1.试验仪器设备
试验采用德国POLYTEC公司生产的PSV-500激光扫描测振仪,由PSV-500硬件系统以及软件系统PSV-Software9.0两大部分组成,PSV-500是以非接触方式测量物体振动的速度、加速度、位移、运动轨迹以及频率等的全数字式激光多普勒测振仪,可在距目标0.125~100m距离测试,测定的振幅可达2pm~6.4m,一次扫描完成几厘米器件到数十米结构的模态测量,测量点数可多达数十万点。用户无需建模,可在实物视频图像上快速直接完成测量网格布置,并以每秒30点以上速度扫描,具有极高的工作效率[18],已广泛应用于国防以及基础研究领域。
激光多普勒测振仪主要利用光学多普勒原理来测量物体的振动大小,其氦氖激光器发出一定频率(设为f0)的偏振光,由分光镜分成两路,一路作为测量,一路用于参考。测量光照射到被测物体表面,物体振动引起多普勒频移(fD);系统再收集反射光(f0+fD)与经过声光调制(通过布拉格器件BraggCell实现)的参考光汇聚在光电探测仪上,这样两束光在探测仪表面产生干涉,产生正比于运动物体速度的多普勒信号,如图6.37所示。
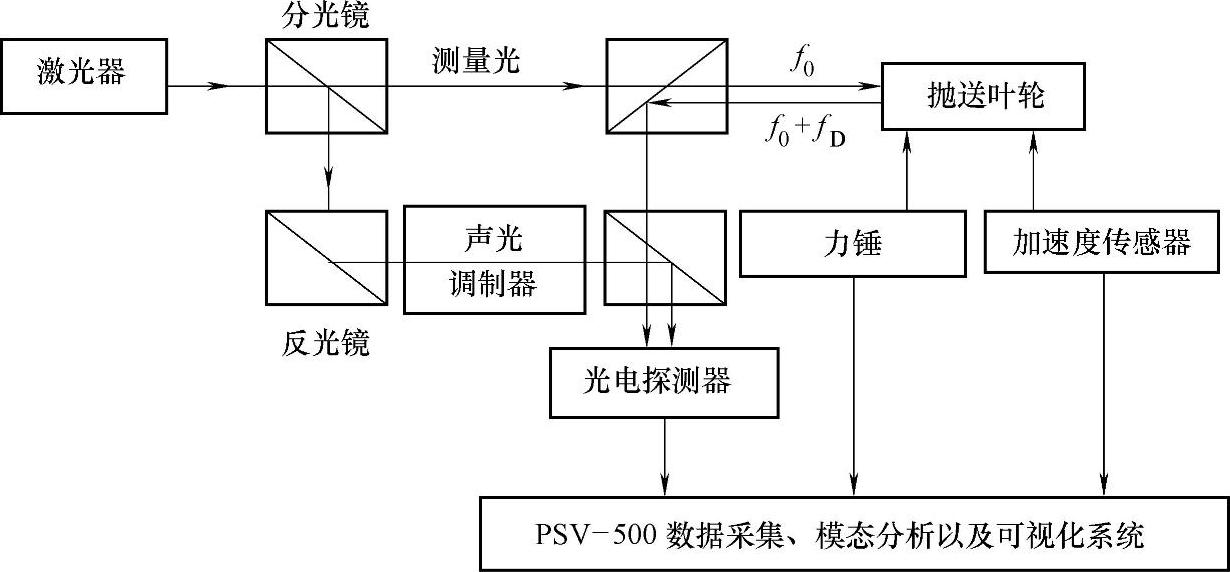
图6.37 试验原理图
注:f0为氦氖激光器发出的频率;fD为物体振动引起的多普勒频移。
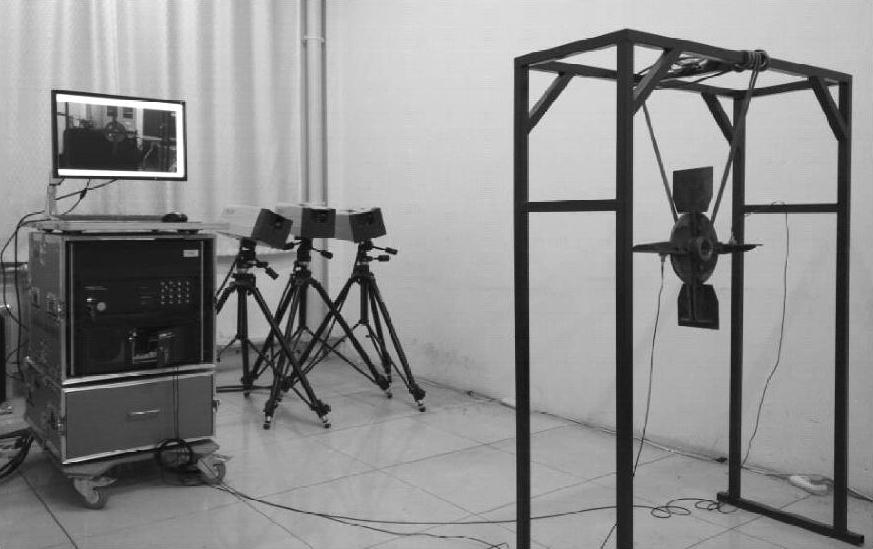
图6.38 抛送叶轮自由模态试验现场图
试验时抛送叶轮采用橡筋绳悬挂于试验架上(图6.38),使其处于“自由悬挂”状态。该结构实测的悬挂频率低于结构第1阶固有频率的10%,为合理支承。激励方式使用力锤激励。抛送叶轮为轴对称结构,使用锤击法做模态试验时,为了保证系统的可辨识性,激振点数目必须大于或等于模态重数[80]。本试验叶轮尺寸较小,随机选取4个激振点,其中2个激振点分布在圆形架板上,2个激振点选在叶片上。由于试验为非接触式测量,故不存在节点和节线,激振点的选取不干扰激光测试即可,通过4次数据采集和参数识别来保证数据的可靠性。同时测试系统可对信噪比差的响应点进行优化,直到结果最佳。选用北京东方振动和噪声技术研究所研制的INVMSC-1力锤以及INV 9824型IEPE加速度传感器(测试信号作为参考信号),其灵敏度分别为4Pc/N和5mV/g。(www.daowen.com)
2.试验方法
试验用抛送叶轮与数值建模采用相同的尺寸及材料,叶轮外径为ϕ500mm、叶片宽度为160mm、叶片厚5mm,径向叶片,叶片数为4,抛送叶轮材料为Q235。试验现场如图6.38所示。
悬挂好叶轮之后,需要在圆盘或者叶片上吸附两个加速度传感器,测量时作为参考信号输入。为防止传感器位置处于振动节点上,在试验中测点位置需经过反复调整。
试验时首先运行PSV Software9.0软件,启动数据采集测试模式,使激光头正对自由悬挂的叶轮,校准激光点后设置测试扫描点,圆盘和4个叶片表面共设置112个扫描点。扫描测量前,将扫描点进行关联,被扫描的叶轮表面会生成扫描网格。力锤敲击一次,完成一个测点的测量,随着力锤逐次敲击,激光点沿着扫描网格对测点逐个测量。扫描点的位置和数量根据叶轮不同被测表面的几何形状和激光头扫描范围确定,测点分布需尽量勾勒出试件被测表面的形状轮廓。叶轮圆盘和叶片表面的扫描点分布如图6.39所示。
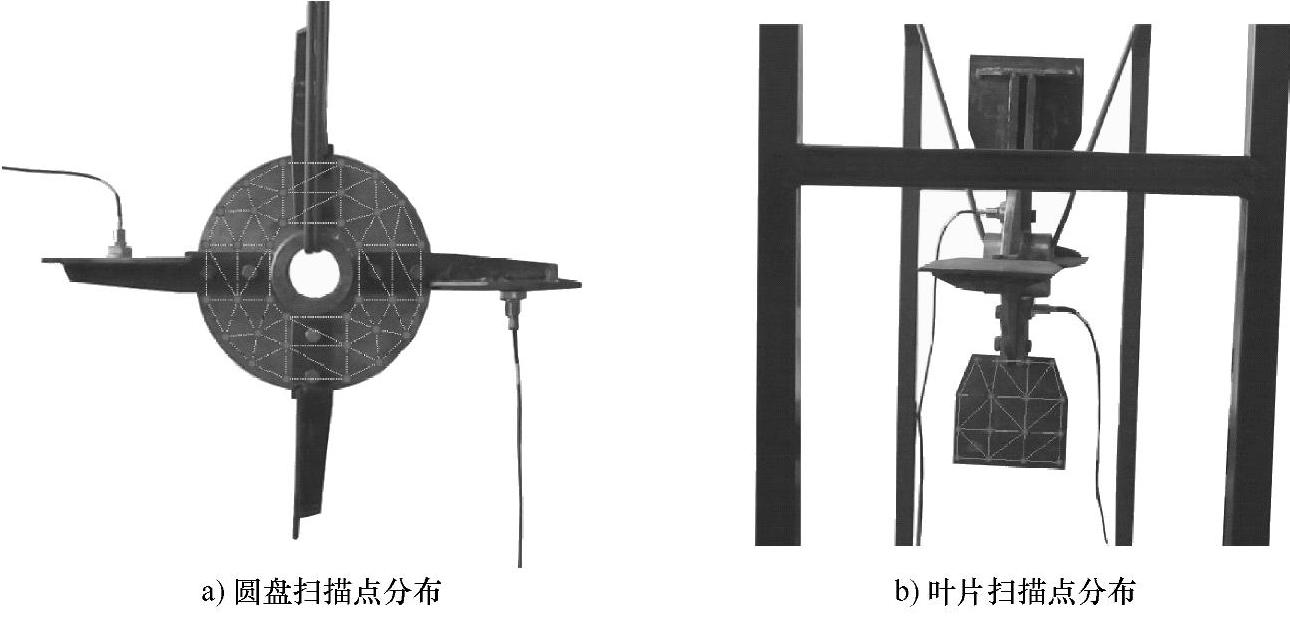
图6.39 叶轮圆盘和叶片表面的扫描点分布
采集参数设置包括FFT变换、通道设置、采样频率设置、加窗设置和定频试验时信号发生器设置。信号处理使用矩形窗避免泄露问题;信号平均处理选用75%重叠功能提高采集效率。然后进行扫描测量,并保存测量结果。
试验时叶轮圆形架板和叶片的数据是分别测量采集的,需要将其组合获得叶轮的空间模态。首先将3个激光头正对圆形架板,设置其三维坐标定位点以及扫描点;测试完架板后需记录3个坐标定位点的三维坐标值,并在架板实物表面记录其位置,以便进行组合时定位叶片和架板的位置关系;其次调整试验架台以及激光头的位置使其正对被测叶片,同时能扫到之前在架板上标记的坐标定位点,并将此3点输入测架板时记录的三维坐标值,这样通过坐标传递方式定位叶片和架板的位置关系;最后利用后处理软件将叶片和圆形架板组合到一起。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





