1.单回路PID调节
下面以冲压车间自动模式下冬季正常控温为例说明单回路PID控制算法程序的设计方法。根据表8-3的内存分配地址,PID指令的输入字是H14,表示被控温度实测值,本项目中的被控温度可选择送风温度或回风温度,由用户在NT31C上自行设置。PID指令的输出字为211,经D-A转换后控制热水阀开度(冬季管内流热水)。参考CP1H的PID指令参数表8-4,编写自动模式下冬季正常控温PID程序段如图8-40所示。
在图8-40中第一逻辑行主要用于设置部分PID指令参数(参考表8-5的内容),本例的相关参数设定值如下:
1)设定值C的通道设为D100,表示送风温度或回风温度的设定值(十六进制数)由用户在NT31C上设定十进制数(BCD码),采用SCL3进行量程转换,转换成十六进制数,存储在D100中。
2)比例带宽(C+1)带宽的设定值通道是D101,由用户在NT31C上设定,默认值设定为1000(精确到小数点后1位)。
3)积分时间(C+2)的设定值通道为D102,由用户在NT31C上设定,默认值设定为100s。
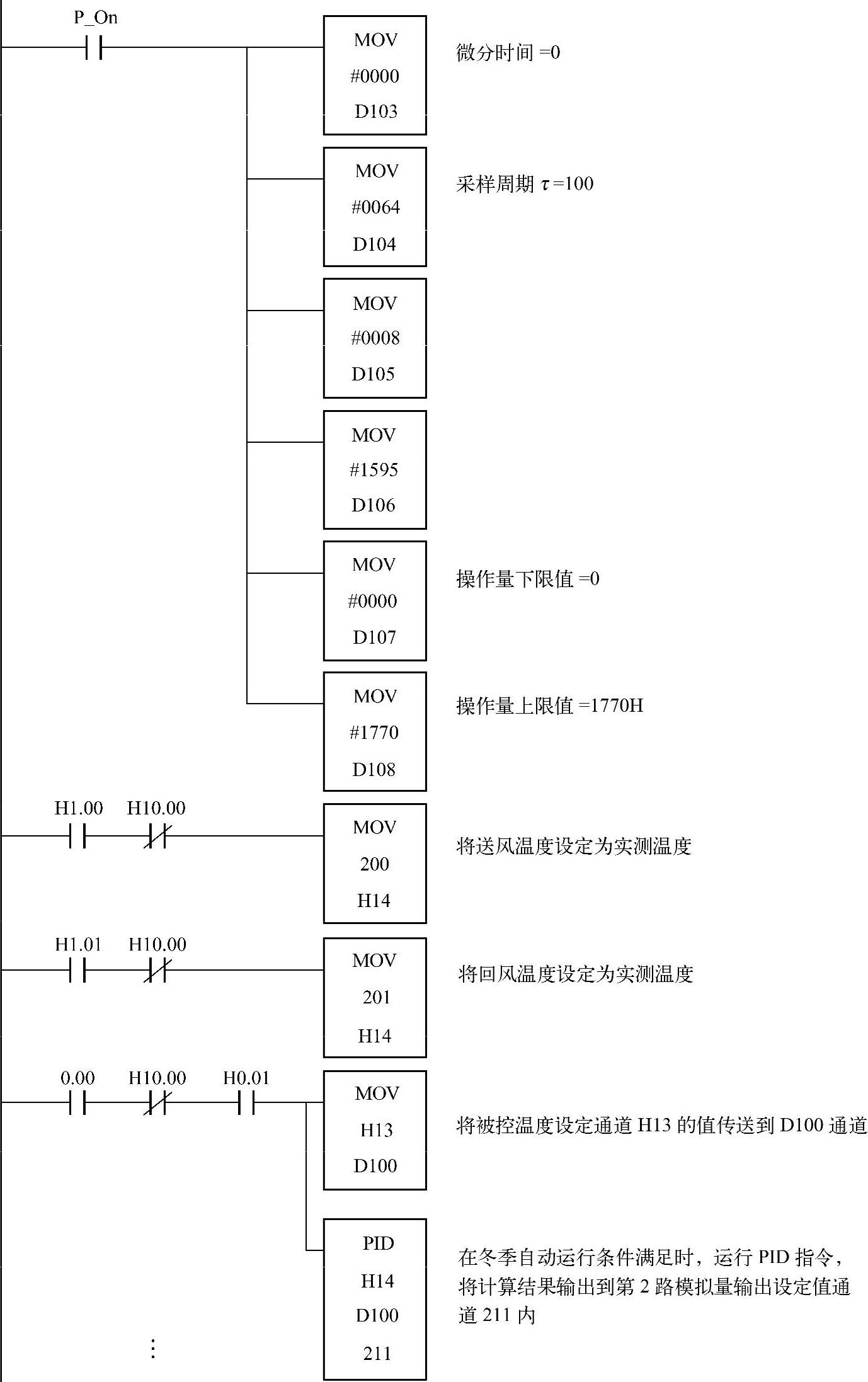
图8-40 冬季PID控制温程序段
4)微分时间(C+3)的设定值通道为D103,因本例不采用微分调节,因此D103的值设为0。
5)采样周期(C+4)取0.01~99.99s之间的数值,本例取τ=100,即为1s,因此D104的值设为64H(BCD码100)。
6)字C+5共设置4个参数,分别说明如下:
①字C+5的0位:比例作用方向设定(0:反向作用;1:正向作用)。
PID调节的方向是PID调节的重要参数,可根据实际情况选择正向调节或反向调节。无论是哪种控制方向,控制量MV都和设定值SV与采样值PV之差的增大而增大。正向调节和反向调节的判断如图8-41所示。
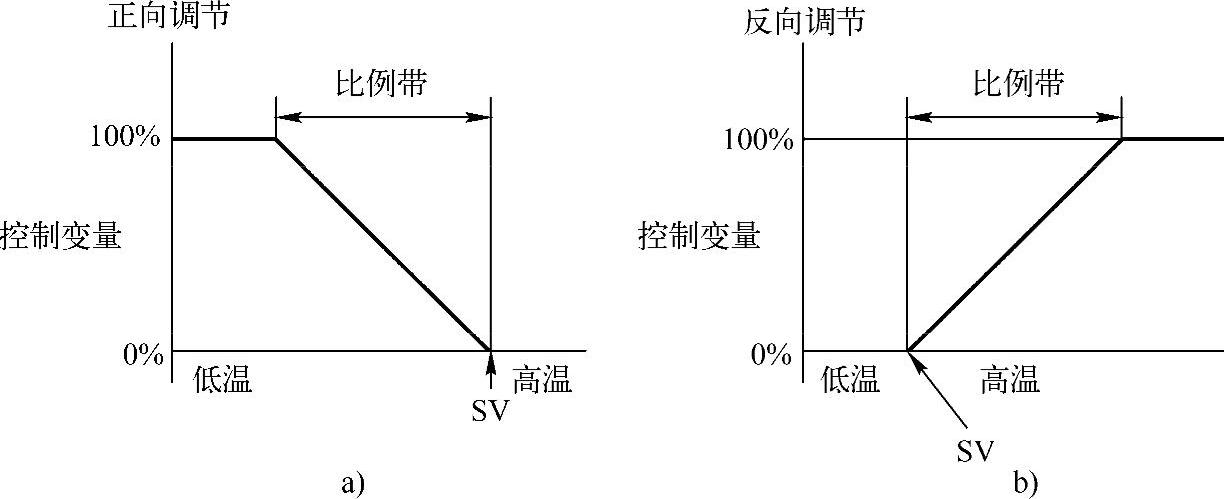
图8-41 PID正/反调节作用示意图
a)PID正向调节图 b)PID反向调节图
分析图8-41可以得出以下结论:
●正向调节是指当PV大于SV时,MV增加。
●反向调节是指当PV小于SV时,MV增加。
本例以冬季控温模式为例,为使送风温度或回风温度达到设定值,加热阀将开大,为反向作用。本例还涉及过渡季PID温度控制也属于反向作用,而夏季PID温度控制却是正向作用,读者可以自己分析采用何种作用。
②字C+5的1位:PID常数作用时间设定(取0或1)。
●取0:PID参数只能在指令开始执行时(即2-PID指令执行条件为ON时的上升沿)修改,就是说,每当2-PID指令执行条件为ON的上升沿时该指令就将用户设定的参数读入参数工作区;本例设定为0,就是说PID参数在指令执行的过程中不能修改。
●取1:PID参数既能在指令开始执行时修改,也能在每一采样周期修改。这就是说,每当2-PID指令执行前先将用户设定的参数读入参数工作区。(https://www.daowen.com)
③字C+5的3位:控制变量输出设定。
该值由用户在编程时确定,是指当PV等于SV时控制变量的输出值(0:输出0%;1:输出50%),本例设定为1。
④字C+5的04~15位:滤波系数α。
该值由用户在整定时确定,取值范围是100~163H(只写入二进制),对应的滤波系数α为0.00~0.99,另外α还有一个特殊值000H,这个值对应默认值α=0.65,这样规定是因为0.65这个值用得较多,本例取000。
⑤C+5的2位不用,取0。
7)字C+6共设置4个参数,分别说明如下:
①字C+6的0~3位:设定输出范围。输出范围用输出数据位数来表示(0:8位;1:9位;2:10位;3:11位;4:12位;5:13位;6:14位;7:15位;8:16位),因为本例输出数据将送到D-A单元,其分辨率为1/6000,数据位数是13位,故设定为5。
②字C+6的4~7位:设定积分与微分的时间单位(1:取采样周期倍数;9:设定时间,单位0.1s)。例如,积分时间设定为100,当积分和微分单位设定为1时,因本例中采样周期为1s,故积分时间为100s;如将积分和微分单位设定为9,则积分时间为100×0.1s=10s。
本例设定值为9,这样设置的好处是积分时间和微分时间的设置与采样周期无关,对于参数整定时采样周期有可能改变的场合,设定值为9比较合适。
③字C+6的8~11位:设定输入范围。输入范围用输入数据位数来表示(0:8位;1:9位;2:10位;3:11位;4:12位;5:13位;6:14位;7:15位;8:16位),因为本例输入数据来自A-D单元的13位数据(0~1770H),故设定为5。
④字C+6的12位:设定操作量是否加限值(0:无限值;1:有限值)。本例设定为1有限值,一般使用都应设定为1,以防止积分饱和。
⑤字C+6的13~15位不用,取0。
8)操作量下限值(C+7)取0000~FFFFH之间的数值,本例取0,因此D107的值设为0。
9)操作量上限值(C+8)取0000~FFFFH之间的数值,本例取1770,因此D108的值设为1770。
操作量上、下限与输出范围应满足:0≤操作量下限≤操作量上限≤输出范围最大值。
2.多回路PID调节
在某些场合实施多回路模拟量调节时,在使用PID指令时特别需要注意采样周期的差别设置。
例如天津某汽车厂的涂装车间空调机组除与冲压车间一样实施温度调节外,还需要实施湿度调节,因为涂装车间的湿度波动对汽车喷漆颜色影响很大,控制不及时将导致次品率明显上升。于是,在冬季需要使用两个PID指令分别对温度与湿度进行回路控制,PID指令参数设置参见表8-5,这两个PID指令的参数设置基本相同,PID调节方向均为反向调节。但是,若两个PID指令的采样周期均设定为1s,则在编程时需特别注意两个或两个以上PID指令不能在同一个CPU扫描周期中运行,即CPU在同一扫描周期内只能运行一个PID指令,因此为了使用两个PID指令能够有效地独立工作,必须编程实现二者的分时单独运行,且两个PID指令的运行间隔至少达到1个采样周期。涂装车间自动模式下冬季正常控温和控湿PID程序段如图8-42所示。
从图8-42可以看出,第一逻辑行中定时器TIM10(定时1.1s)和定时器TIM11(定时2.2s)构成了双稳态电路,使第二逻辑行中控制温度回路的PID指令与控制湿度回路的PID指令彼此间隔1.1s运行一次,从而有效地避免了同一时刻运行两个PID指令的“冲突”。
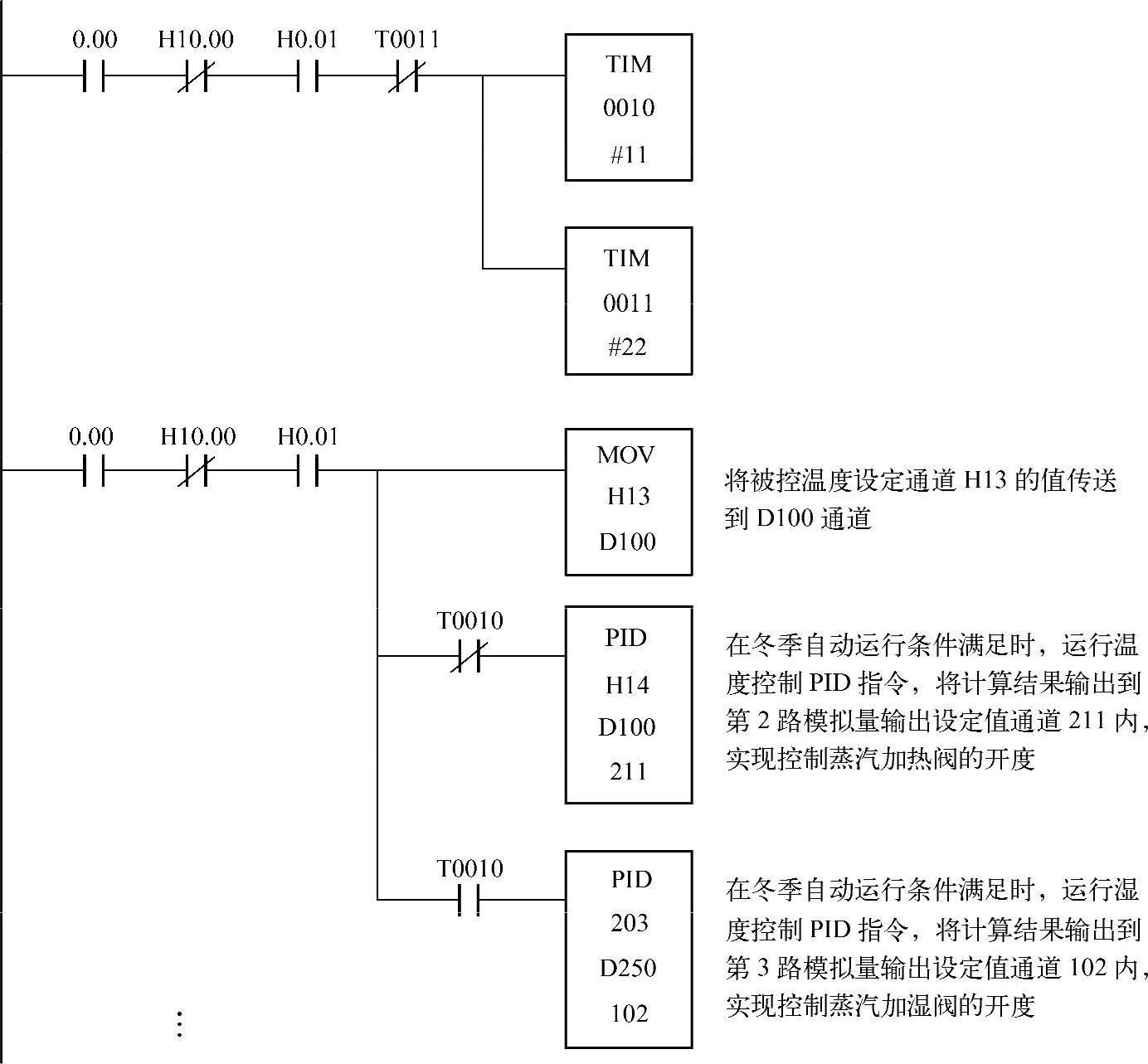
图8-42 涂装车间冬季PID控制温度与湿度程序段
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






