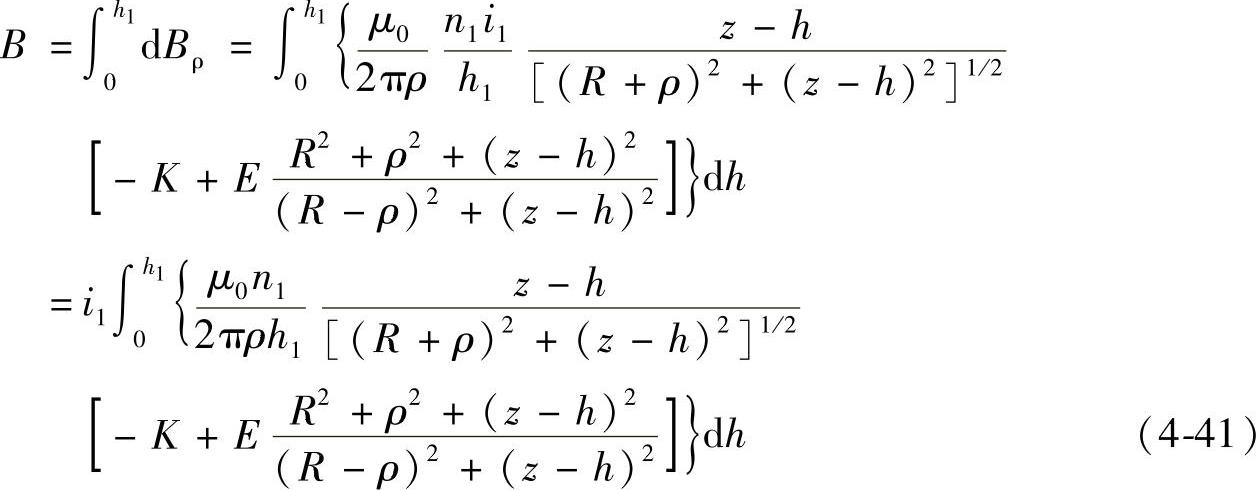
式中,i1、n1、h1分别为线圈L1的电流、匝数和线圈高度。
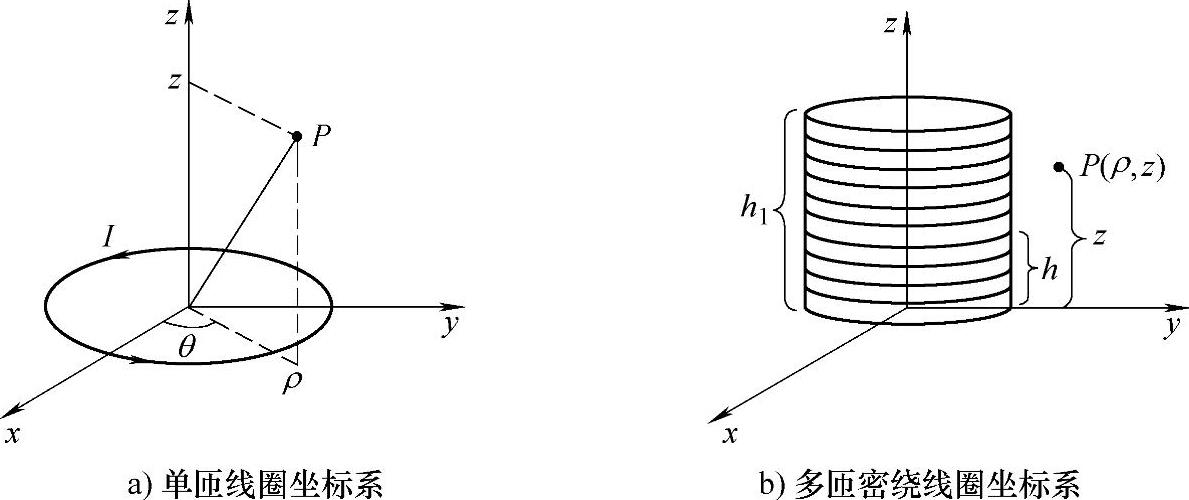
图4-43 磁场分析所用柱坐标系
由以上分析可知,磁感应强度径向分量B只与结构参数有关,即当线圈L1的半径r1、高度h1给定时,任意一点P(ρ,z)处的磁感应强度径向分量B与电流i1成正比。
式(4-41)中含有第一类和第二类完全椭圆积分,解析计算较为复杂,为进一步分析线圈L1的径向磁场分布特性,得出更简洁的数学描述,可采用数值方法。以实际设计的样机参数为例,线圈L1的直径为30mm,长度为96mm,并设电流i1为1(归一化),以线圈轴线为中心,在线圈L1长度范围内计算ρ=50mm处的径向磁场,沿线圈L1的轴向考察三个区间的情况:①0≤z≤10mm;②38mm≤z≤58mm;③86mm≤z≤96mm。
为简化机构的分析模型,可采用一元线性回归分析,获得上述轴向区间内磁感应强度径向分量B与轴向距离z之间的简单数值关系。
设三个区间的回归函数形式均为B=a+bz。由于对称性,对于两个端部区间只考察0≤z≤10mm区间即可。
(1)0≤z≤10mm区间
a0=-3.704×10-5,b0=1.2024×10-3,相关系数γ0=0.98729,即
B=-3.704×10-5+1.2024×10-3z(0≤z≤0.01) (4-42)
(2)38mm≤z≤58mm区间
a1=-1.3058×10-5,b1=2.7175×10-4,相关系数γ1=0.99984,即
B=-1.3058×10-5+2.7175×10-4z(0.038≤z≤0.058) (4-43)
由式(4-42)、式(4-43)及相关系数表明,在线圈L1的轴向长度范围内,两个端部及中间区域的B与z线性相关度很高,可近似认为其与轴向距离z成线性关系。
2.运动过程中穿过线圈L2的总径向磁场
该机构的精确分析涉及电磁耦合、机械运动等问题,是一个变参数的非线性系统,一般需进行复杂的电磁场计算。但根据4.2.3.2节“1.线圈L1产生的径向磁场”的分析,线圈L1产生的磁场径向分量具有对称性(关于z=h1/2对称,但符号相反),且在两个端部及中间区域的径向磁场分布可线性化处理,这使得分析大为简化。如图4-44所示,点划线框代表组成线圈L2的两个反向串联的线圈b与c所处位置,其初始位置分别位于图4-40所示线圈L1的上端部和中线。
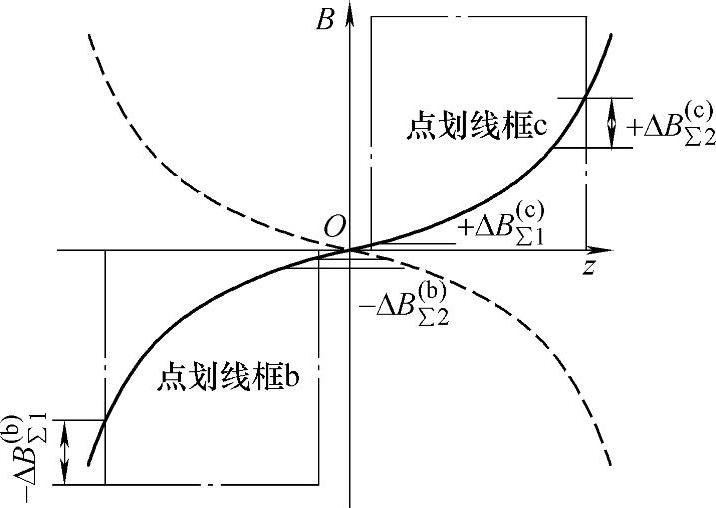
图4-44 运动时垂直穿过线圈L2的径向磁场变化
考虑到组成L2的两个线圈b、c的绕向相反,对式(4-41)积分可得到穿过线圈L2的磁场径向分量总和为
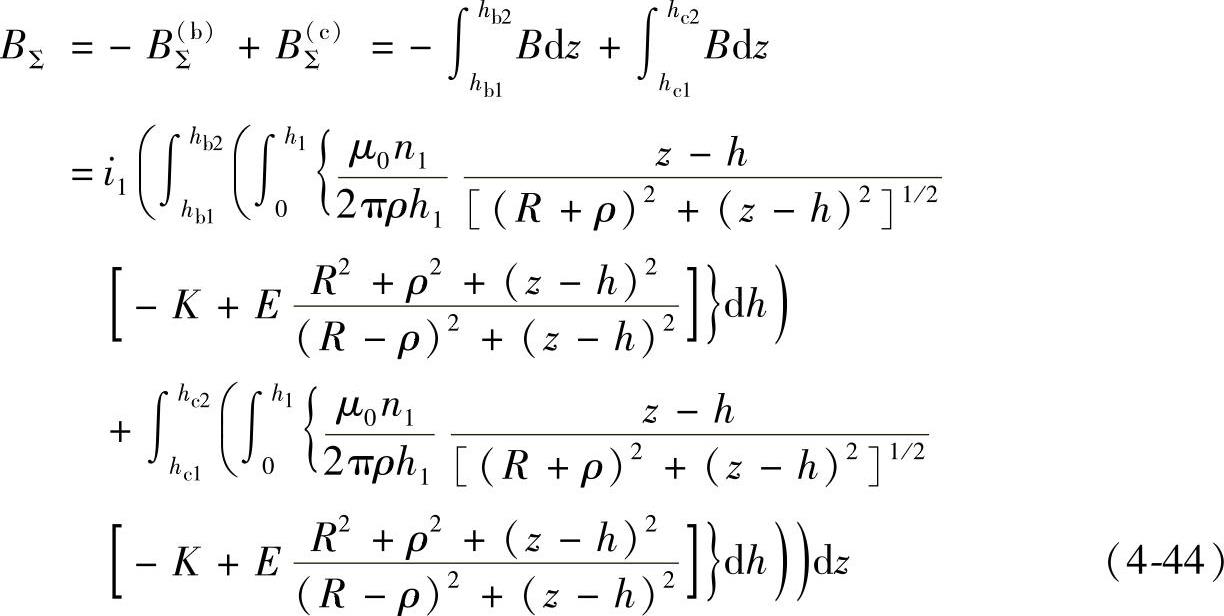
式中,BΣ表示穿过线圈L2的磁场径向分量总和;上标(b)、(c)分别对应于组成L2的线圈b和c;hb1、hb2与hc1、hc2分别为线圈b、c的上下两端部的坐标值;i1为线圈L1的电流;n1、h1、K、E、k2的意义同式(4-41)。
运动时,穿过线圈b、c的磁场径向分量的总变化量分别为

这里,下标1、2则表示线圈b或c的上、下两端部。
鉴于磁场分布的对称性,以及对螺线管两个端部及中间区域磁场的线性化处理,则有如下关系:

因此,可得运动时穿过L2的磁场径向分量总变化量为ΔBΣ,即

式(4-47)表明,由线圈L1单位电流产生的垂直穿过线圈L2的磁场径向分量总和BΣ,在运动过程中近似保持恒定,即式(4-44)中等号右边除去电流i1外的定积分为常数,可记为Ce。因此式(4-44)可改写为
BΣ=i1Ce (4-48)
3.等效分析模型
根据能量守恒,系统向可动线圈输入的能量,即电磁力F(t)所做的功,转化为可动线圈的动能1mv22和克服摩擦力f(t)等所做的消耗功。可动线圈L1的受力分析如图4-45所示。
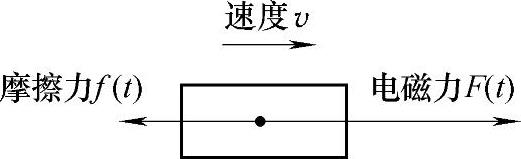
图4-45 可动线圈L1受力分析
由图4-45可知,ma=F(t)-f(t),其中m为可动线圈的等效质量。则速度为

当线圈密绕时,L2(包括线圈b和c)所受电磁力可用下式表示为

式中,i2、n2、h2、l2分别为L2的电流、匝数、长度以及每匝线圈的周长;B、BΣ的意义分别与式(4-41)、式(4-48)相同。
将式(4-48)代入式(4-50),可得

由于线圈L1和L2通入同一电流,即i1=i2=i,则
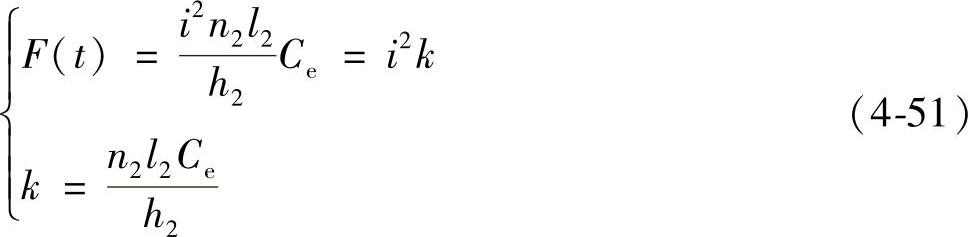
k是一个只与机构拓扑结构有关的常数,为此,将其定义为线圈L1和L2的空间相互作用系数。若线圈的运动速度为v,则电磁功率为
p(t)=i2kv (4-52)
空间相互作用系数的定义表明,针对该种机构,其运动过程的电磁力与电流的二次方成正比,即线圈L1和L2之间的耦合关系可用一个常数来简单表示,而其值可根据机构的几何拓扑经计算事先得到,这大大简化了由电磁场来计算复杂电磁耦合关系的过程,为机构参数的优化、机构控制器的设计以及运动过程的实时控制提供了理论基础。
将式(4-52)的表达式与一般电阻功率表达式对比可知,机构的运动特性可用一个等效电阻来表示,即
R′=kv (4-53)
该机构的运动行程与螺线管长度相比一般较短,如实验样机,其行程(5.5mm)只占线圈总长度(96mm)的5.7%;再者,该机构中线圈b、c与线圈a的空间布置属于差动结构,因此,L1与L2之间的总电感L在整个运动过程中变化不大,实测结果也证实了这一点。后文计算时取最大电感和最小电感的平均值。
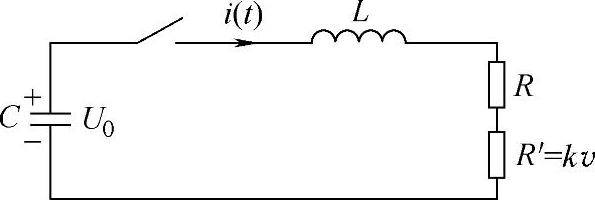
图4-46 机构运动的等效分析电路
由于该机构的动态模型可简化为一个与速度大小成正比的电阻R′=kv,因此,当由电容放电回路来提供机构的驱动电流时,其过程可用一个R-L-C放电回路来描述,如图4-46所示。其中,R、L、C分别表示放电回路电阻、电感及电容,i(t)为回路的放电电流,U0为放电电容的初始电压。
令RΣ=R+R′=R+kv,并根据uL=L di/dt,由图4-46可得回路微分方程为(https://www.daowen.com)

式中,速度v由式(4-49)确定。计算时,对式(4-49)和式(4-54)进行离散化,可得到数值方程组(4-55),由此可求解该电磁机构的运动特性。

4.2.3.3 数值仿真与样机实验
根据前文建立的电磁机构数学模型,针对具体设计的实验样机进行仿真计算。具体机构参数如下:
线圈a(组成线圈L1)的直径为30mm,长度为96.2mm;线圈b、c(组成线圈L2)的直径为50mm,长度均为37mm;线圈及回路总电感的最大、最小、平均值分别为20.7μH、19.7μH、20.2μH;回路总电阻为0.16Ω,放电电容为190μF;可动线圈的等效质量为280g;运动行程为5.5cm;实验测得摩擦力约为1.1N。
1.仿真结果
根据式(4-51)可求得机构的空间相互作用系数k=5.192×10-5,测得回路电感平均值为20.2μH。将机构的其他相关参数代入方程组(4-55),可得到如下仿真计算结果:U0=3000V时,完成5.5mm行程约需要5.75ms,其电流、运动速度和行程波形分别如图4-47~图4-49所示;U0=4000V时,完成5.5mm行程约需要3.28ms,其电流、运动速度和行程波形分别如图4-50~图4-52所示。

图4-47 电容电压3000V时的驱动电流
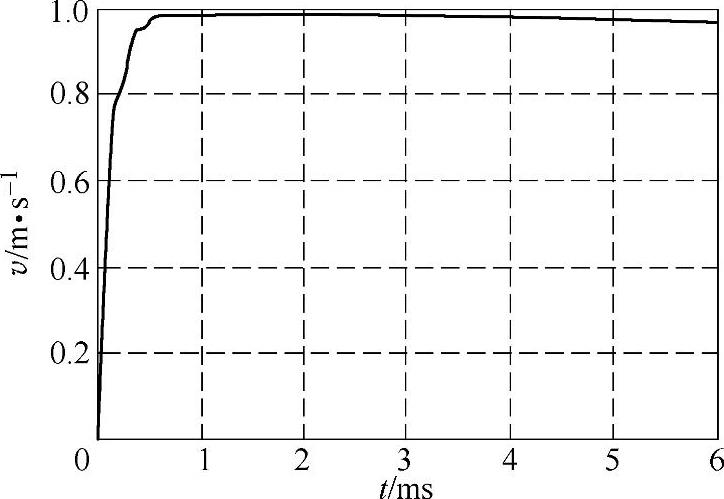
图4-48 电容电压3000V时的运动速度
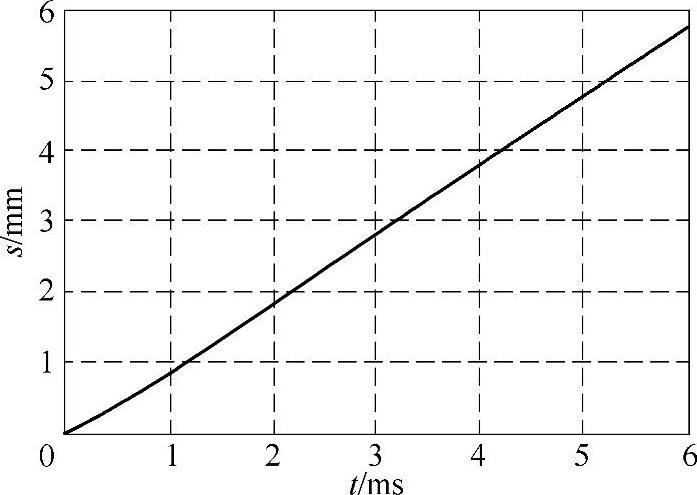
图4-49 电容电压3000V时的行程变化

图4-50 电容电压4000V时的驱动电流

图4-51 电容电压4000V时的运动速度

图4-52 电容电压4000V时的行程变化

图4-53 新型电磁机构的实验样机
2.实验结果
设计的样机实物和实验测试平台如图4-53和图4-54所示,实验时测取电流波形和完成5.5mm行程所需的时间。主回路由充电电容、真空断路器、反绕嵌套螺线管式电磁机构、分流器组成。电压由电容式分压器进行测量;电流测量由分流器完成;而行程时间T,则采用YD-81振动传感器测量机构的起始碰撞时刻来间接确定。
U0=3000V时,完成5.5mm行程约需要5.82ms,其放电电流(标识2)和振动信号波形(标识3)如图4-55所示;U0=4000V时,完成5.5mm行程约需要3.34ms,其放电电流(标识2)和振动信号波形(标识3)如图4-56所示。

图4-54 新型电磁机构的测试平台
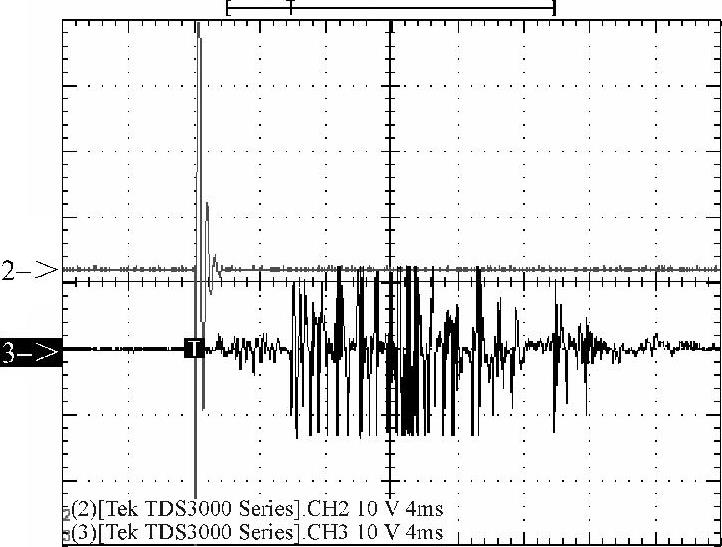
图4-55 电容电压3000V时的放电 电流及振动信号
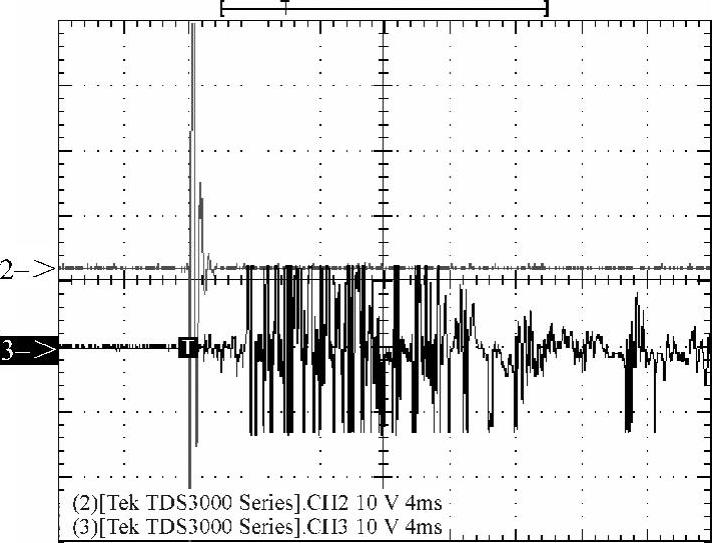
图4-56 电容电压4000V时的放电 电流及振动信号
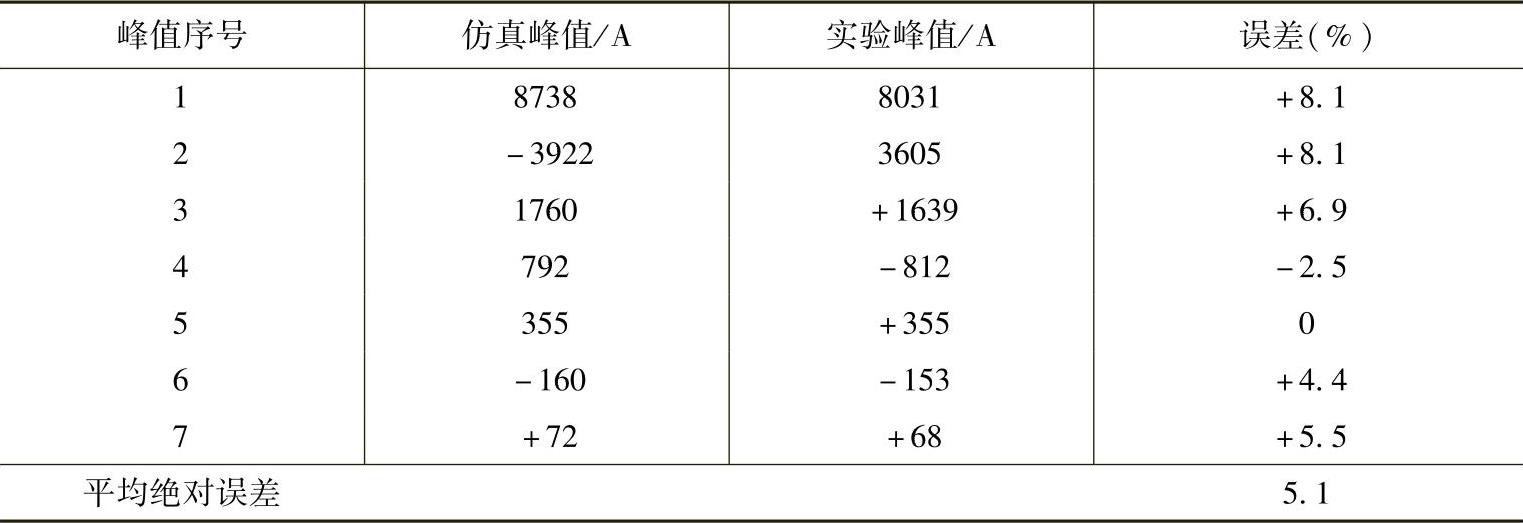
仿真与实验结果的对比见表4-8~表4-10,放电电流峰值的最大相对误差在10%左右,运动时间的相对误差在2%以内。表4-9和表4-10中的数据,是从放电起始算起的共7个波峰和波谷值的对比。究其误差来源,主要来自于简化模型本身的误差、实验测量误差以及机构运动过程中摩擦力引入的误差等。但这些误差很小,仿真与实验结果能够较好地吻合,表明所建立的结构数学模型是正确有效的。
表4-8 行程时间对比

表4-9 电容电压3000V时的电流峰值对比
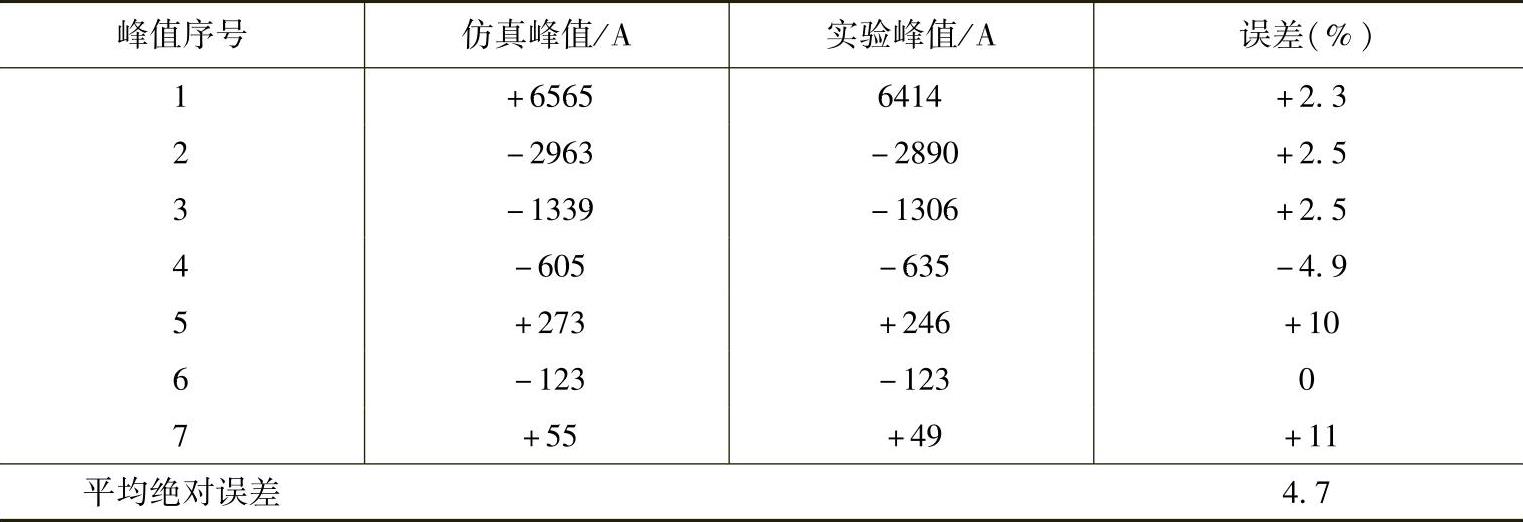
表4-10 电容电压4000V时的电流峰值对比
4.2.3.4 速度跟踪控制策略及仿真分析
若将可动线圈L1和固定线圈L2串联放电,则由式(4-51)可知,在运动过程中电磁力将一直保持正值,使机构始终处于加速状态,而无法进行减速。欲实现运动速度的跟踪控制,必须将可动线圈L1和固定线圈L2分别接入两个放电回路,以产生反向电流并形成减速电磁力。系统运动方程可由式(4-56)描述。
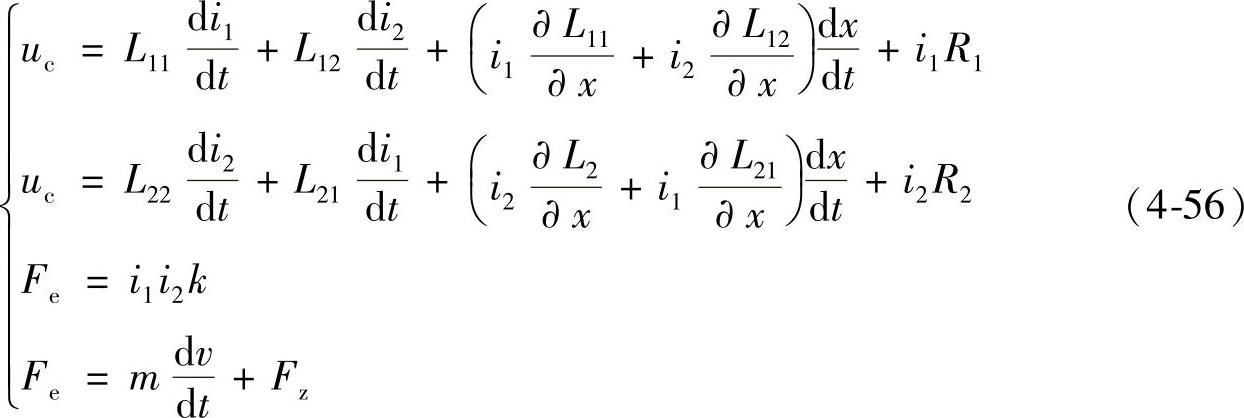
式中,uc为电容电压;i1、R1、L11分别为可动线圈回路的电流、电阻、自感;i2、R2、L22分别为固定线圈回路的电流、电阻、自感;L12、L21分别为可动线圈与固定线圈的互感,L12=L21;k为相互作用系数;Fe为电磁力;Fz为反力;x、v分别为行程和速度。
根据前文对该机构拓扑的分析,L12=L21≈0, =0,
=0, =0;同时,由前述的分析,易证明
=0;同时,由前述的分析,易证明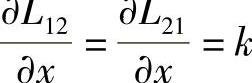 。因此,式(4-56)可简化为
。因此,式(4-56)可简化为
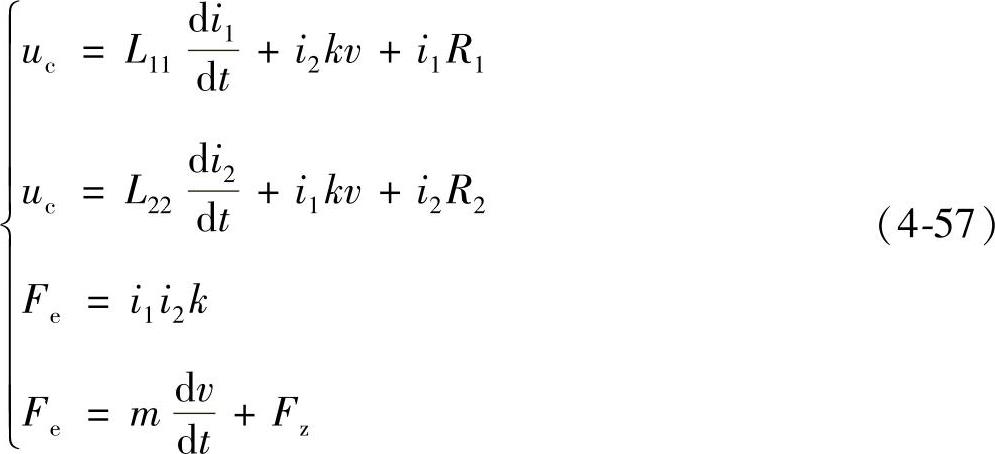
式(4-57)即为描述该型电磁机构的动态方程组,据此可搭建其动态运动过程的仿真模型,其中两个放电回路的耦合作用可分别用两个可控电压源等效,固定线圈回路对可动线圈回路的耦合作用可等效为电压源ucontrol12=i2kv,可动线圈回路对固定线圈回路的耦合作用可等效为电压源ucontrol21=i1kv。
由于涉及两个放电回路,则实现速度跟踪控制的主回路方案可有三种:①L1和L2分别接入两个单相H桥式主回路,由各自的放电电容进行放电;②其中一个接入单相H桥式主回路,另外一个接入自由放电回路,分别由各自的放电电容进行放电;③L1和L2所在主回路使用同一个放电电容,其中一个回路为单相H桥式主回路,另外一个为自由放电回路。

图4-57 速度跟踪控制主回路原理图
为降低控制复杂性并减少主回路器件数量,选用第三种控制方案,如图4-57所示。图中,L1为可动线圈,R1为L1的回路电阻;L2为固定线圈,R2为L2的回路电阻;C为放电电容。
根据前文的理论分析与建模方法,基于PSIM构建了该型电磁机构分闸运动特性的控制仿真系统,如图4-58所示。

图4-58 反绕嵌套螺线管式电磁机构的动态特性仿真系统
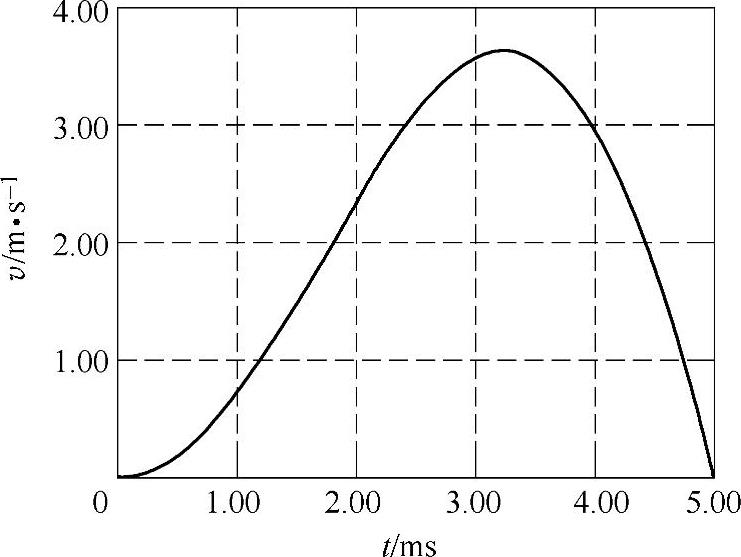
图4-59 给定的分闸运动速度曲线
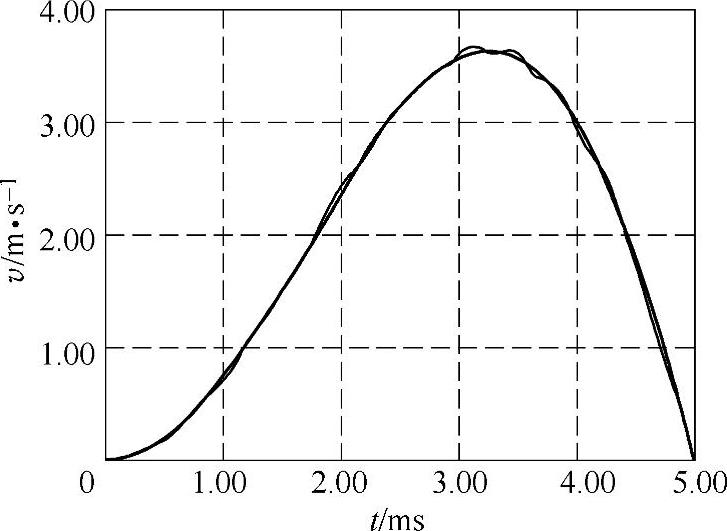
图4-60 给定与实际运动速度曲线的比较(波动曲线为实际运动曲线)
设给定的真空开关分闸运动最优速度曲线如图4-59所示,以此作为电磁机构的速度跟踪控制目标。仿真时参数设计为:运动部分质量m=1kg,运动行程为10mm;放电电容C为10000μF,充电电压为800V;L1直径为5.2cm,长度为8cm,线圈匝数为80,其回路电感为210mH,电阻为0.11Ω;组成L2的两个反绕线圈直径为4.4cm,单个长度为3cm,单个线圈匝数为30,其回路总电感为100mH,电阻为0.07Ω。
以图4-59所给定的速度曲线作为参考目标,利用图4-58构建的仿真系统,对电磁机构的动作特性进行仿真分析,结果如图4-60~图4-63所示。
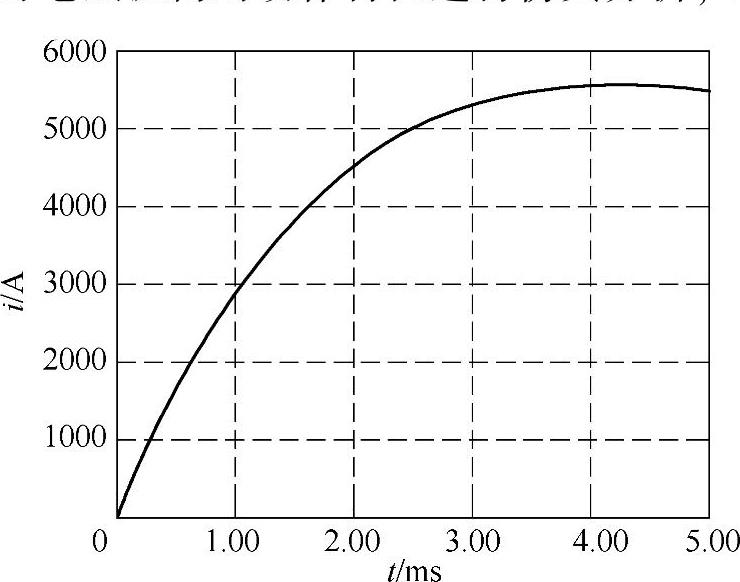
图4-61 线圈L1回路放电电流曲线
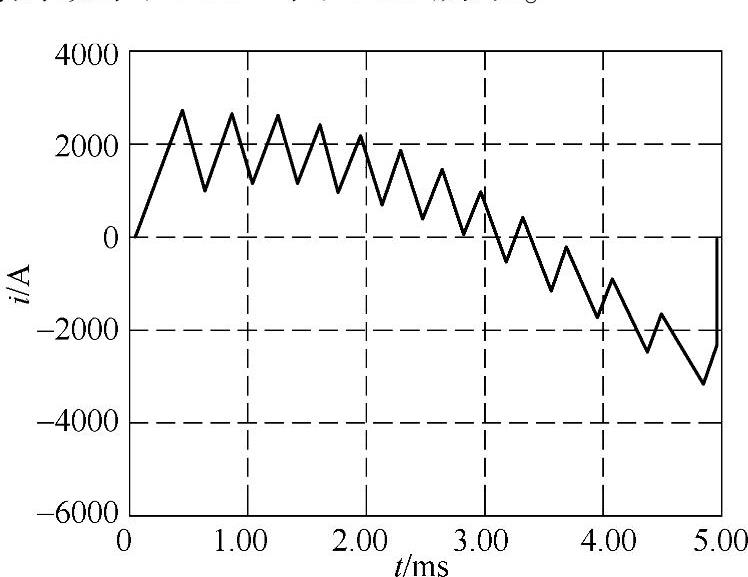
图4-62 线圈L2回路受控放电电流曲线
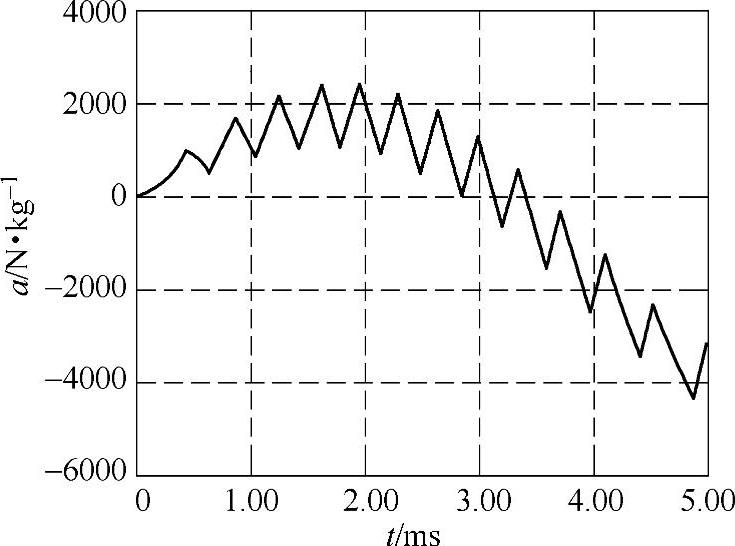
图4-63 机构运动加速度曲线
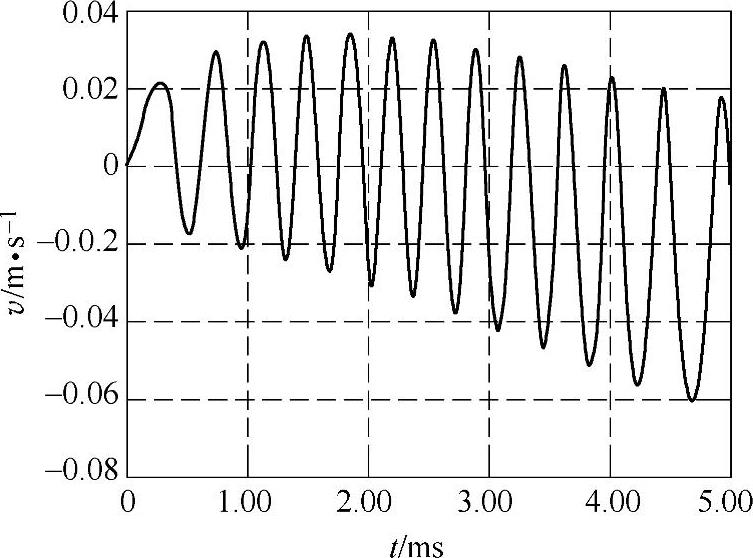
图4-64 机构运动速度跟踪控制的误差曲线
由仿真结果可知,为提高机构的动作快速性,需提供较大的脉冲电磁力;同时,为实现速度的最优跟踪控制,亦需在运动过程中通过控制L1线圈的主回路将该回路电流反向,以提供机械缓冲所需的较大脉冲电磁力。
机构运动结束时线圈内仍有较大的剩余电流,倘不采取有效措施释放电感能量,则会造成触头在反向电磁力的作用下产生更大反弹,甚至可能导致分闸失败。因此,临近运动结束时,提前控制线圈放电回路导通,以快速释放能量使电流到零,并充分利用双稳弹簧在半行程后变阻力为驱动力的特点,可解决该极短过程的电磁缓冲问题,具体可参见图4-62和图4-63所示曲线的末端。仿真结果还表明,倘采取4.2.2节中所述策略,在4.9ms时触发串联有400Ω电阻的放电旁路导通,则行程结束时动触头的运动速度可以控制到很小值,小于0.1m/s。此时触头的残余动能较小,约为0.025J,几乎不会发生碰撞。整个过程中速度跟踪控制的效果较好,速度跟踪最大误差约为0.06m/s,如图4-64所示。
4.2.3.5 小结
基于螺线管线圈边缘电磁场的相互作用,提出了一种新型电磁机构的空间拓扑,并研制了实验样机。针对该电磁机构的磁场分布情况,证明可利用安培力公式来简化电磁力的计算过程,大大简化了数学分析模型;提出空间相互作用系数的定义,来描述可动线圈L1和固定线圈L2之间的耦合关系,为该电磁机构的优化设计和运动过程的实时控制奠定了理论基础。
仿真计算与样机实验结果符合较好,表明所建数学分析模型的有效性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





