
该算法又被称为“标记-清除”算法,依赖于对所有存活对象进行一次全局遍历来确定哪些对象可以回收,遍历的过程从根出发,找到所有可到达对象,其他不可到达的对象就是垃圾对象,可被回收。正如其名称所暗示的那样,这个算法分为两大阶段:Mark和Sweep。这种分步执行的思路构成了现代垃圾收集算法的思想基础。与引用计数算法不同的是,Mark-Sweep算法不需要监测每一次内存分配和指针操作,只需要在标记阶段进行一次统计就可以了。Mark-Sweep算法可以非常自然地处理环形问题,另外在创建对象和销毁对象时少了操作引用计数值的开销。不过该算法也有一个缺点,就是需要在标记和清除阶段中把所有对象停止执行。在垃圾回收器运行过程中,应用程序必须暂时停止,并等到垃圾回收器全部运行完成后,才能重新启动应用程序运行。
Dalvik虚拟机最常用的算法便是Mark Sweep算法,该算法一般分Mark阶段(标记出活动对象),Sweep阶段(回收垃圾内存)和可选的Compact阶段(减少堆中的碎片)。Dalvik虚拟机的实现不进行可选的Compact阶段。
(1)Mark阶段
垃圾收集的第一步是标记出活动对象,因为没有办法识别那些不可访问的对象(Unreachableobjects),因此只能标记出活动对象,这样所有未被标记的对象就是可以回收的垃圾。
当进行垃圾收集时,需要停止Dalvik虚拟机的运行(当然,除了垃圾收集之外)。因此垃圾收集又被称作STW(Stop The World)。Dalvik虚拟机在运行过程中要维护一些状态信息,这些信息包括:每个线程所保存的寄存器,Java类中的静态字段,局部和全局的JNI引用,JVM中的所有函数调用会对应一个相应的C语言的栈帧。每一个栈帧里可能包含对对象的引用,比如包含对象引用的局部变量和参数。
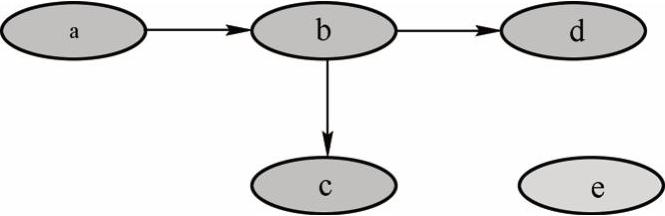
所有这些引用信息被加入到一个集合中,叫作根集合。然后从根集合开始,递归地查找可以从根集合出发访问的对象。因此,Mark过程又被称为追踪,追踪所有可被访问的对象。如图7-1所示,假定从根集合{a}开始,可以访问的对象集合为{a,b,c,d},这样就追踪出所有可被访问的对象集合。
 (www.daowen.com)
(www.daowen.com)
图7-1 Mark过程
垃圾收集使用栈来保存根集合,然后对栈中的每一个元素,递归追踪所有可访问的对象,对于所有可访问的对象,在markBits位图中将该对象的内存起始地址对应的位设为1。这样当栈为空时,markBits位图就是所有可访问的对象集合。
(2)Sweep阶段
垃圾收集的第二步就是回收内存,在Mark阶段通过markBits位图可以得到所有可访问的对象集合,而liveBits位图表示所有已经分配的对象集合。因此通过比较这两个位图,liveBits位图和markBits位图的差异就是所有可回收的对象集合。Sweep阶段调用free函数来释放这些内存给堆。
(3)Concurrent Mark(并发标记)
为了运行垃圾收集,需要停止虚拟机的运行,这可能会导致程序较长时间的停顿。垃圾收集的主要工作位于Mark阶段,Dalvik虚拟机使用了Concurrent Mark技术以缩短停顿时间。在Concurrent Mark中引入一个单独的gc线程,由该线程去跟踪自己的根集合中所有可访问的对象,同时所有其他的线程也在运行。这也是Concurrent一词的含义。但是为了回收内存,即运行Sweep阶段,必须停止虚拟机的运行。这会导入一个问题,即在gc线程标记对象的时候,其他线程的运行又引入了新的访问对象。因此在Sweep阶段,又重新运行Mark阶段,但是在这个阶段对于已经标记的对象来说,可以不用继续递归追踪了,这样从一定程度上降低了程序的停顿时间。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






