有时为了运动仿真能够使得机构停在一个指定位置,而这个平衡的力很难确定,这时就可以借助于添加未知力来计算所需力的大小。使用未知力来计算机构在指定的一组位置保持静态平衡时所需的力、转矩或千斤顶,在计算时需要考虑所有外部影响,包括重力、弹力、外力或约束条件等,而且机构只能有一个迁移度。下面简单介绍一下未知力的添加步骤:
(1)单击“运动仿真”标签栏“结果”面板上的“未知力”按钮  ,打开如图12-19所示“未知力”对话框。
,打开如图12-19所示“未知力”对话框。
(2)选择适当的力类型:“力”“转矩”或“千斤顶”。
1)对于力或转矩。
● 单击“位置”按钮,在图形窗口中单击零件上一个点。
● 单击“方向”按钮,在图形窗口中单击第二个连接零部件上的可用图元,通过确定在图形窗口中绘制的矢量的方向来指定力或转矩的方向。选择可用的图元,例如线性边、圆柱面或草图直线。图形窗口中会显示一个黄色矢量来表明力或转矩的方向。在图形窗口中将确定矢量的方向,可以改变矢量方向并使其在整个计算期间保持不变。
● 必要的话单击“方向”按钮,将力或转矩的方向(也
就是黄色矢量的方向)反向。
● 单击“固定载荷方向”按钮,可以锁定力或转矩的方向。
● 此外,如果要将方向与有应用点的零件相关联,单击“关联载荷方向”按钮,使其可以移动。
2)对于千斤顶。
● 单击“位置一”按钮,在图形窗口中单击某个零件上的可用图元。
● 单击“位置二”按钮,在图形窗口中单击某个零件上的可用图元,以选择第二个应用点并指定力矢量的方向。直线 P1-P2 定义了千斤顶上未知力的方向。 (https://www.daowen.com)
● 图形窗口中会显示一个代表力的黄色矢量。
(3)在“运动”选项的下拉列表中,选择机构的一个连接。
(4)如果选定的连接有两个或两个以上自由度,则在“自由度”框中选择受驱动的那个自由度。“初始位置”框将显示选定自由度的初始位置。
(5)在“最终位置”文本框中输入所需的最终位置。
(6)“步长数”框调整中间位置数,默认是 100 个步长。
(7)“更多”选项按钮显示与在图形窗口中显示力、转矩或千斤顶矢量相关的参数。
● 单击“显示”以在图形窗口中显示矢量并启用“比例”和“颜色”字段。
● 要缩放力、转矩或千斤顶矢量,以便在图形窗口中看到整个矢量,可以在“比例”字段中输入系数。系数默认值为 0.01。
● 如果要选择矢量在图形窗口中的颜色,可单击颜色框打开 Windows的“颜色”对话框。
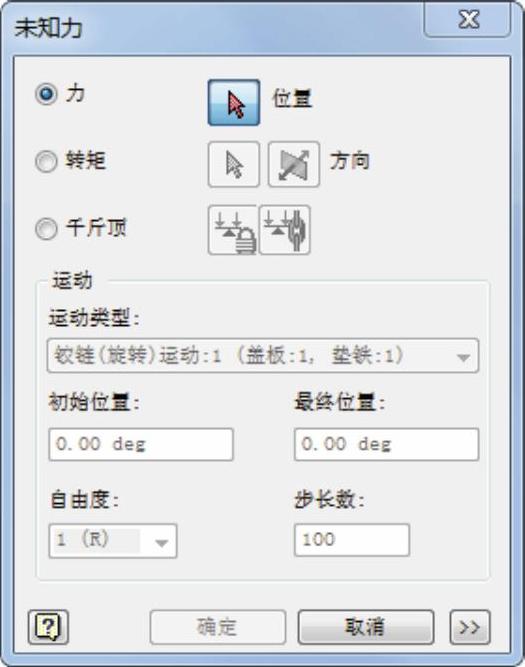
图12-19 “未知力”对话框
(8)单击“确定”按钮。输出图示器将自动打开,并在“未知力”目录下显示变量 fr'?' 或 mm'?'(针对搜索的力或转矩)。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







