步骤1:进入机构模式。
在功能区中切换至“应用程序”选项卡,单击“运动”组中的“机构”按钮 ,进入机构模式。
,进入机构模式。
步骤2:定义伺服电动机。
(1)单击“伺服电动机”按钮 ,打开“伺服电动机定义”对话框。
,打开“伺服电动机定义”对话框。
(2)接受默认的名称为“ServoMotor1”,选择图13-65所示销钉联接(该销钉联接位于图13-65中的左下角)定义运动轴。
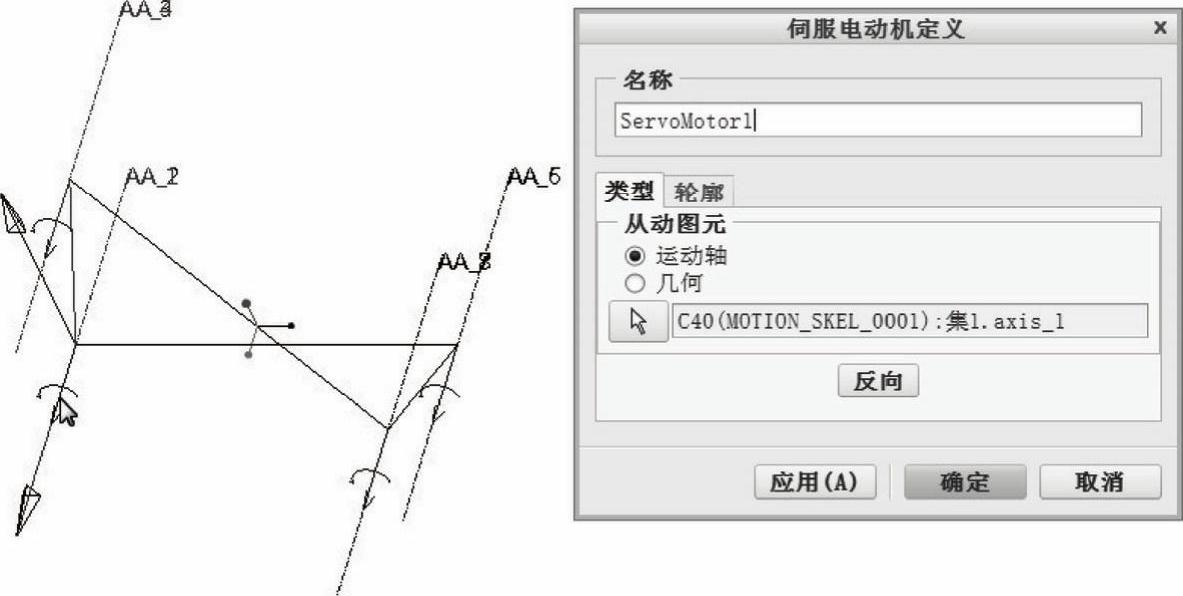
图13-65 定义伺服电动机
(3)切换到“轮廓”选项卡,在“规范”选项组的下拉列表框中选择“速度”选项,在“模”选项组的下拉列表框中选择“常量”选项,输入“A”值为“10”,如图13-66所示,单击“确定”按钮。
步骤3:定义机构分析。
(1)单击“机构分析”按钮 ,打开“分析定义”对话框。
,打开“分析定义”对话框。
(2)接受默认的分析名称,从“类型”选项组的下拉列表框中选择“运动学”选项,“首选项”选项卡上的设置选项如图13-67所示。
 (www.daowen.com)
(www.daowen.com)
图13-66 定义运动轮廓
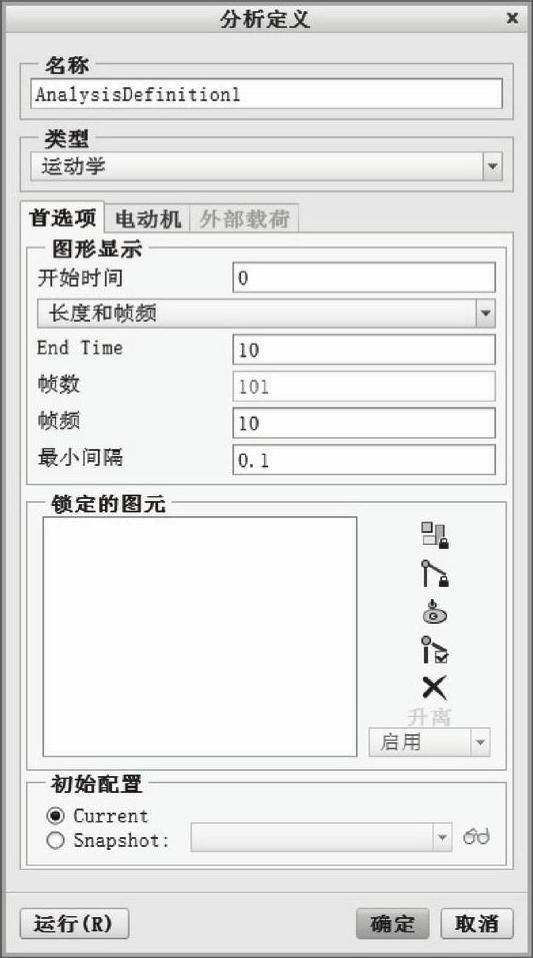
图13-67 “分析定义”对话框
(3)单击“分析定义”对话框中的“运行”按钮,则可以在模型窗口中观察到机构的动态运动画面。当机构运动一小段时间后,机构不能够再运行下去了,此时系统弹出“错误-装配失败”对话框,这样便得到了该机构的一个极限位置,如图13-68所示。
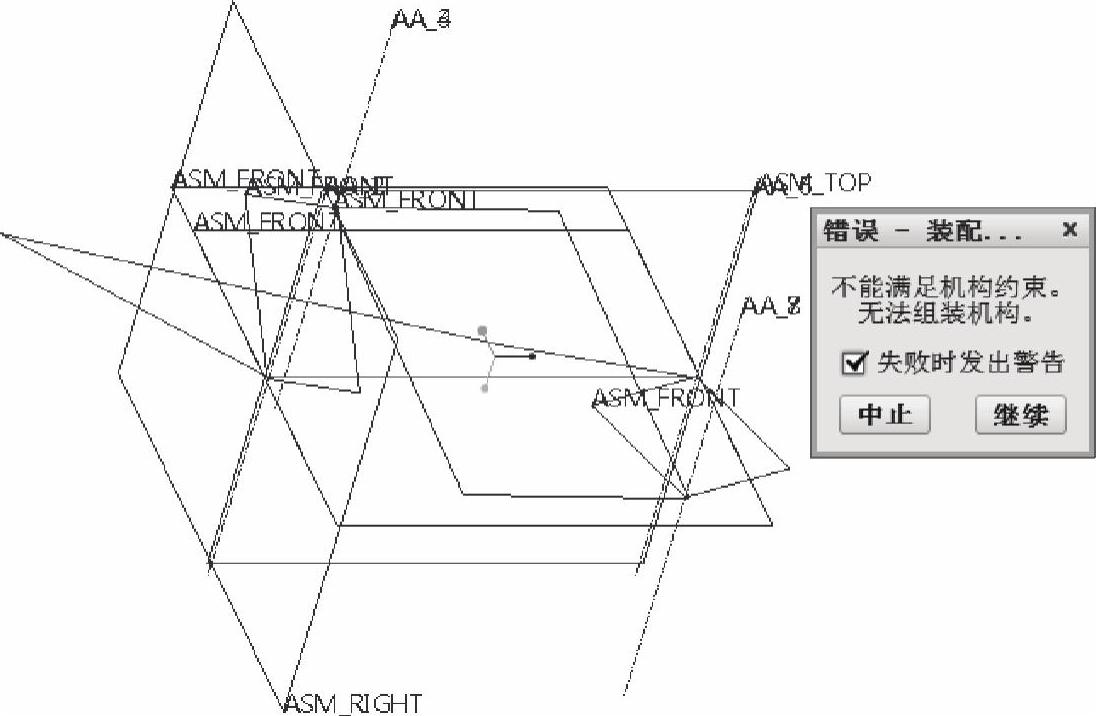
图13-68 出现运动失败的现象
说明:在“错误-装配失败”对话框中单击“继续”按钮,则进行下一运动帧的分析,有兴趣的读者可以依次单击“继续”按钮,观察机构在设定时间内的运动情况。另外,倘若定义相反方向的伺服电动机,那么可以得到该铰链四杆机构的自初始位置运动的另一个极限位置。
(4)关闭“错误-装配失败”对话框后,单击“分析定义”对话框的“确定”按钮。
步骤4:保存文件。
这样,利用运动骨架模型便可以对该机构进行相关的运动学分析,从而对该机构的运动情况、极限位置等有一个直观地认识,这对于改善机构以及提高机构设计的一次成功率很有帮助。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






