1.步进电动机
步进电动机是一种将电脉冲信号转换成相应的角位移或直线位移的数字/模拟装置。步进电动机有旋转式步进电动机和直线式步进电动机两种。对于旋转式步进电动机而言,每当输入一个电脉冲后,步进电动机输出轴就转动一个角度(即步距角)。若输入连续的电脉冲信号,步进电动机就会一步一步地转动,且步进电动机转过的角度与输入脉冲个数成严格的正比关系。
(1)步进电动机的特点
1)输出角度与输入脉冲严格成比例,且在时间上同步。步进电动机的步距角不受包括电压、电流及波形等干扰因素的影响。转子的速度主要取决于脉冲信号的频率,总的位移量则取决于总脉冲数。
2)容易实现正、反转和起、停控制,起、停时间短。
3)输出转角的精度高,无积累误差。步进电动机实际步距角与理论步距角总有一定的误差,且误差可以累加,但是当步进电动机转过一周后,总的误差又回到零。
5)维修方便,寿命长。
步进电动机能够提供较大的低速转矩,一般可达5倍于相同尺寸的直流伺服电动机的连续转矩,2倍于无刷电动机的转矩。在某些场合,可以直接驱动机器人的关节,而不需要减速装置。
(2)步进电动机的类型和工作原理
根据转矩产生方式,步进电动机可分为永磁式、可变磁阻式和混合式三种。本例采用永磁式步进电动机,其结构原理如图9-2所示。
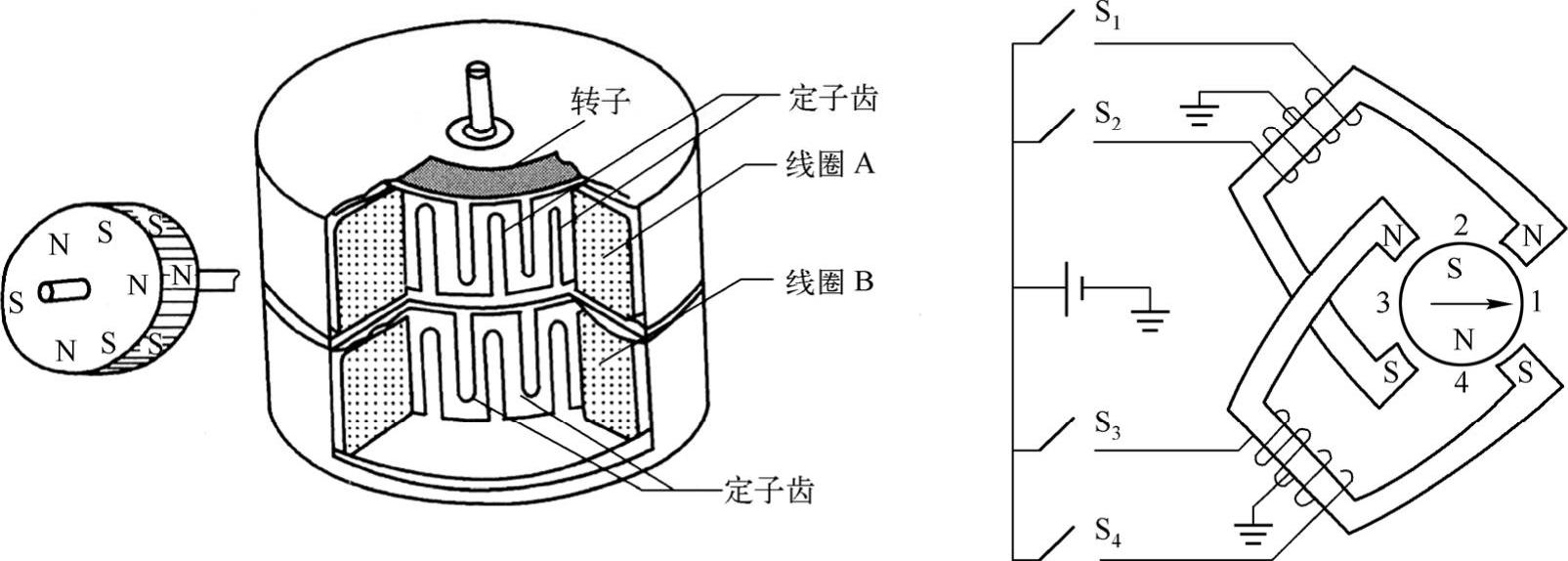
图9-2 永磁式步进电动机的结构原理图(www.daowen.com)
永磁式步进电动机的转子用圆柱形永磁铁制作,定子上有通电绕组。定子绕组通电激磁后,与转子永磁铁产生的磁场,根据同性相斥、异性相吸的原理驱动转子转动。永磁式步进电动机是低成本、低转速和低转矩的步进电动机,其步距角大,有共振效应,低速性能差,容易失步。永磁式步进电动机广泛用于计算机外部设备和仪器仪表行业。
2.步进电动机驱动器
步进电动机输出转角与输入脉冲个数严格成正比关系,能方便地实现正、反转控制及调速和定位。步进电动机不同于通用的直流、交流电动机,它必须与驱动器和直流电源组成系统才能工作。步进电动机的性能在很大程度上取决于“矩频”特性,而其“矩频”特性又与驱动器的性能好坏密切相关。步进电动机的驱动器包括脉冲分配器和功率放大器两个主要部分。
步进电动机的运转特性不仅取决于电动机本身所具有的机械特性和电气特性,而且取决于驱动电源的性能优劣。微型步进电动机尺寸小,使转子、定子、定子槽数受到限制。因此步进电动机步距角做得比较大,不利于精密位置控制。为了提高微型步进电动机的角分辨率,可以改进步进电动机的驱动方式,实现步距细分,用微步驱动。电压驱动主要分为电流斩波驱动和微步驱动。
3.编码器工作原理
旋转编码器是用来测量转速的装置。它分为单路输出和双路输出两种。技术参数主要有每转脉冲数(从几十个到几千个都有)和供电电压等。单路输出是指旋转编码器的输出是一组脉冲;而双路输出的旋转编码器输出两组相位差90°的脉冲,通过这两组脉冲不仅可以测量转速,还可以判断旋转的方向。
本例中利用编码器的A相和B相对轴进行高速计数功能,其原理如图9-3所示。

图9-3 编码器高速计数原理图
当A相处于上升沿而B相处于低电平状态时,计数器加1;当A相处于高电平而B相处于上升沿状态时,计数器加1;当A相处于下降沿而B相处于高电平状态时,计数器加1;当A相处于低电平而B相处于下降沿状态时,计数器加1。
相反,当A相处于低电平而B相处于上升沿状态时,计数器减1;当A相处于上升沿而B相处于高电平状态时,计数器减1;当A相处于高电平而B相处于下降沿状态时,计数器减1;当A相处于下降沿而B相处于低电平状态时,计数器减1。
本例采用这一原理对机械手实现精确的定位控制和方向的判断。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





