超声相控阵检测原理是:按一定的规则和时序用电子系统控制激发由多个独立的压电晶片组成的阵列换能器,通过软件控制相控阵探头中每个晶片的激发延时和振幅,从而调节控制焦点的位置和聚焦的方向,生成不同指向性的超声波聚焦波束,产生不同形式的声束效果,可以模拟各种斜聚焦探头的工作,并且可以电子扫描和动态聚焦,无需或较少移动探头,检测速度快,将探头放在一个位置就可以生成被检测物体的完整图像,实现了自动扫查,且可检测复杂形状的物体,克服了常规A型超声脉冲法的一些局限。
例如,采用普通单晶探头时声束扩散是单向的,由于移动范围和声束角度有限,因此容易将方向不利的裂纹或远离声束轴线位置的裂纹漏检;若采用超声相控阵探头,因为扫描声束是聚焦且可转向的,所以能以镜面反射方式检出随机分布在远离声束轴线位置上不同方位的裂纹,如图10-16所示。图10-16a中仅b处缺陷被检测到,而a和c两处缺陷在用常规单晶探头检测时会被漏检掉,而用阵列多晶探头时(见图10-16b),a′、b′和c′三处缺陷都不会漏检。
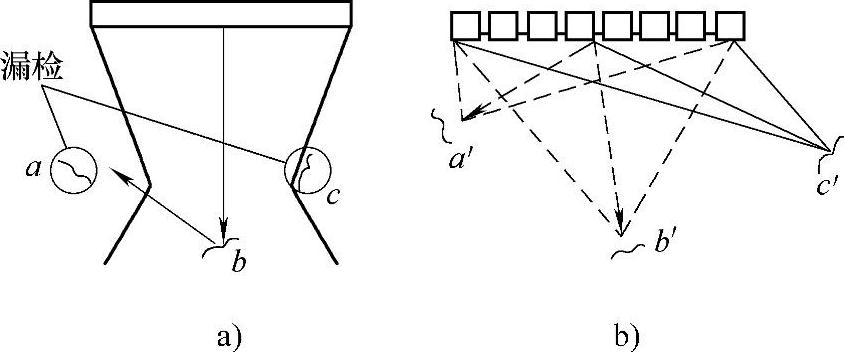
图10-16 常规单晶探头和阵列多晶探头对多向裂纹的检测比较
a)常规单晶探头检测 b)阵列多晶探头检测
1.超声相控阵探头设计参数
超声相控阵探头是相控阵检测技术的核心器件。它是由基于惠更斯原理设计的多个相互独立的压电晶片阵列(称为阵列单元,简称阵元)组成。其性能的好坏直接影响检测的可靠性及灵敏度。超声相控阵探头,一般由电缆、外壳、控制电路板、跨接线、阻尼材料、压电晶片和声匹配层七部分组成,如图10-17所示。
超声相控阵探头晶片是由比常规压电陶瓷材料探头的信噪比高10dB的复合材料制成的。用机械方法将复合材料大晶片切割成若干个小晶片,形成阵列探头。每个晶片都有各自的接头、延时电路和A/D转换器,晶片之间彼此声绝缘,每个晶片都可以单独激发。
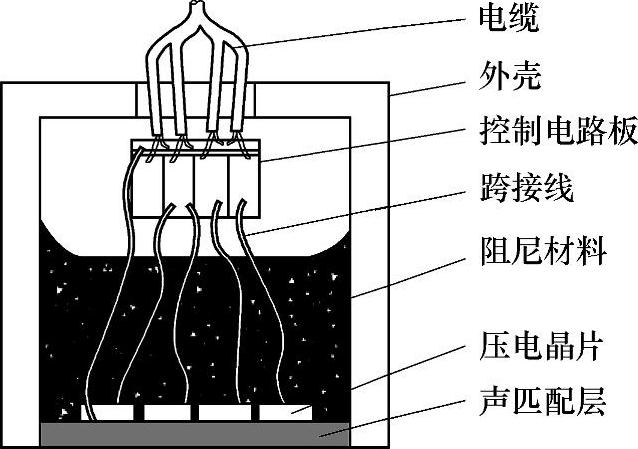
图10-17 超声相控阵探头的组成
由于超声相控阵探头的性能对检测结果的影响很大,因此探头的设计与制作是极为关键的技术之一。目前,在实际检测时,探头多为均匀线阵。对于超声相控阵探头的矩形压电晶片单元,其长度方向的尺寸应比超声波波长足够大,也比宽度、厚度足够大。这样,压电晶片的振动频率就取决于其厚度。通常在使用压电陶瓷时,应使晶片宽厚之比为0.35~0.65,以抑制宽度产生的振动。换言之,这样可得到只取决于厚度的纯厚度方向的纵向振动。若晶片宽厚比不在上述范围内,则需将整块晶片再进行细分。均匀线阵的超声相控阵探头的主要参数(见图10-18)如下:
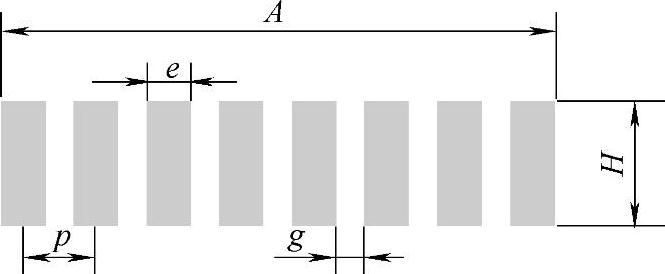
图10-18 相控阵探头设计参数
(1)晶片数量(n) 晶片数量的选择需从对灵敏度的要求、减少栅瓣和系统的复杂性等几方面综合考虑。晶片数量(即阵元数)的增加,可以使声束指向性更好。晶片数量越大,主瓣宽度就越小,旁瓣幅值也会变小。但是,大量的晶片和较大的晶片间距会降低相控阵的灵敏度,同时大大增加控制电路的复杂性。
(2)控制角度(θ0) 控制角越大,主瓣宽度就越大。在不带入栅瓣的情况下,控制角越小,阵元间距取值的上限就越大。所以在满足声束指向性要求和不带入栅瓣的情况下,若选取小的控制角,则可以选取更大的阵元间距值。
(3)晶片阵列方向孔径(A) 在探头其他参数一定的情况下,探头阵元数将会影响检测的孔径。通道数越多,阵列方向孔径就会越大,检测声束品质也就越好。其满足式(10-4)。

式中 K——阵列间距与波长的比值;
λ——波长。
(4)晶片加工方向的宽度(H) 阵元宽度将影响一级旁瓣的最大值。随着阵元宽度的增加,一级旁瓣的幅值增加,而且随着偏转角度的增加而增加,但当阵元间距小于半波长时,阵元宽度的影响非常小,尤其是当偏转角度较小时。在阵元间距一定的情况下,阵元宽度会影响相邻阵元间的间隙,改变相邻阵元间的等效电容,从而影响阵元间的相互干扰。
(5)阵元宽度(e) 阵元宽度是指单个压电复合单元的宽度。阵元宽度是对指向性影响最小的参数。增大阵元宽度可以增大在控制方向上的声压,获得更好的性噪比。适当增大阵元宽度值,会使旁瓣变小,但是变小的范围很有限。一般要求e<λ/2,并保持p<0.67λ,以免转向角增大时产生栅瓣。此外,根据英国新建模和R/D公司设计的探头,提出阵元芯距可大于波长,但转向程度必须受到限制。
(6)阵元芯距(p) 单元芯距是指相邻两阵元中心的间距,由式p=e+g给出。
(7)阵元间距(g)阵元间距又称为截口,是指相邻两阵元的声绝缘宽度。探头间距的选择需从对灵敏度的要求、减少栅瓣和系统的复杂性等几方面综合考虑,在不产生有害旁瓣的情况下,增加阵元间距,声束的指向性会更好。但是,阵元间距取值过大,会带入栅瓣。所以可以在不带入栅瓣的情况下,选取较大的阵元间距值。在控制角度θ0取值确定的情况下,阵元间距取值的上限为gmax=0.625λ。
(8)最大阵元尺寸(emax)最大阵元尺寸是指单个压电复合晶体的宽度,它取决于最大折射角αmax,即

良好的声束指向性不是由某一个参数来决定的,一般受几个参数同时影响。所以,应该在满足各个参数的基本要求下,并在给出的设计指标的约束下,选取最优的参数。
2.超声相控阵阵元排列方式
超声相控阵检测技术需使用阵元排成不同阵列的多阵元换能器来满足构件检测的需求。超声相控阵换能器的阵元排列方式分为线形阵列或两维(2D)阵列,目前主要有一维线形阵列、一维环形阵列、二维矩形阵列、二维圆形阵列四种常见形式。
一维线形阵列是指探头是由一组沿着一个轴并排的晶片组成的,它们可以使波束移动、聚焦和偏移一定的角度。这种形式是如今最常用的,如图10-19a所示。
二维矩形阵列是指探头是由一组沿着两个轴排列的晶片组成,并沿着两个轴分开的形式,在超声摄像检测设备中被采用,如图10-19b所示。
一维环形阵列是指将探头晶片配置成一组同心的环形,它们允许波束沿着一个轴聚焦在不同的深度,环形表面的区域一般是不变的,也就意味着每一个环形具有不同的宽度,如图10-19c所示。
二维圆形阵列是指相控阵探头由一组排列在圆上的晶片组成,只要给出波束入射必需的角度,这些晶片就能指引波束向圆内、圆外传播,也可以沿着圆的对称轴传播,如图10-19d所示。
与圆形阵列和环形阵列相比,线形阵列具有容易加工,发射、接收延迟控制电路较简单,容易实现等优点,可满足多数情况下的应用要求,因此在实际检测中使用较多。环形阵列在中心轴线上的聚焦能力优异、旁瓣低、电子系统简单,由于不能进行声束偏转控制,因此大多应用在医学成像和脉冲多普勒体积流量计中,其中二维分段交错环形阵列比较特殊,专门用于棒材的检测。二维阵列可对声束实现三维控制,对超声成像及提高图像质量大有益处。该系统具有实时C扫描成像功能,以标准视频图像在液晶显示器上显示。然而与线形阵列相比,二维阵列的复杂性剧增。目前加工工艺的限制及电路复杂和制作成本高,使二维阵列仍主要应用于医用B超上,经济适用性影响了该类探头在工业检测领域的应用。圆形阵列主要用于检测管子的内、外壁缺陷。
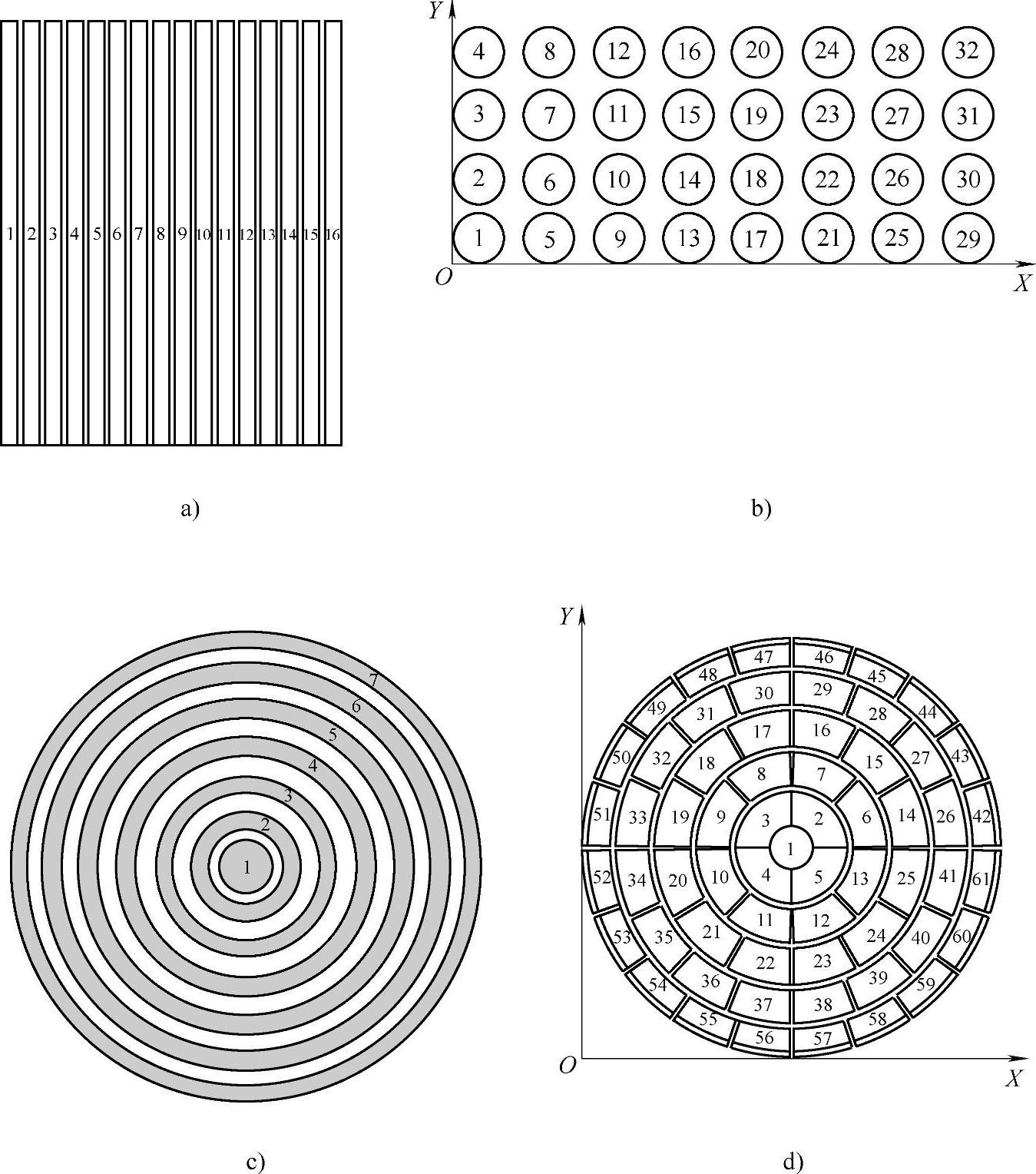
图10-19 常见的探头阵列几何外形
需要指出的是,传统的超声波探头和探头线是分开的两个部分,但相控阵探头由于连线内部太精密,所以往往将探头与连接线做成一体。根据检测对象的需要,也将相控阵探头做成各种不同的形状和尺寸。
3.超声相控阵扫描模式
由于超声波检测时需要对物体内某一区域进行成像,因此必须进行声束扫描。超声相控阵的扫描模式主要有线性扫描、扇形扫描和动态深度聚焦扫描三种。在检测时,应根据检测对象的特点和检测目的选择适合的扫描模式。下面以线形阵列探头为例介绍相控阵检测扫描的原理。
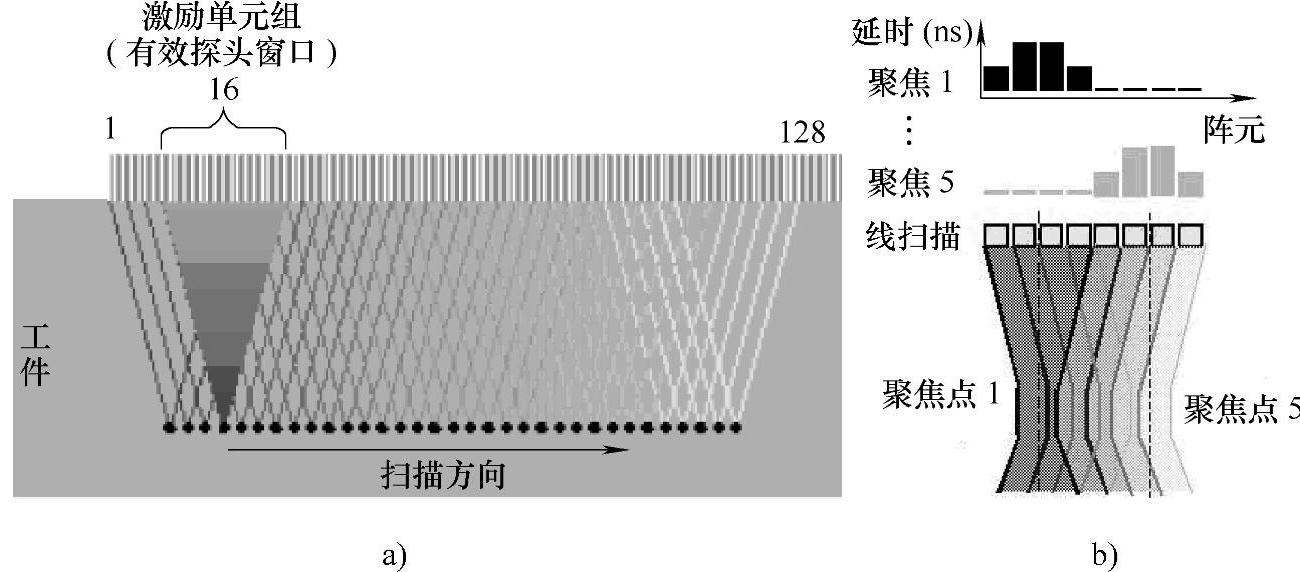
(1)线性扫描 线性扫描也叫E扫描、电子扫描,是指相控阵换能器阵元的激励时序从左到右,由若干个按相同聚焦率和延时率触发晶片阵列单元组成一组发射声束,通过控制阵列单元的激励,使声束以恒定角度,沿相控阵探头长度(所谓“窗口”)方向进行移动,进行平行线性扫查,如图10-20a所示。用斜楔时,对楔块内不同延时值要用聚焦率做修正。为了每个基本声波同时到达希望的声场聚焦点,延时规律是关于焦点对称的,如图10-20b所示。
 (https://www.daowen.com)
(https://www.daowen.com)
图10-20 线性扫描示意图
(2)扇形扫描 扇形扫描也叫S扫描、带方位角扫描,是指将阵列单元逐个等间隔地加入延时发射,对每一组晶片的延时和折射角度进行修正,使阵列中由相同晶片发射的声束合成的波阵面具有一个偏角的平面波(即相控阵偏转),并使某一聚焦深度在扫描范围内移动,通过改变延时间隔的大小,在一定范围的空间内进行不同聚焦法则的检测扫描,如图10-21所示。
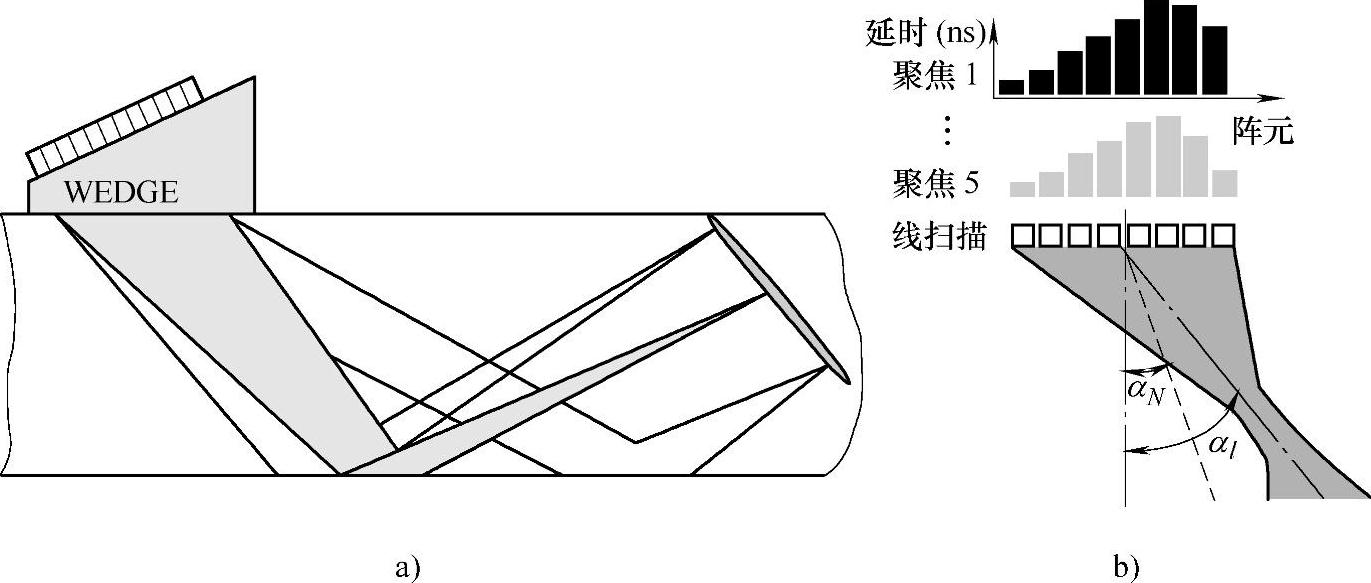
图10-21 扇形扫描示意图
在进行扇形扫描时,可以不移动探头位置而通过改变入射角就可检测整个待检工件。相控阵探头结合了宽波束探头和多焦点探头的优势,在检测表面复杂或空间有限的情况下大有用武之地,在进行涡轮叶片根部、多阶梯轴等难以接近的复杂型面的检测时发挥了其他检测方式所不具备的优势。
(3)动态深度聚焦 动态深度聚焦(DDF)是指通过控制阵列阵元发射信号的相位延时,使两端的阵元先发射,中间的阵元延迟发射,并指向一个垂直方向移动的聚焦点,使聚焦点位置的声场最强,并使超声束沿着声束轴线对不同聚焦深度进行扫描,如图10-22a所示。实际上,发射声波时使用单个聚焦脉冲,而接收回波时对所有动态深度重新聚焦。其延时与动态深度聚焦的关系如图10-22b所示。
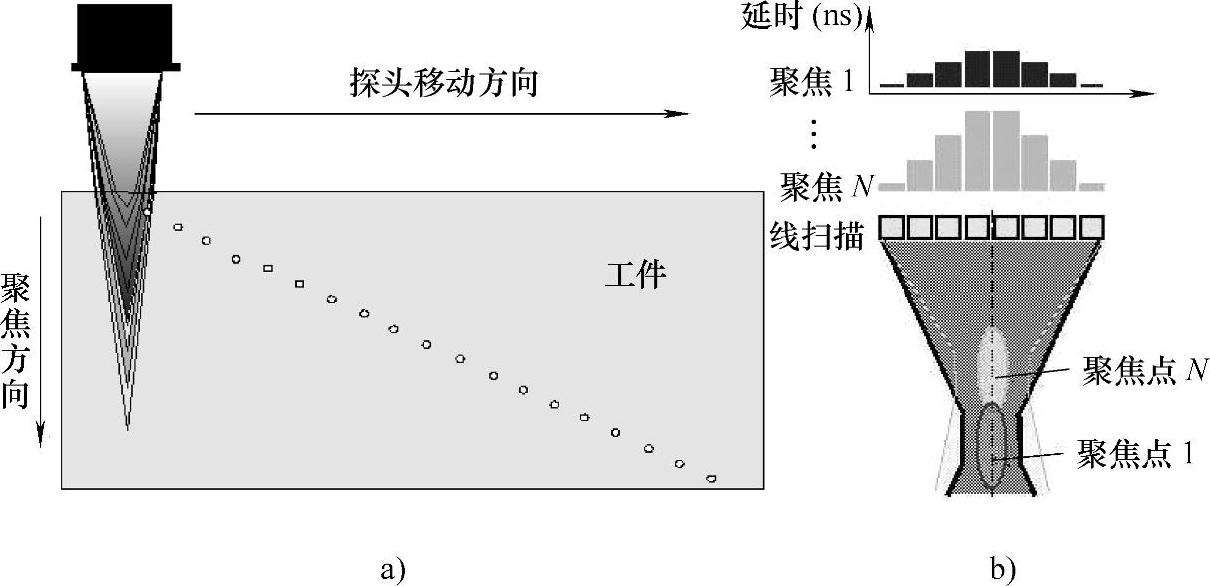
图10-22 动态深度聚焦示意图
普通的超声波聚焦探头可以将超声波聚焦在某一点处,从而可以在该点处获得最好的分辨率和灵敏度,但对不处于该位置的缺陷就没有这么好的分辨率和灵敏度了。相控阵探头的聚集位置是可以由计算机控制的,是动态可变化的,所以可在声程范围内设定聚集的范围。计算机可自动控制探头各个晶片发射和接收超声波,从而在该范围内进行动态聚集,所以聚集后是一条线。
超声相控阵探头晶片(阵元)的激励(振幅和延迟)均由计算机控制,声束角度、焦距、焦点等参数可通过预置软件进行调整。动态深度聚焦采用固定的激发脉冲序列,但在对接收脉冲信号进行相移处理时,采用多组相延迟序列。针对每组相延迟序列,可以通过计算得到这种相延迟所集中的反射信号来自的深度位置,同时将其他深度位置的信号屏蔽。这样得到的信号是有选择接收的信号,排除了来自其他深度和方向角反射的干扰,从而实现了类似聚焦的效果。改变阵列组合单元的延时值,可改变声束聚焦深度和声束角度,也能改变波形,由此可对方向性缺陷获得最佳的检测和定量结果。图10-23即为标准相控阵和动态深度聚焦对同一试块人工孔缺陷的检测图像。
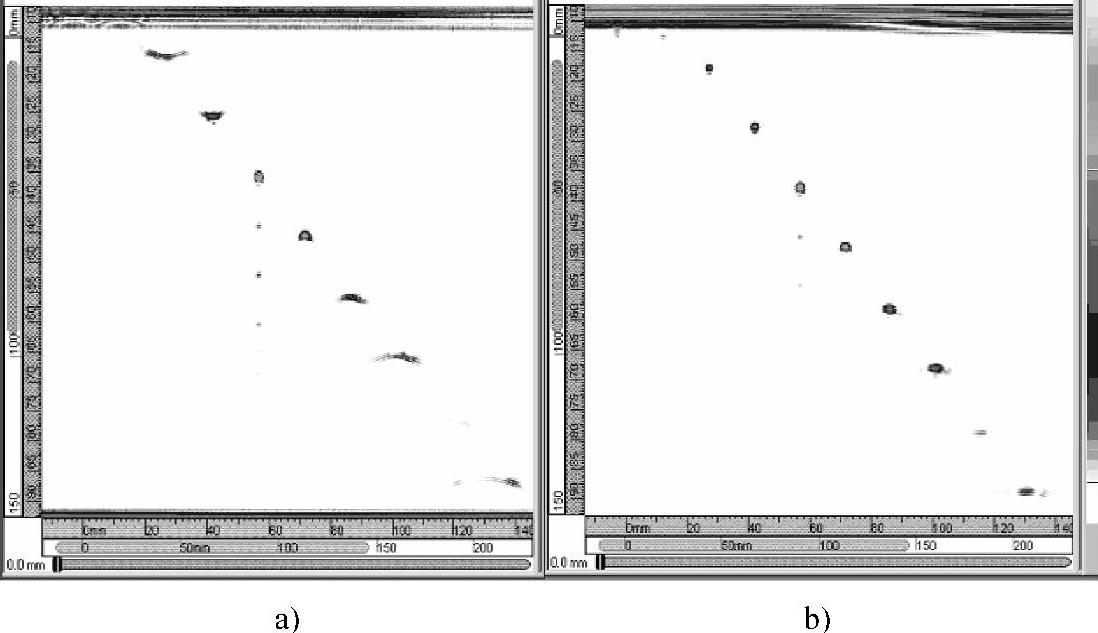
图10-23 相控阵检测图像
a)标准的相控阵 b)动态深度聚焦
4.数据显示
在相控阵检测仪对接收到的信号数据进行输出时,如果将θ声束方向上的各位置的信号值作为纵坐标,将深度作为横坐标,就可以画出A扫描图形。A扫描图形显示了材料中某一焦点的回波特性,也显示了材料中其他各点不同衰减的回波特性。
在A扫描的基础上,通过数据重构,从而形成B扫描、C扫描、S扫描等的图像显示。
(1)相控阵基本扫描与成像 在机械驱动的扫描过程中,按编码器位置进行数据采集,而数据显示则呈现不同的视图(见图10-24),包括A显示(直角坐标)、B显示(横断面)、C显示(水平投影)、D显示(纵断面)、S显示(扇形)、CT显示(切片)等扫描图形以及组合扫描图形,以供缺陷分析评定。
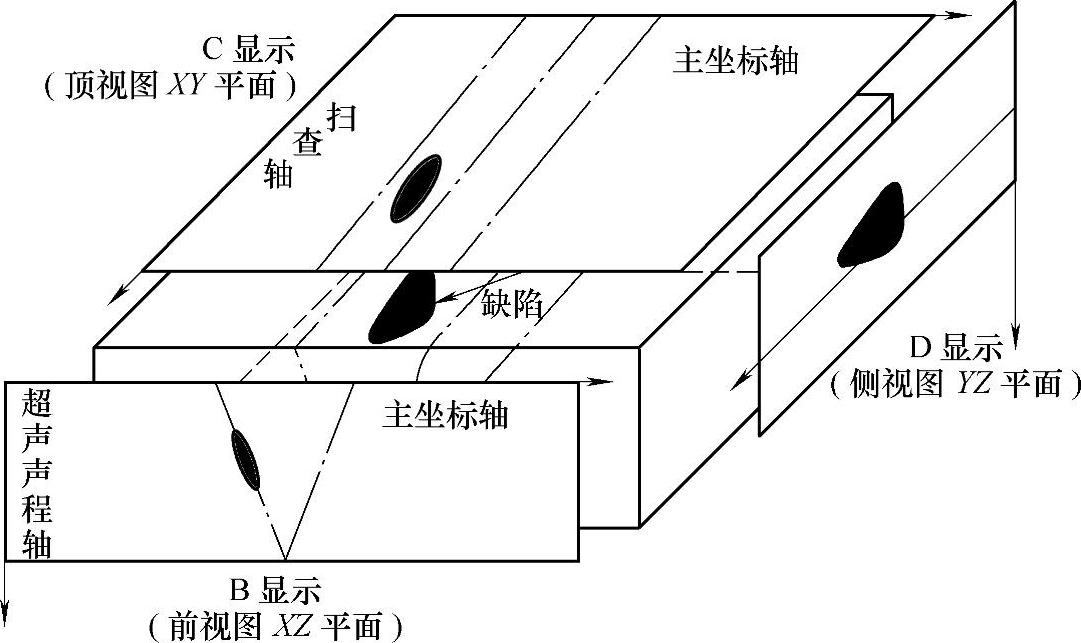
图10-24 相控阵检测结果显示的三视图
(2)A扫描显示 一般常用的A扫描显示(即直角坐标显示,横坐标代表声传播距离,纵坐标代表回波幅度)的内容是当探头驻留在试样上某一点时,沿试样深度方向的回波振幅分布。在日常手工超声检测中,采用的是所谓“全A扫描”的波形显示,所显示的是整个周期的最大回波幅度,也可只显示周期中特意选定的某一点k的A扫描波形,例如只显示反射体的声束入射角正好为45°的A扫描波形,或只显示声场中预定的焦深处的A扫描波形。单个A扫描波形一般在记录过程中的某一时刻,存储在仪器的存储器中。因此,所有A扫描波形可在实际检测后做“离线”单独评价。
(3)B扫描显示和D扫描显示 在超声相控阵系统中,假设压电阵元先发出前一个脉冲通过时得到的一维A扫描数据,然后发出下一个脉冲,依次类推,从而依次发出多个并列的脉冲,并利用相邻发射时间间隔测得每组晶片反射回来的一维A扫描数据,最终将多组维A扫描数据结合起来形成二维矩阵,即为B扫描。因此,B扫描所显示的是与声束传播方向平行且与试样的测量表面垂直的试样剖面。通常,水平轴表示扫查位置,垂直轴表示超声声程或传播时间,但根据显示要求,两轴可互换。
在声束作线性扫查的入射平面内,B扫描显示或断面扫描显示就会立刻出现在每个周期后。在扫查范围内接收到的所有回波,其回波幅度位置和大小显示与预定的彩码设定一致。若探头还沿与声束扫查方向相垂直的方向移动并记录探头位置,则仪器就会以切片形式存储检测结果,最后获得一定体积的检测结果,必要时,甚至能产生试样的三维(3D)显示图像。当用编码器进行扫查时,缺陷回波坐标能以三维形式表示,因此检测结果也可获得第三视图,即在试件XZ坐标平面上垂直于纵、横两个扫查方向的投影。注意,检测结果的这种图像显示,在大多数情况下不称为B扫描显示,而称为D扫描显示。当检测对象为对接焊缝时,由D扫描显示即可测出缺陷在焊缝轴线方向的长度。超声相控阵检测时的A、B、C、D扫描显示图像如图10-25所示。
(4)C扫描显示 C扫描显示是被检试样的顶视图,即存储在所显示的体积范围内的回波投影到试样表面。这里可能有两个变量,即回波幅度和声程,均可进行彩色编码或灰度等级显示。
(5)S扫描显示 在B扫描基础上同时改变声束的传播角度,测出在不同角度上的二维矩阵,则形成扇形(S形)成像显示。S扫描是超声相控阵检测所独有的。它利用同组压电元件,通过编程改变时间延迟来控制波束,并通过一系列角度来实现扫查。
从某种意义上讲,S扫描也是一种B扫描,但只表示探头在一个周期中扫查的实际声束角度范围,如图10-26所示。S扫描是治疗诊断中常用的显示。在焊缝检测中,所有的反射体都是在声束变角的声场范围内扫查显示的。在需要时,扫查显示还应包括声束在平板底面的反射状态,即所谓二次波(1.0S波)的形貌(扇面反射——体积校正的扇面显示)。
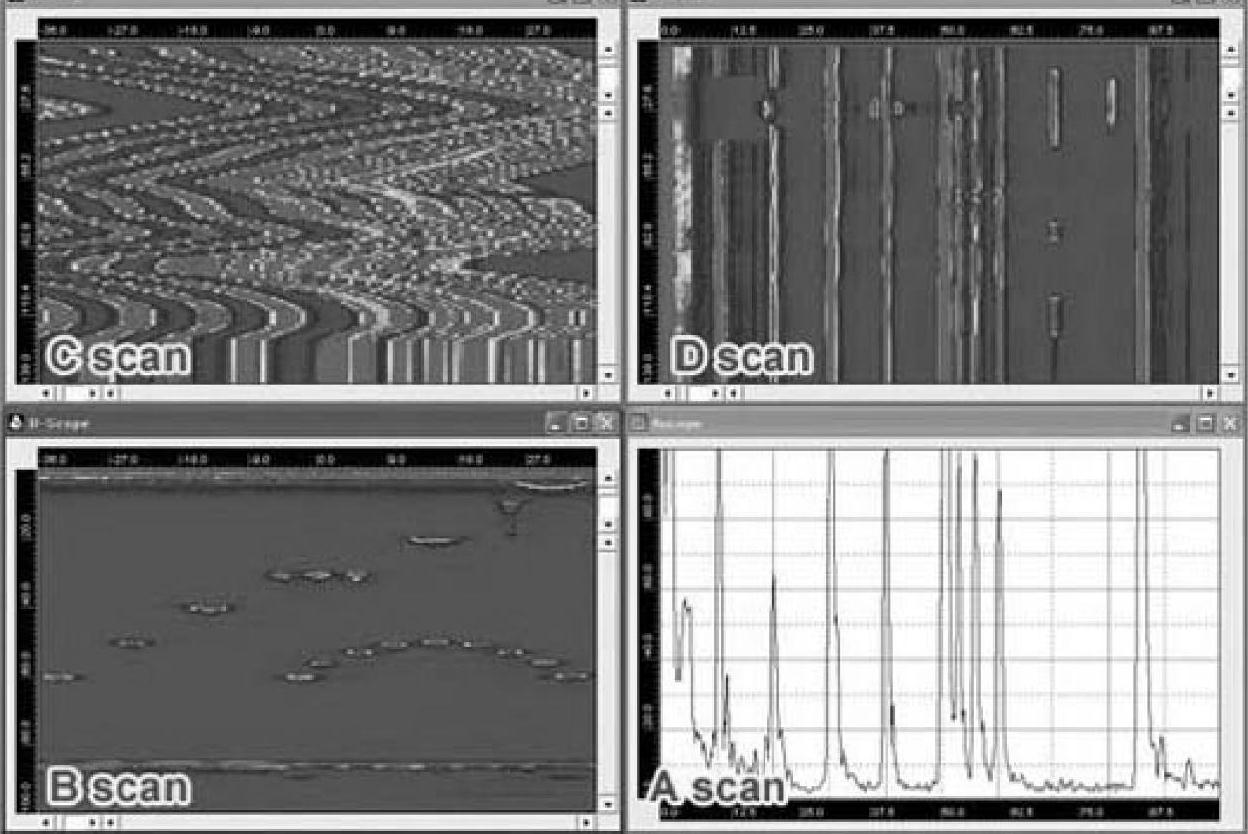
图10-25 超声相控阵检测时的A、B、C、D扫描显示图像
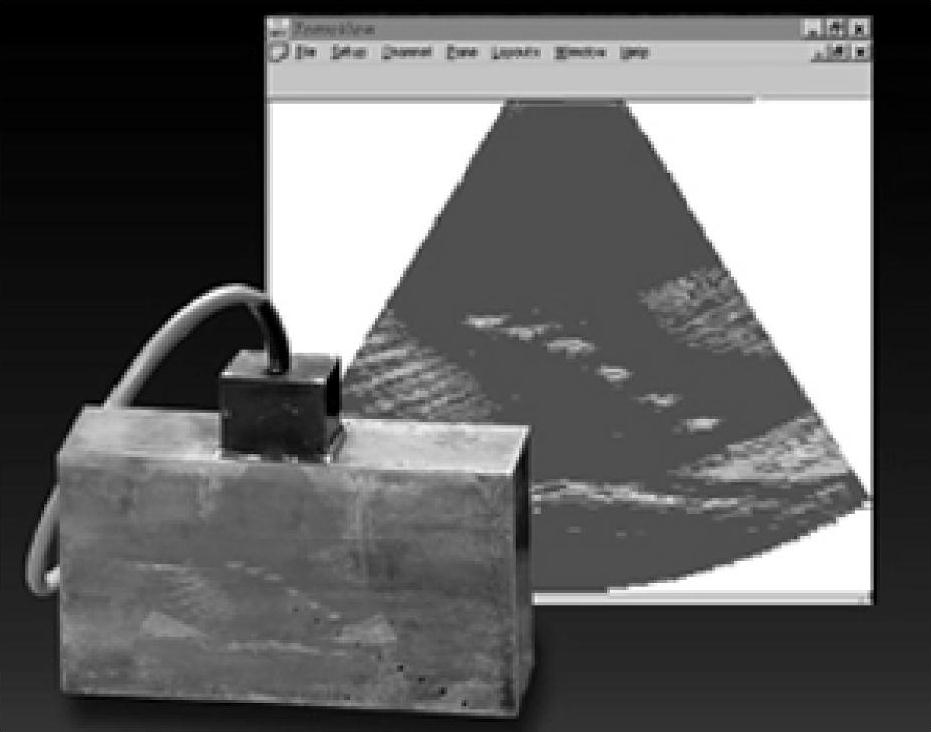
图10-26 超声相控阵检测S扫描显示图像
S扫描能产生整体检测图像,由此可快速获取超声波在所有方位检测到的试样形貌或缺陷相关信息。
将试样数据标绘在二维(平面)图即所谓的“校正的S扫描图”上,能使超声波检测结果的分析和评定简单明了。
S扫描有以下优点:
1)能在扫描过程中显示图像。
2)能显示实际深度。
3)能由二维显示再现体积。
(6)组合扫描显示 在探头移动过程中,将线性扫描、S扫描与多角度扫描组合在一起,就能改进成像结果,获得整体检测图像,既可利用二维坐标对缺陷进行定位定量,也可借此还原再生体积图像。S扫描显示与其他视图相结合,可构成缺陷成像图或者识别图。图10-27所示为角槽、球孔、柱孔和横孔的超声相控阵S扫描结果。
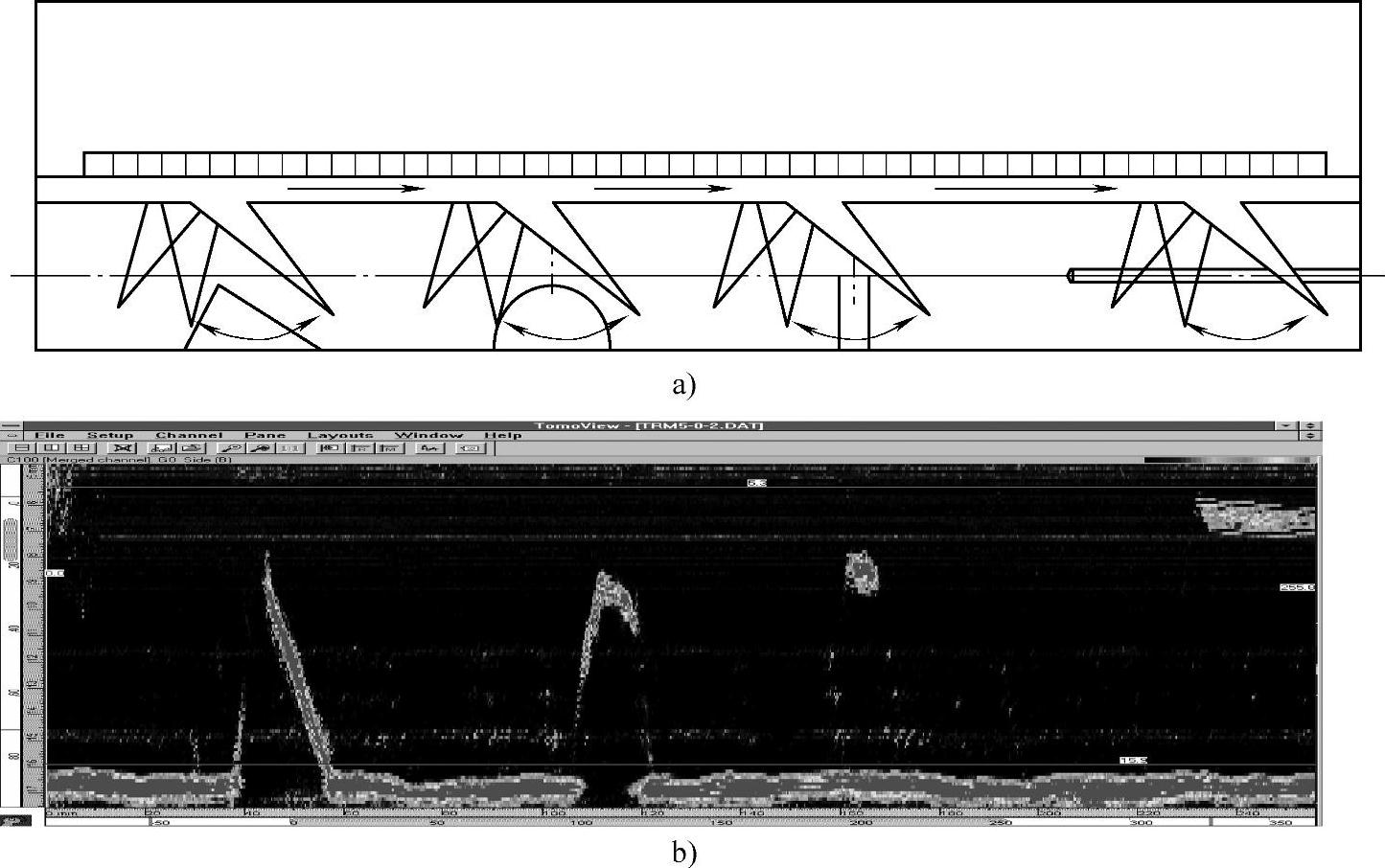
图10-27 角槽、球孔、柱孔和横孔的超声相控阵S扫描结果
a)缺陷和声束扫描示意图 b)信息归并后的B扫描显示图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






