1.公差原则的选择
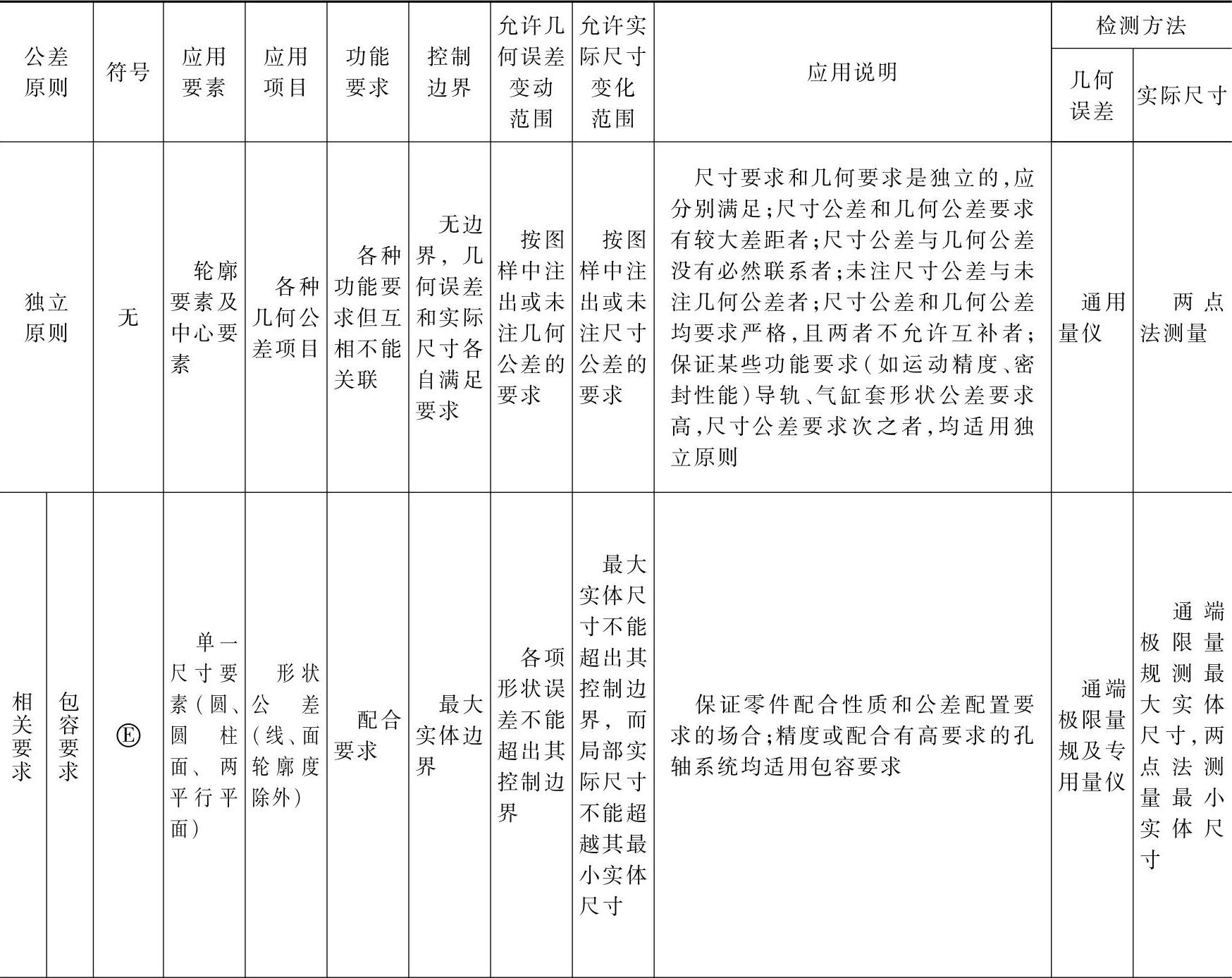
公差原则的选择涉及的因素较多,如被测要素的设计功能要求、零件尺寸的大小、尺寸公差带的特点、几何公差补偿尺寸公差的关系以及检测的可行性和经济性等,对照公差原则的各种功能特点及适用条件,综合分析诸多因素,合理选择公差原则。表2-25列出了各项公差原则的应用项目、应用要素、功能要求、控制边界、允许几何误差变动范围、允许实际尺寸变化范围、检测方法以及公差原则各项目的应用条件的综合说明,可供公差原则选择时参考。
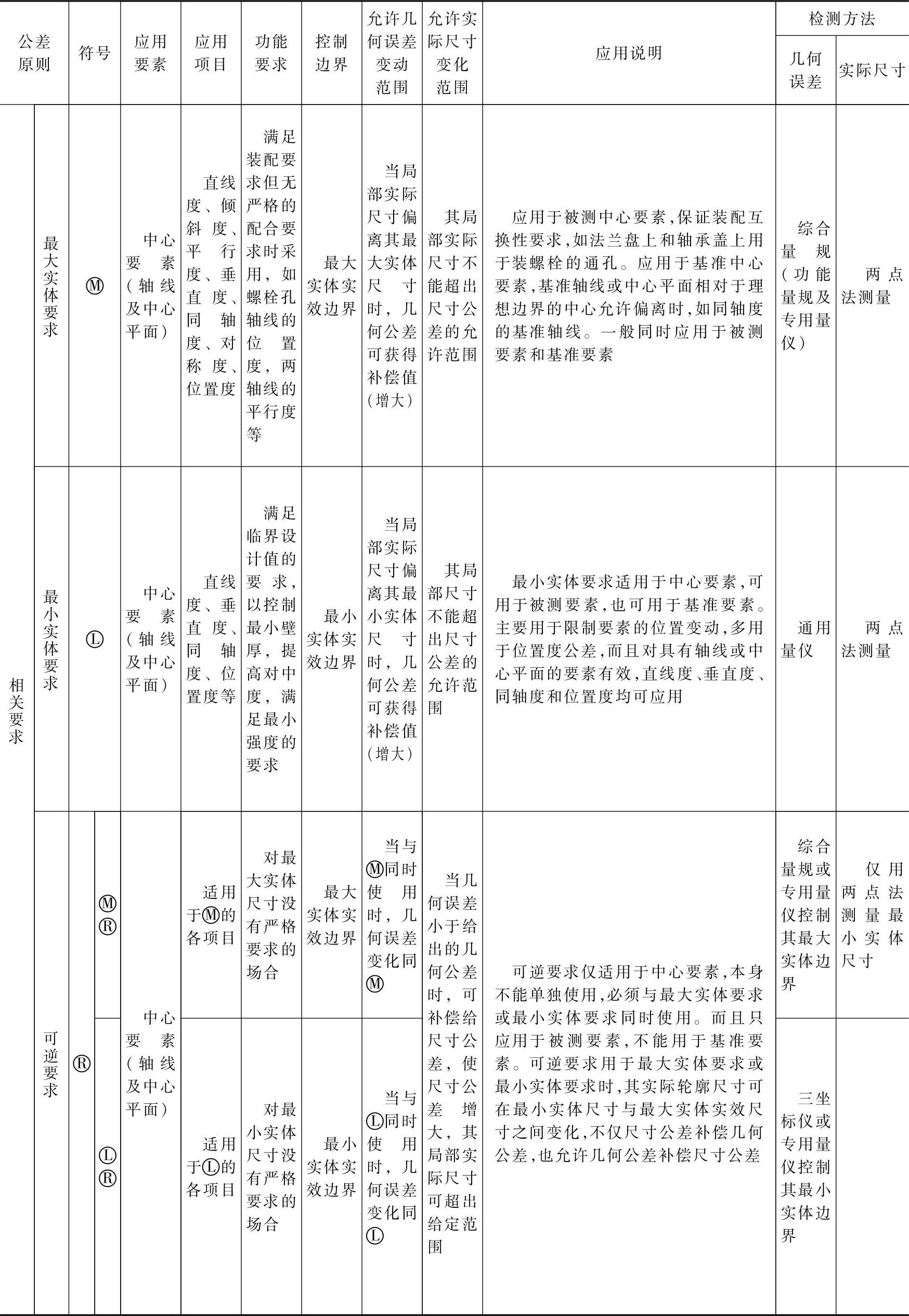
表2-25 公差原则综合分析与应用
(续)
2.公差原则应用及标注示例
GB/T 16671—2009在附录中给出了带 、
、 、
、 的公差标注举例,这些举例与ISO2692:2006《产品几何技术规范(GPS)几何公差最大实体要求(MMR)、最小实体要求(LMR)和可逆要求(RPR)》的附录资料相同,能够帮助读者深入理解。受篇幅限制、从标准中只弓用极少的示例,其他示例参见GB/T 10671—2009或机械工业出版社《公差与配合实用手册》(第2版)。
的公差标注举例,这些举例与ISO2692:2006《产品几何技术规范(GPS)几何公差最大实体要求(MMR)、最小实体要求(LMR)和可逆要求(RPR)》的附录资料相同,能够帮助读者深入理解。受篇幅限制、从标准中只弓用极少的示例,其他示例参见GB/T 10671—2009或机械工业出版社《公差与配合实用手册》(第2版)。
示例1:一个外圆柱要素具有尺寸要求和对其轴线具有形状(直线度)要求的MMR示例。
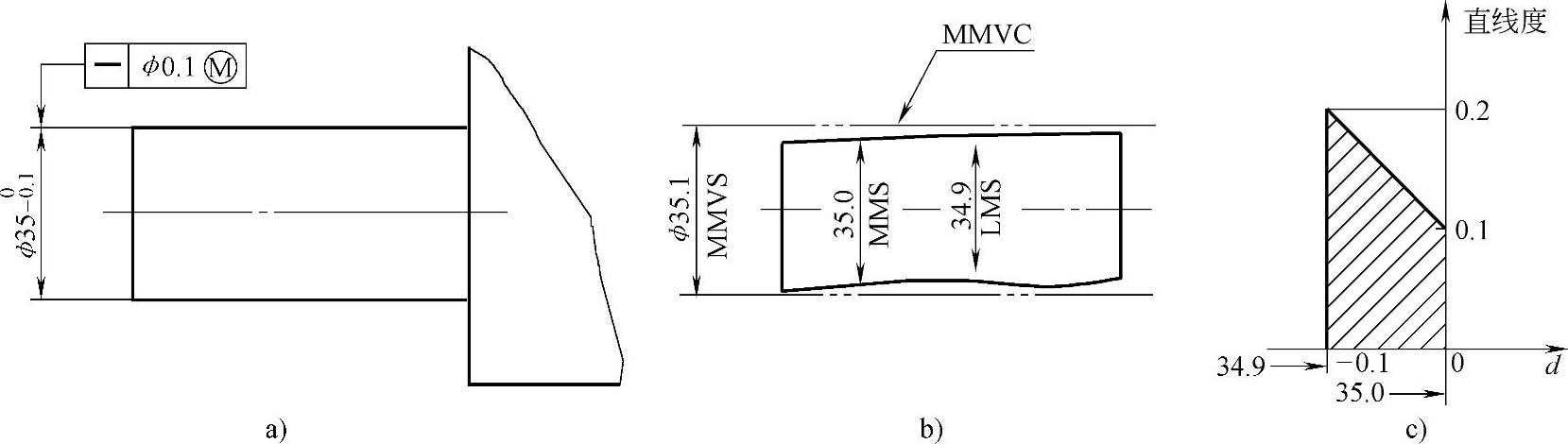
图2-6 示例1
a)图样标注 b)解释 c)动态公差图
图2-6“所示为一标注公差的轴,其设计的功能是可与一个等长的标注公差的孔形成间隙配合。本例可作如下解释:
1)轴的提取要素不得违反其最大实体实效状态(MMVC),其直径为MMVS=35.1mm。
2)轴的提取要素各处的局部直径应大于LMS=34.9mm,巨应小于MMS=35.0mm。
3)MMVC的方向和位置无约束。
4)图2-6“中轴线的直线度公差(φ0.1mm)是该轴为其最大实体状态(MMC)时给定的;若该轴为其最小实体状态(LMC)时,其轴线直线度误差允许达到的最大值可为图2-6“中给定的轴线直线度公差(φ0.1mm)与该轴的尺寸公差(0.1mm)之和φ0.2mm;若该轴处于最大实体状态(MMC)与最小实体状态(LMC)之间,其轴线直线度公差在φ0.1~φ0.2mm之间变化。图2-6c给出了表述上述关系的动态公差图。
示例2:一个内圆柱要素具有尺寸要求和对其轴线具有形状(直线度)要求的MMR示例。
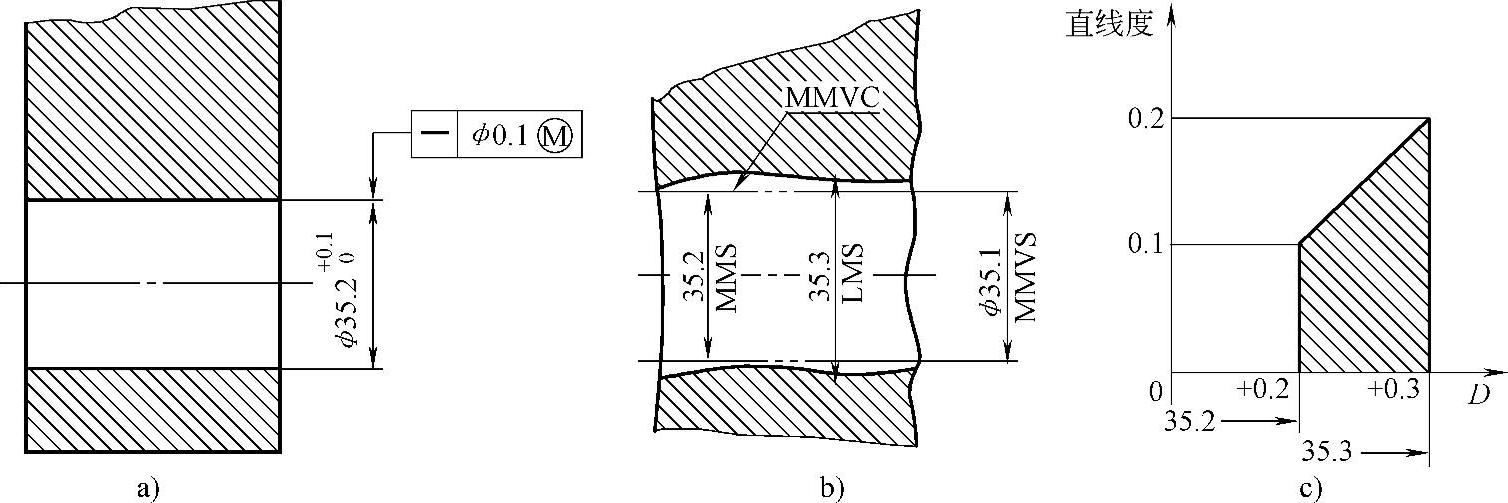
图2-7 示例2
a)图样标注 b)解释 c)动态公差图
图2-7“所示为一标注公差的孔,其预期的功能是可与一个等长的标注公差的轴形成间隙配合。本例可作如下解释:
1)孔的提取要素不得违反其最大实体实效状态(MMVC),其直径为MMVS=35.1mm。
2)孔的提取要素各处的局部直径应小于LMS=35.3mm,且应大于MMS=35.2mm。
3)MMVC的方向和位置无约束。
4)图2-7“中轴线的直线度公差(φ0.1mm)是该孔为其最大实体状态(MMC)时给定的;若该轴为其最小实体状态(LMC)时,其轴线直线度误差允许达到的最大值可为图2-7“中给定的轴线直线度公差(φ0.1mm)与该孔的尺寸公差(0.1mm)之和φ0.2mm;若该孔处于最大实体状态(MMC)与最小实体状态(LMC)之间,其轴线直线度公差在φ0.1~φ0.2mm之间变化。图2-7c给出了表述上述关系的动态公差图。
示例3:一个外圆柱要素具有尺寸要求和对其轴线具有位置(位置度)要求的MMR示例。
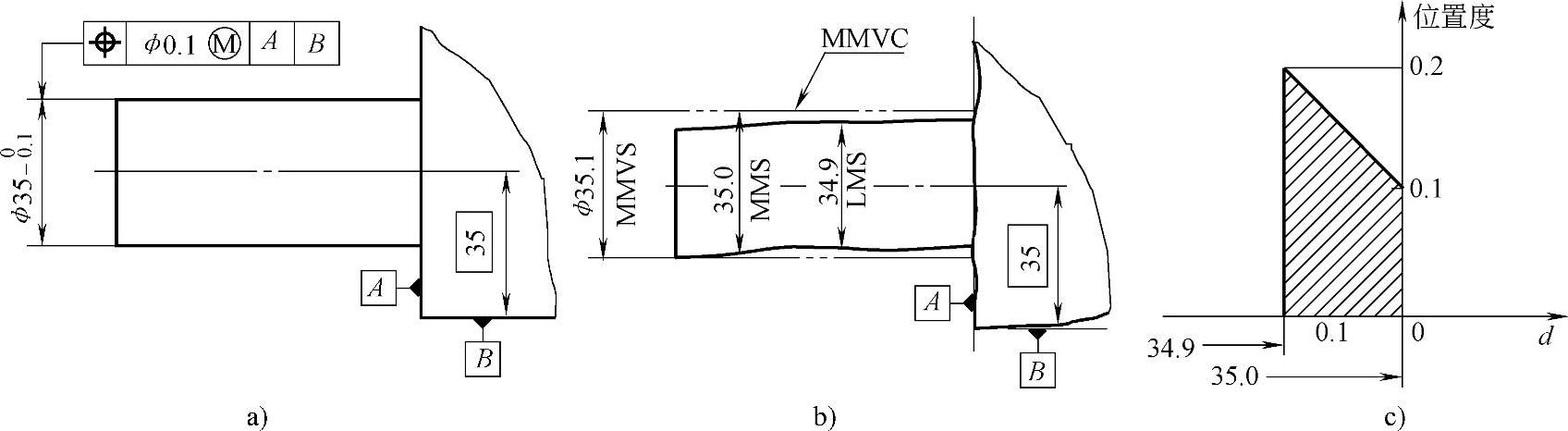
图2-8 示例3
a)图样标注 b)解释 c)动态公差图
图2-8a所示零件的设计功能是与图2-9a所示零件相装配的,而巨要求两基准平面A相接触,两基准平面B双方同时与另一零件(图中未画出)的平面相接触。本例可作如下解释:
1)轴的提取要素不得违反其最大实体实效状态(MMVC),其直径为MMVS=35.1mm。(https://www.daowen.com)
2)轴的提取要素各处的局部直径应大于LMS=34.9mm,且应小于MMS=35.0mm。
3)MMVC的方向与基准A相垂直,并且其位置在与基准B相距35mm的理论正确位置上。
4)图2-8a中轴线的位置度公差(φ0.1mm)是该轴为其最大实体状态(MMC)时给定的;若该轴为其最小实体状态(LMC)时,其轴线位置度误差允许达到的最大值可为图2-8a中给定的轴线位置度公差(φ0.1mm)与该轴的尺寸公差(0.1mm)之和φ0.2mm;若该轴处于最大实体状态(MMC)与最小实体状态(LMC)之间,其轴线位置度公差在φ0.1~φ0.2mm之间变化。图2-8c给出了表述上述关系的动态公差图。
示例4:一个内圆柱要素具有尺寸要求和对其轴线具有位置(位置度)要求的MMR示例。
图2-9a所示零件的设计功能是与图2-8a所示零件相装配的,而巨要求两基准平面A相接触,两基准平面B双方同时与另一零件(图中未画出)的平面相接触。本例可作如下解释:
1)孔的提取要素不得违反其最大实体实效状态(MMVC),其直径为MMVS=35.1mm。
2)孔的提取要素各处的局部直径应小于LMS=35.3mm,巨应大于MMS=35.2mm。
3)MMVC的方向与基准A相垂直,并巨其位置在与基准B相距35mm的理论正确位置上。
4)图2-9a中轴线的位置度公差(φ0.1mm)是该孔为其最大实体状态(MMC)时给定的;若该孔为其最小实体状态(LMC)时,其轴线位置度误差允许达到的最大值可为图2-9a中给定的轴线位置度公差(φ0.1mm)与该孔的尺寸公差(0.1mm)之和φ0.2mm;若该孔处于最大实体状态(MMC)与最小实体状态(LMC)之间,其轴线位置度公差在φ0.1mm~φ0.2mm之间变化。图2-9c给出了表述上述关系的动态公差图。
示例5:一个外尺寸要素与一个作为基准的同心内尺寸要素具有位置度要求的LMR示例。
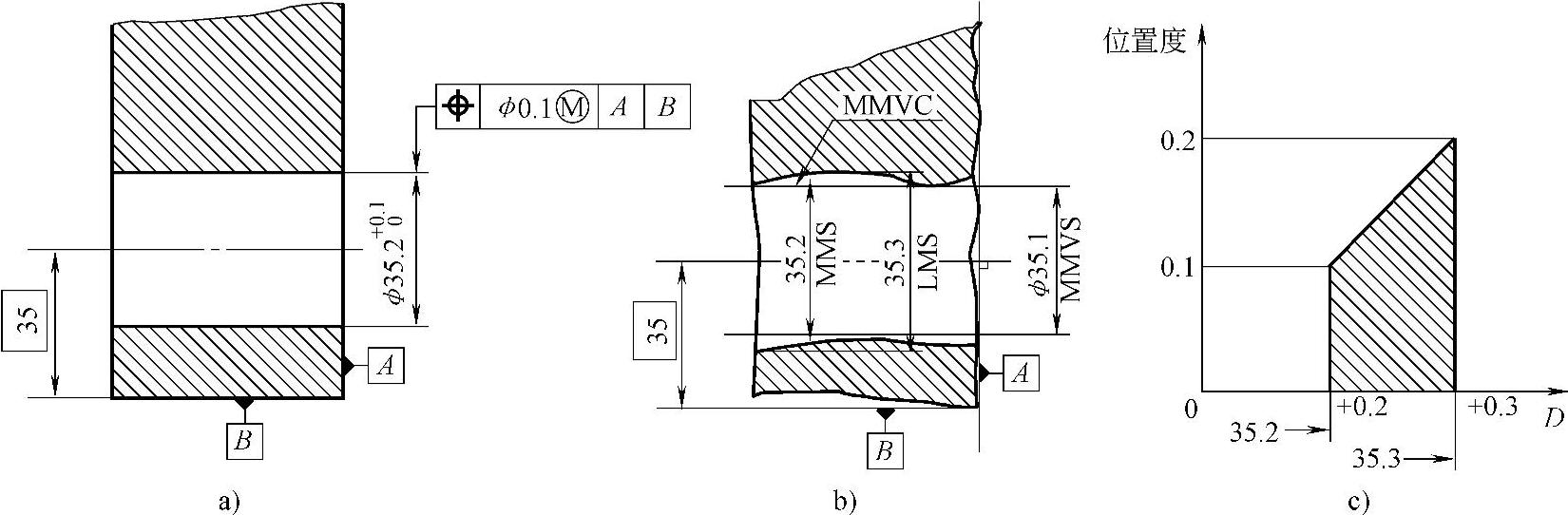
图2-9 示例4
a)图样标注 b)解释 c)动态公差图
图2-10a仅说明最小实体要求的一些原则。该图样标注不全,不能控制最小壁厚。在其他要素上缺少最小实体要求,因此不能表示这一功能。本图例可以用位置度、同轴度或同心度标注,其意义均相同。本例可作如下解释:
1)外尺寸要素的提取要素不得违反其最小实体实效状态(LMVC),其直径为LMVS=69.8mm。
2)外尺寸要素的提取要素各处的局部直径应小于MMS=70.0mm,且应大于LMS=69.9mm。
3)LMVC的方向与基准A相平行,并巨其位置在与基准A同轴的理论正确位置上。
4)图2-10a中轴线的位置度公差(φ0.1mm)是该外尺寸要素为其最小实体状态(LMC)时给定的;若该外尺寸要素为其最大实体状态(MMC)时,其轴线位置度误差允许达到的最大值可为图2-10a中给定的轴线位置度公差(φ0.1mm)与该轴的尺寸公差(0.1mm)之和φ0.2mm;若该轴处于最小实体状态(LMC)与最大实体状态(MMC)之间,其轴线位置度公差在φ0.1~φ0.2mm之间变化。图2-10c给出了表述上述关系的动态公差图。
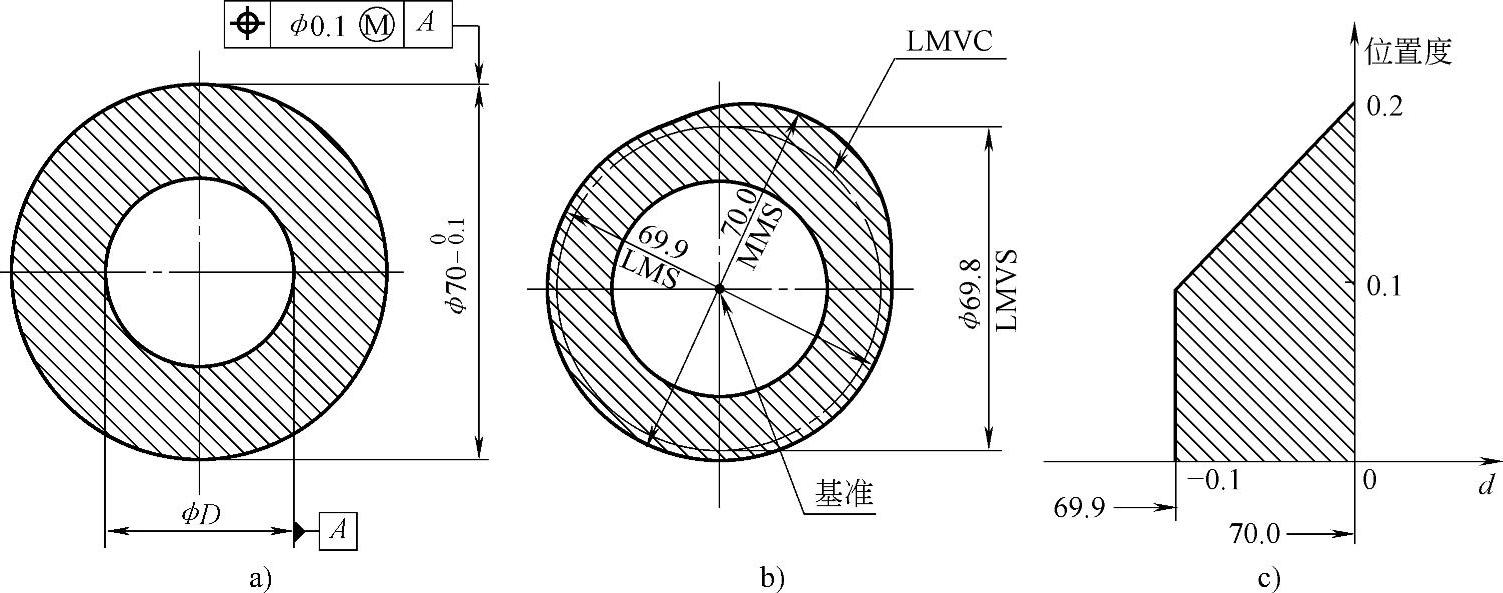
图2-10 示例5
a)图样标注 b)解释 c)动态公差图
示例6:一个内尺寸要素与一个作为基准的同心外尺寸要素具有位置度要求的LMR示例。
图2-11a仅说明最小实体要求的一些原则。该图样标注不全,不能控制最小壁厚。在其他要素上缺少最小实体要求,因此不能表示这一功能。本图例可以用位置度、同轴度或同心度标注,其意义均相同。本例可作如下解释:
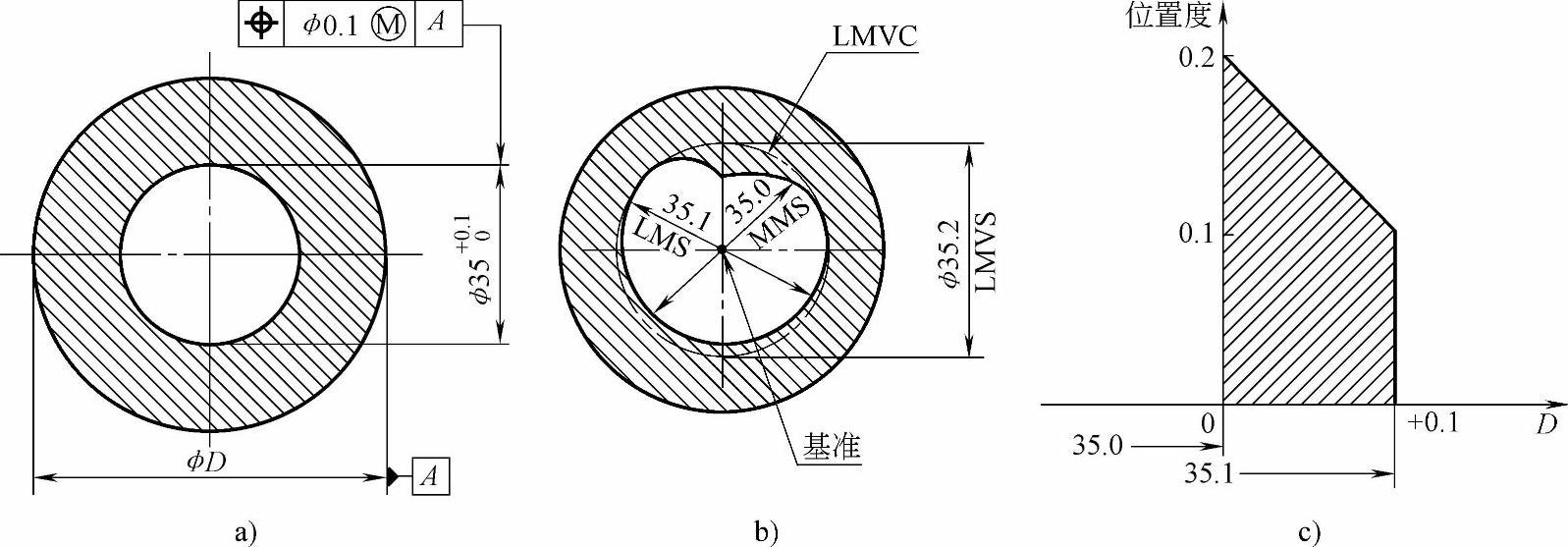
图2-11 示例6
a)图样标注 b)解释 c)动态公差图
1)内尺寸要素的提取要素不得违反其最小实体实效状态(LMVC),其直径为LMVS=35.2mm。
2)内尺寸要素的提取要素各处的局部直径应大于MMS=35.0mm,且应小于LMS=35.1mm。
3)LMVC的方向与基准A相平行,并且其位置在与基准A同轴的理论正确位置上。
4)图2-11“中轴线的位置度公差(φ0.1mm)是该内尺寸要素为其最小实体状态(LMC)时给定的;若该内尺寸要素为其最大实体状态(MMC)时,其轴线位置度误差允许达到的最大值可为图2-11“中给定的轴线位置度公差(φ0.1mm)与该内尺寸要素尺寸公差(0.1mm)之和φ0.2mm;若该内尺寸要素处于最小实体状态(LMC)与最大实体状态(MMC)之间,其轴线位置度公差在φ0.1mm~φ0.2mm之间变化。图2-11c给出了表述上述关系的动态公差图。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






