蜗杆传动机构是在空间交错的两轴间传递运动和动力的一种常见的传动机构。可以将蜗杆看似一个具有凹形轮缘的斜齿轮。对于一般的单头蜗杆,其旋转一周,蜗轮只转过一个齿距。
按照蜗杆形状的不同,可以将蜗杆传动分为圆柱蜗杆传动、环面蜗杆传动和锥蜗杆传动,其中以圆柱蜗杆传动应用较多。
圆柱蜗杆传动又包括普通圆柱蜗杆传动和圆弧圆柱蜗杆传动两大类。根据齿廓曲线形状来分,普通圆柱蜗杆可以分为阿基米德蜗杆(ZK蜗杆)、渐开线蜗杆(ZI蜗杆)、法向直廓蜗杆(ZN蜗杆)和锥面包络蜗杆(ZK蜗杆)等。
环面蜗杆的结构特点是,蜗杆体在轴向的外形是以凹圆弧为母线所形成的旋转曲面。环面蜗杆传动轮齿受力情况和润滑油膜形成条件较好,其承载能力约为阿基米德蜗杆传动的2~4倍,效率可高达85%~90%,但是其制造和安装精度要求较高。
锥蜗杆传动的两轴交错角通常为90°,在传动过程中,同时接触的点数较多,重合度大,传动比范围大,承载能力和效率较高,侧隙便于控制和调整。另外,锥蜗杆制造和安装都较为简便,工艺性好。
下面,主要介绍普通圆柱蜗杆中的阿基米德蜗杆,其传动结构如图8-1所示。
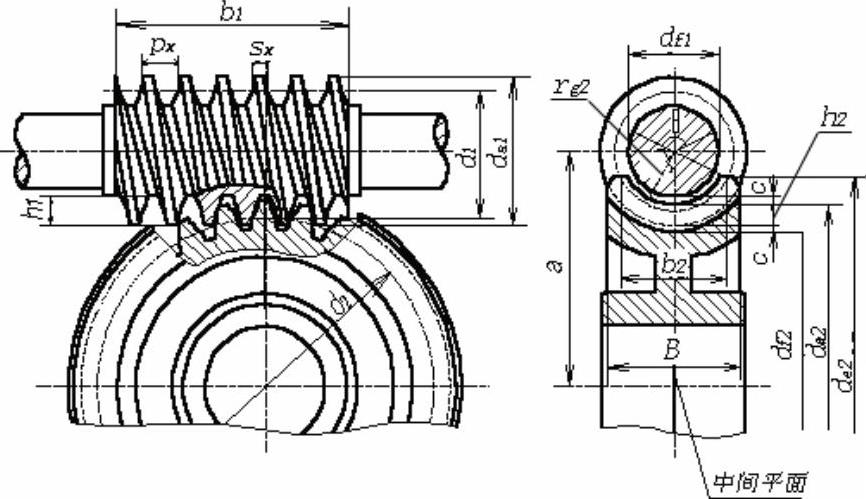
图8-1 蜗杆、蜗轮传动(www.daowen.com)
在分析阿基米德蜗杆结构尺寸时,常采用中间平面内的参数作为标准值来进行描述,所述的中间平面是指通过蜗杆轴线并与蜗轮轴线垂直的平面,在该平面内,可以将蜗杆与蜗轮的啮合关系看做是齿条与渐开线齿轮的啮合关系。
阿基米德圆柱蜗杆传动的主要参数有模数m、压力角α、蜗杆头数(即蜗杆螺旋线数)z1,蜗轮齿数z2、导程角γ(蜗杆分度圆上任一点的切线与端面之间所夹的锐角称为蜗杆的导程角)、蜗杆的分度圆直径d1和蜗杆直径系数q。
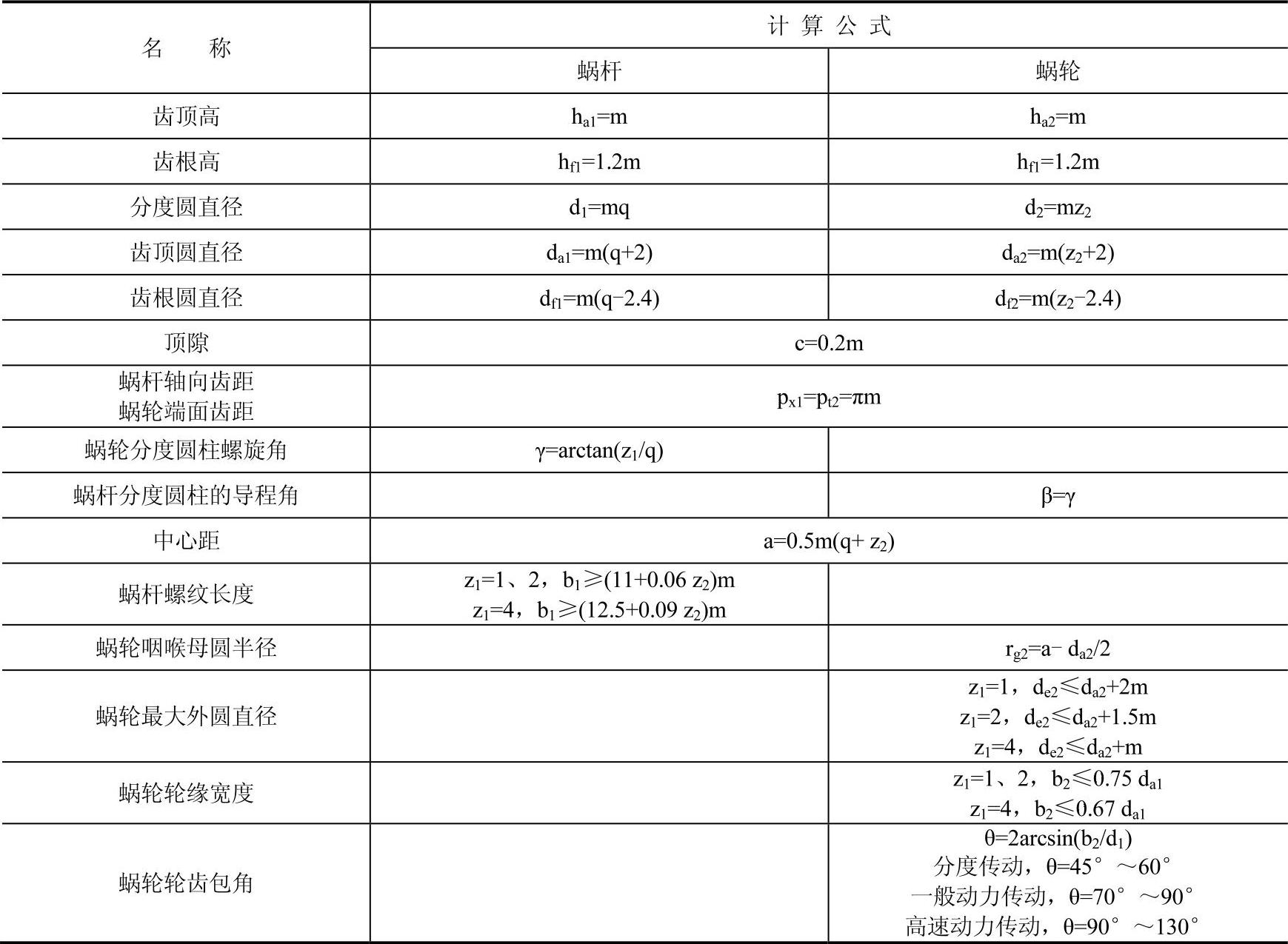
表8-1所示是标准蜗杆传动的主要几何尺寸计算公式及说明(变位系数为0)。
表8-1 圆柱蜗杆传动的几何尺寸计算公式及说明
在进行蜗杆、蜗轮结构设计时,需要考虑其材料、常用的结构特点等因素。通常蜗杆是和轴做成一体的,若轴上没有设计退刀槽等工艺结构,蜗杆牙齿部分用铣制的方式来加工;若轴上设计有退刀槽结构,牙齿部分可以采用车制加工的方式,也可以采用铣制的方式来加工。常用的蜗轮结构形式主要有齿圈形式、螺栓连接形式、整体浇铸形式和拼铸形式等几种方式,具体的结构形式可以参看有关的机械设计课本或者相关的设计资料。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




