随着永磁材料和加工工艺的发展,目前我国已能制造强剩磁、形状复杂的永磁体。根据需要设计具有一定空间结构的永磁体,可产生利于实现快速电磁机构动态控制的磁场分布;再与可控脉冲放电相结合,可保证电磁机构动作的快速性和准确性。因真空开关的动触头行程相对较小,易于实现快速操作,以其作为应用对象,提出一种用于真空开关的音圈电机式快速电磁机构。该机构与传统配永磁体的电磁机构有较大不同:在结构上,永磁体只提供均匀磁场,从而降低了复杂的磁场计算;在驱动上,则利用对螺线管线圈进行可控脉冲放电来提供动力,并通过反馈调节与电磁缓冲,实现合分速度的跟踪控制和触头的零碰撞振动。由于其兼具可控脉冲放电的快速性、类似电动机的完全可控性以及力学特性简单等优点,利于实现触头快速分、合闸动作特性的优化控制。
4.2.2.1 音圈电机式快速电磁机构
该新型电磁机构的结构原理如图4-28所示,它主要由导磁铁心、筒状永磁体、可动线圈以及双稳弹簧保持机构组成。其工作机理是基于通电线圈在磁场中受到安培力作用而推动动触头运动。近似恒定的对称磁场分布由永磁体产生,线圈电流由专用可控放电电源提供。由于永磁体在低频工况下的相对磁导率接近于1,可以显著降低线圈电感量,增大电流上升率,利于实现动作快速性。为保持真空开关的分、合闸稳定状态,仍然采用第4.2.1.4节中提出的稳定性好、力学特性简单的双稳弹簧保持机构。线圈通电流后因安培力作用而驱动触头运动,到达分、合闸位置时,双稳弹簧保持一定的弹簧力以维持稳定状态。
实际上,该电磁机构在拓扑上是一种差动补偿结构,即当线圈向上运动时与下端部铁心距离变大、电感变小,同时与上端部铁心的距离却变小、电感变大;向下运动时亦是如此,即运动中总是保持与两端部铁心的距离之和不变。理论上,当铁心材料和形状一定时,若电感量与位移在推力机构行程范围内成线性关系,则采用差动补偿结构的线圈电感可保持不变。对直径为8cm、高度为10cm、线径为1mm2的线圈及安装在两端的铁氧体,测量不同相对位置的电感值,结果见表4-6和表4-7。由表可知,采用差动补偿结构,能有效补偿线圈在运动中电感的变化。
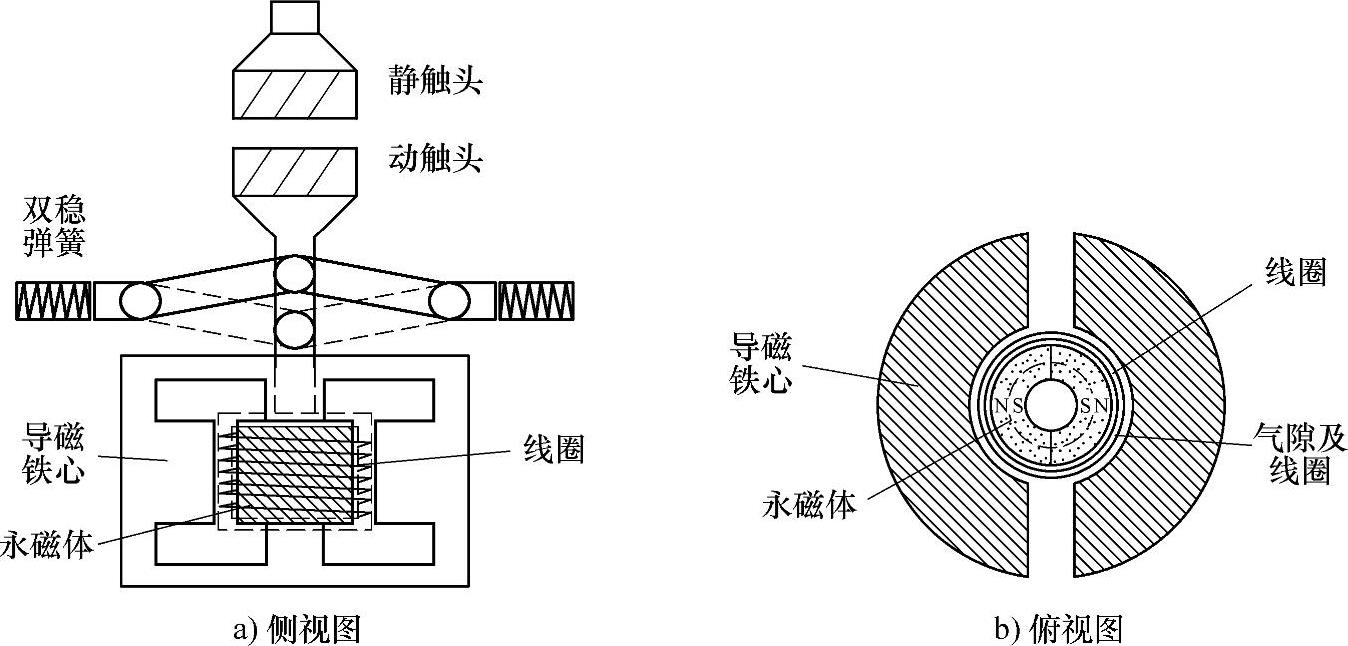
图4-28 音圈电机式推力机构结构原理图
表4-6 采用差动补偿结构与非差动补偿结构时线圈电感随位移的变化
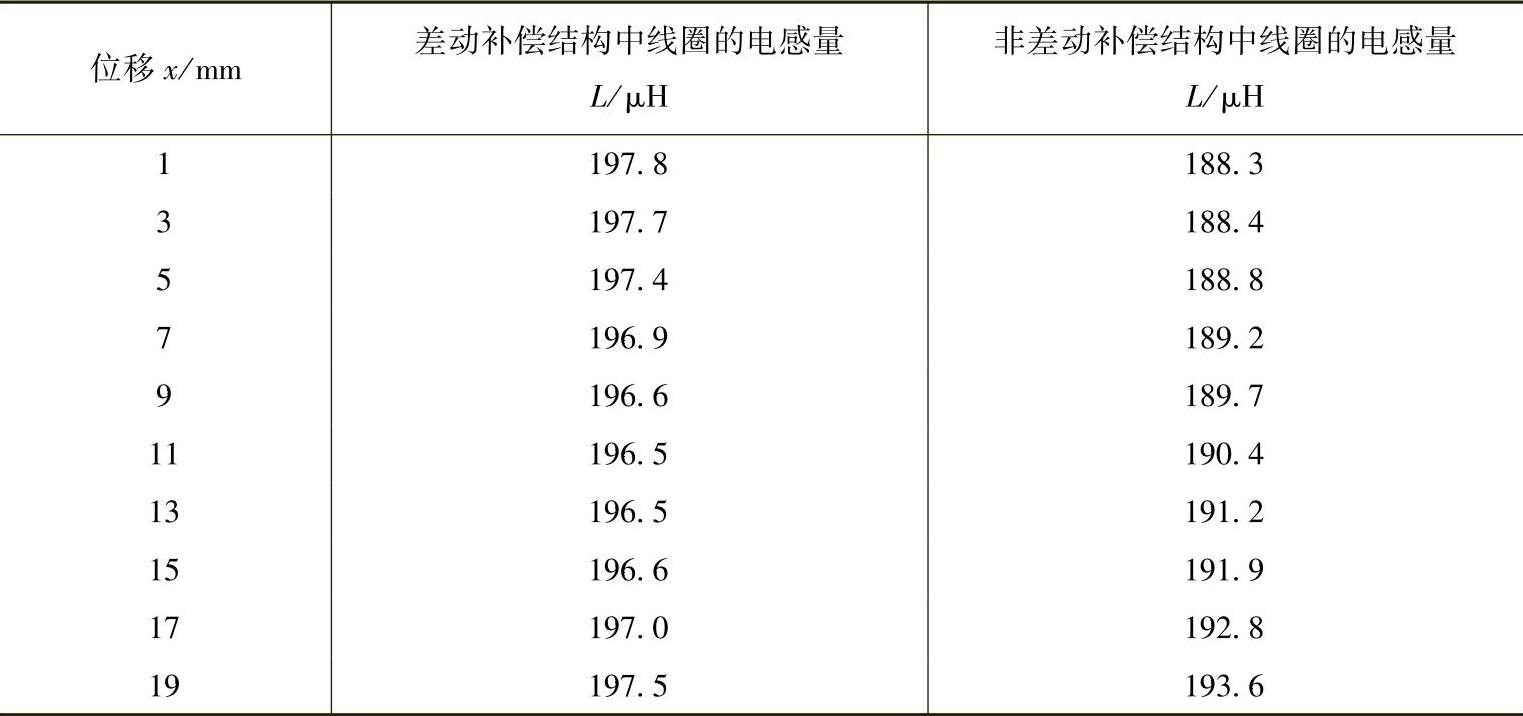
表4-7 两种结构的相对误差比较

注:差动补偿结构为两端皆有铁氧体,非差动补偿结构为单端具有铁氧体。
4.2.2.2 电磁机构的数学描述
该电磁机构在运动过程中由于磁场近似恒定(下面另有叙述),可简化为图4-29所示的等效电路。
该电磁机构的动态特性可用如下方程组描述:
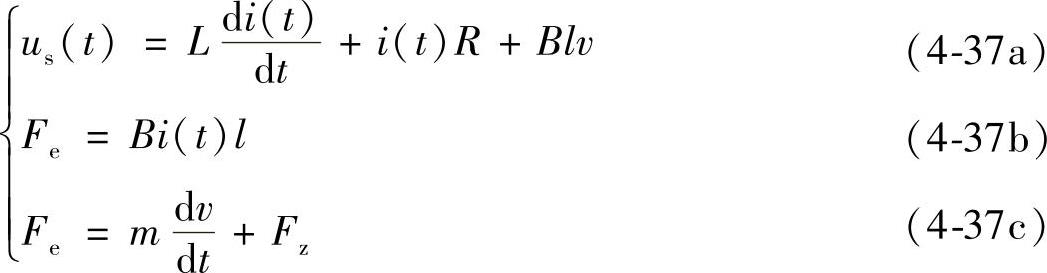
式中,式(4-37a)、(4-37b)和(4-37c)分别为电压方程、电磁力方程和动力学方程;i(t)为回路电流,L为线圈电感,R为回路电阻,m为可动部分归算到动触头上的归一化质量,v表示可动部分的运动速度,Fe为电磁力,Fz为阻力,B、l分别表示永磁体所产生的磁感应强度和线圈绕线总长度。
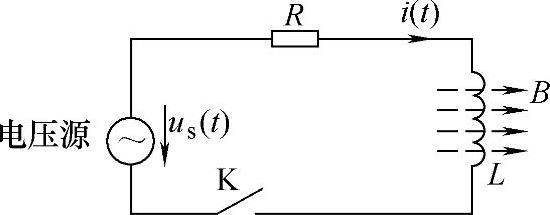
图4-29 R-L回路
根据式(4-37)可得到描述该电磁机构动态过程的框图,如图4-30所示。
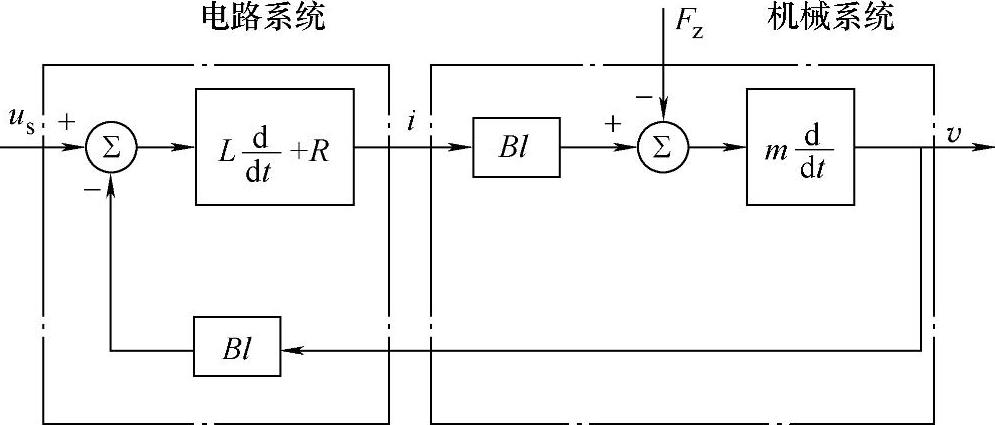
图4-30 音圈电机式快速电磁机构的框图

图4-31 音圈电机式快速电磁机构的等效分析回路
由式(4-37)及图4-30可知,该电磁机构实质上由电路系统和机械系统通过电磁力耦合构成的反馈系统。而且,机构的动态运动过程可等效为一个包含在R-L-C充放电回路中的受控电压源,如图4-31所示。受控电压源电压ucontroled=Blv,受机构可动部件运动速度控制,与速度成正比。基于该等效电路,可以简化相关计算,易于构建电磁机构运动特性的仿真分析与控制模型。利用电力电子技术,对机构实施脉宽调制(PWM)控制,即可实现对电磁机构运动特性的优化控制。
4.2.2.3 速度跟踪控制策略
为综合分析音圈电机式快速电磁机构的速度跟踪特性,将保持机构和电磁机构联合进行计算仿真。
通过4.2.1.4节的分析可知,双稳弹簧在垂直方向上的分力fz为

式中,fc为拉杆处于水平位置时弹簧的弹力;l0为拉杆长度;k为弹簧的弹性系数;x为动触头位移;lae为e和a两点之间的距离,等于触头行程的一半。
式(4-38)中方括弧内的第二项,表示因弹簧被拉长使弹簧力减弱的部分。则整个运动过程中,机构运动部分所受到的力由电磁力、弹簧力和重力组成,因此可写出力学方程式为
FM=Bli(t)+fz(x)-mg(4-39)(https://www.daowen.com)
式中,FM为合力,mg为重力,其他参数同式(4-37)。
根据图4-30、图4-31建立的仿真系统如图4-32所示。
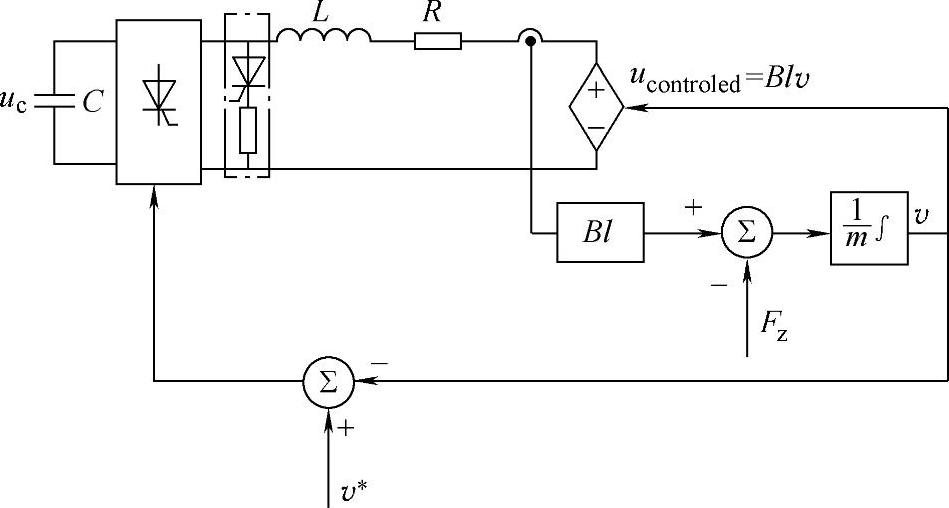
图4-32 速度跟踪控制仿真原理
其仿真过程如下:根据图4-32给出的动态过程框图,电磁与机械系统的耦合关系可用受控电压源描述:ucontroled=Blv;取电路电流信号,经过比例放大器(放大倍数p=Bl)即可得到电磁力Fe=Bil,并与反力Fz构成合力FM;再经过比例放大器(放大倍数为1/m),经积分得到运动速度v;该速度与给定速度信号v*相比较,得到误差控制信号送到PWM控制器,从而完成该电磁机构对速度跟踪控制的仿真。电力电子拓扑的主电路和控制方式分别采用单相逆变桥式电路和PWM控制方式。
理论分析表明,为达到电磁力与受控电流的严格正比性,需要永磁体在机构行程范围内提供上下对称的恒定磁场。利用电磁场计算软件,对图4-28所示机构中永磁体产生的磁场进行了计算,结果表明该机构的磁场分布具有良好的对称特性,完全满足控制要求,如图4-33所示。
4.2.2.4 电磁机构的运动特性仿真
根据前述的理论分析和仿真建模方法,基于PSIM(电力电子仿真软件)构建了电磁机构分闸运动特性的控制仿真系统,如图4-34所示。
考虑到动触头运动速度与灭弧性能之间的关系,设给定的真空开关分闸运动最优速度曲线如图4-35所示,以此作为电磁机构的速度跟踪控制目标。仿真时参数设计为:运动部分质量m=5kg,螺线管直径为20cm,长度为20cm,线圈匝数为100,永磁体磁感应强度为1T,电感L=1.36mH,电阻R=1Ω,运动行程为10mm。
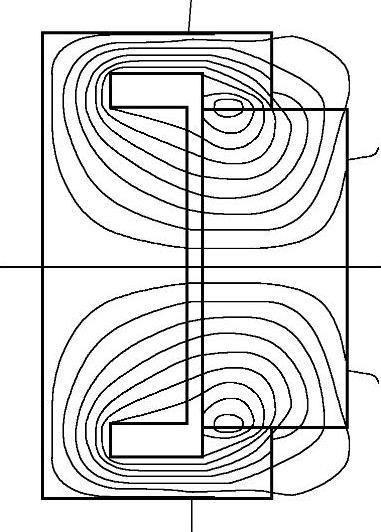
图4-33 电磁机构的磁通空间分布
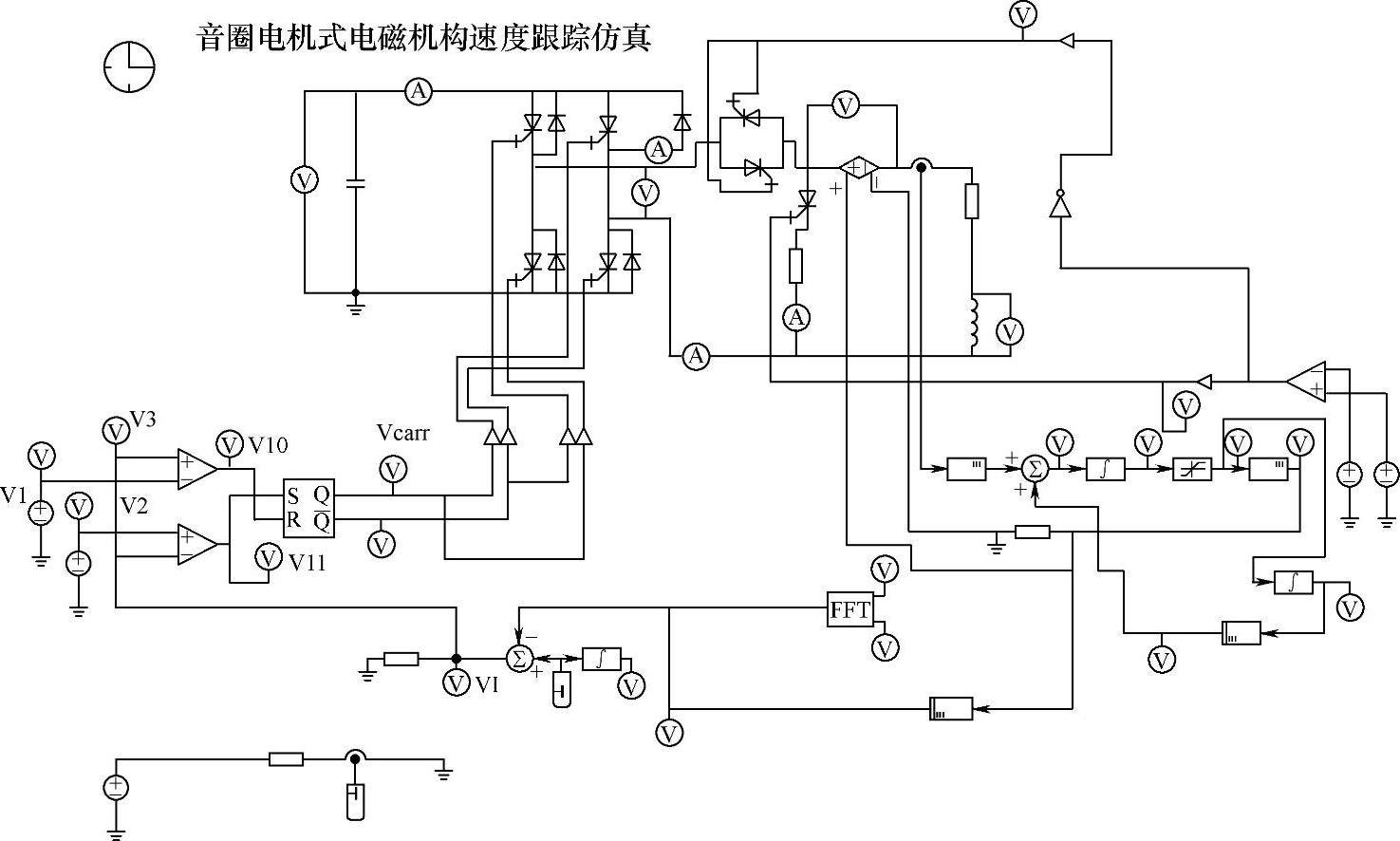
图4-34 音圈电机式电磁机构的动态特性仿真系统
以图4-35所给定的速度曲线作为参考,利用图4-34构建的仿真系统,对电磁机构的动作特性进行了仿真,结果如图4-36~图4-38所示。
由仿真结果可知,为提高其动作快速性,需要提供较大的脉冲电磁力,同时为实现其速度的最优控制,亦需在运动过程中通过控制主回路将该力反向,以提供机械缓冲所需的较大脉冲电磁力。

图4-35 给定的分闸运动速度曲线
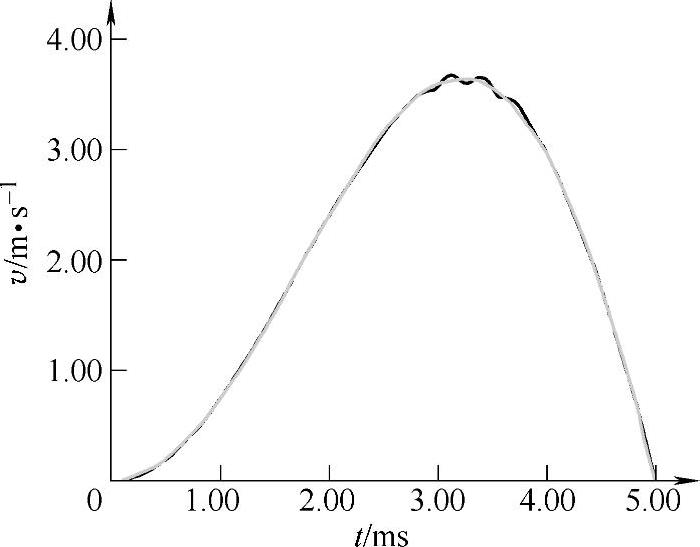
图4-36 给定与实际运动速度曲线的比较 (波动曲线为实际运动曲线)
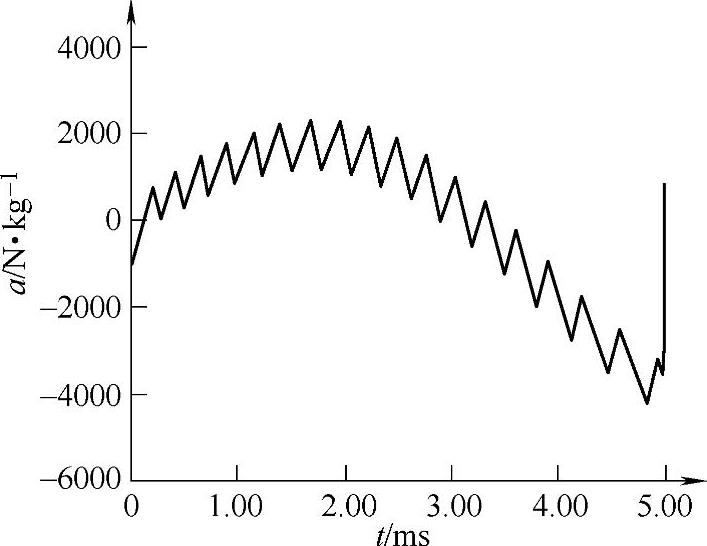
图4-37 加速度曲线
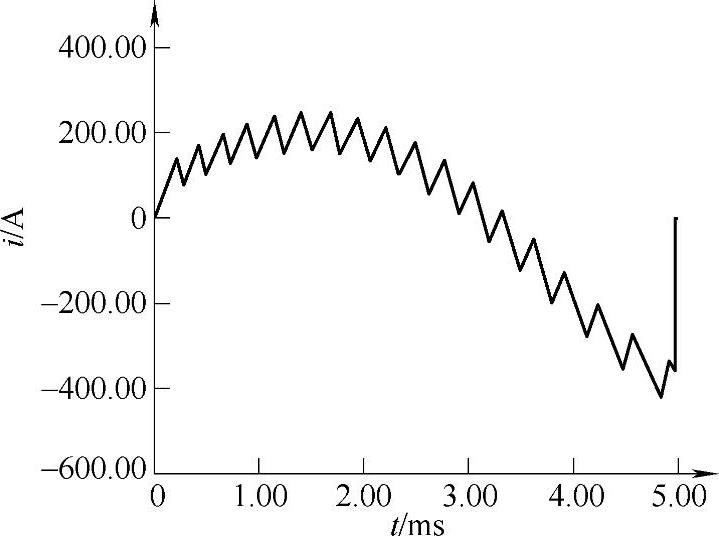
图4-38 线圈受控放电电流曲线
虽然理论上按照最优速度曲线进行控制,实现开关触头运动到位时的零碰撞颤振,但在运动结束时刻线圈内仍有较大的剩余电流,倘不采取有效措施释放电感能量,则会造成触头在反向电磁力的作用下产生更大反弹,甚至可能导致分闸失败。因此,临近运动结束时,提前控制线圈放电回路导通,以快速释放能量使电流到零,并充分利用双稳弹簧在半行程后变阻力为驱动力的特点,可解决该极短过程的电磁缓冲问题,具体参见图4-37和图4-38所示曲线的末端。仿真结果表明,在4.9ms时触发串联有400Ω电阻的放电旁路导通(见图4-32的点划线框部分),则行程结束时动触头的运动速度可以控制到很小值,约为0.1m/s,如图4-39末端所示。此时触头残余的动能极小,约为0.025J,在弹簧力作用下几乎不会发生碰撞反弹。整个过程中速度跟踪控制的效果较好,除了因释放电感残余能量造成行程结束时速度为0.1m/s外,整个过程的速度跟踪控制绝对误差小于0.04m/s,如图4-39所示。
4.2.2.5 小结
提出一种结构简单的音圈电机式快速电磁机构,并给出描述其动态运动特性的数学方程组。将电磁机构的电磁与力学运动过程等效为包含受控电压源的R-L-C回路充放电的动力学模型,并构建了基于PSIM的电磁机构运动特性的控制仿真系统。基于电力电子变换拓扑,提出了速度跟踪反馈控制策略,能有效实现最优分、合闸速度的跟踪控制,且同时满足快速性要求,可在5ms内准确完成分、合闸操作。仿真结果表明,由于电感残余能量的存在,使得最终的分、合闸速度不可能为零,但通过旁路触发控制可将速度减小至0.01m/s,利用电磁缓冲控制实现无碰撞反弹。
该新型电磁机构中主要使用了铁心、永磁体等性能易受外界磁场影响的非线性材料,增加了机构的非线性特征,为保证机构数学模型的准确性,必须使其工作在线性区域,这限制了电磁力、速度等性能参数的提高。
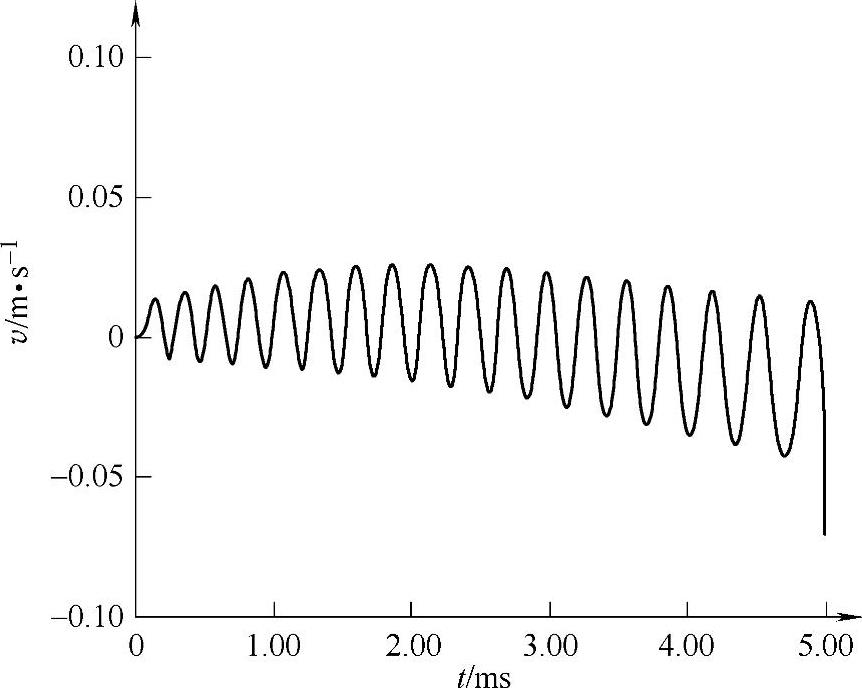
图4-39 机构运动速度跟踪控制的误差曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





