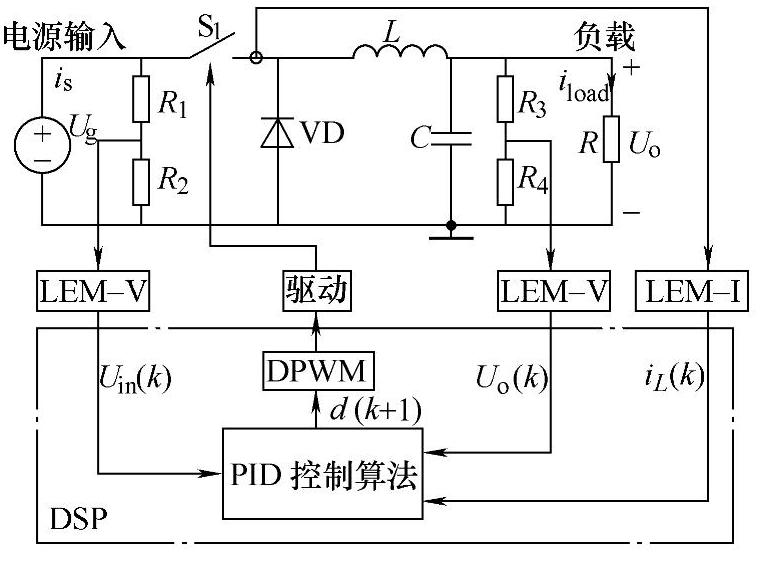
图4-98 基于DSP数字控制的Buck变换器系统图
1.变换器的结构与仿真
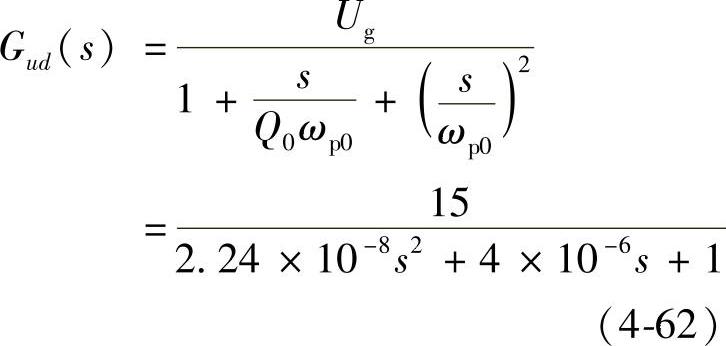
图4-98所示为基于DSP数字控制的Buck变换器系统示意图。主电路为Buck变换器,控制电路采用DSP,控制策略采用传统的PID。其中Buck变换器的参数为:已知Ug=15V,U=5V,RL=10Ω,L=40μH,C=560μF,fs=30kHz。用交流小信号建模方法,根据已知参数可得Buck变换器控制-输出传递函数为:
式中,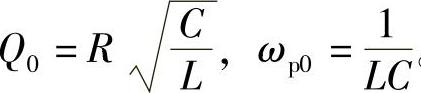 。系统的开环增益K=15,阻尼比ξ=0.0134,品质因数Q=37.42,自然谐振角频率ωp0=6.68×103rad/s。
。系统的开环增益K=15,阻尼比ξ=0.0134,品质因数Q=37.42,自然谐振角频率ωp0=6.68×103rad/s。
2.系统开环时域特性仿真
根据式(4-62),可通过仿真了解系统的开环特性。首先编写Matlab命令语句如下:
num=15;
den=[2.24e-84e-61];
step(num,den)
将上述命令输入到Matlab环境,运行可得如图4-99所示的阶跃响应曲线。由图可见:上升时间短,系统的阻尼比过小,其计算值为ξ=0.0134,系统的品质因数过大,其计算值为Q=37.42,超调量过大,本例中接近200%。超调量过大,将会导致系统能量损耗较大,同时调节时间增长。为了改善系统的动态性能和稳态性能,应该为其设计合适的控制器。
图4-99 系统开环阶跃响应曲线
3.系统开环频域特性仿真
方法1:用前面介绍的对开关网络建模的方法,在OrCAD/Capture界面中建立CCM1平均开关网络的PSpice子电路模型,将所建的子电路CCM1嵌入到PSpice用户库中,即可像其他元器件一样调用。Buck变换器控制-输出传递函数的仿真电路如图4-100所示。图中,在表示占空比的直流电压源V2上叠加了一个幅值为10mV的低频交流扰动电压源V2,其仿真控制-输出传递函数所用的表达式为

Buck变换器控制-输出传递函数的频率特性如图4-101所示,从图中可见,穿越频率fc=4.2489kHz,相角裕量φm≈0°,可见系统处于临界稳定状态,无法正常工作,需设计相应的控制器。
方法2:将式(4-62)输入到Matlab仿真软件中也可对系统开环频率特性进行仿真。
将式(4-62)用Matlab语句编程仿真,需编制Matlab语句如下:
numC=[15];
denC=[2.24e-84e-61];
sysC=tf(numC,denC);
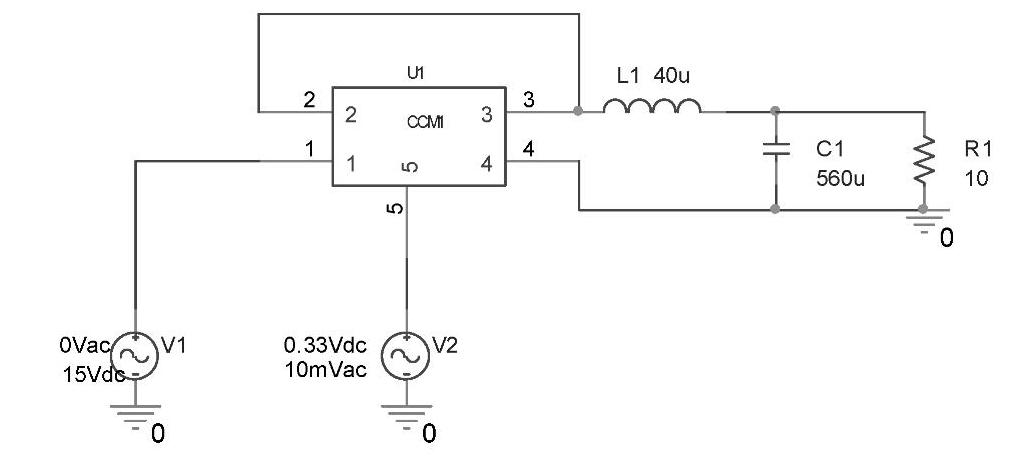
图4-100 Buck变换器控制一输出传递函数的仿真电路
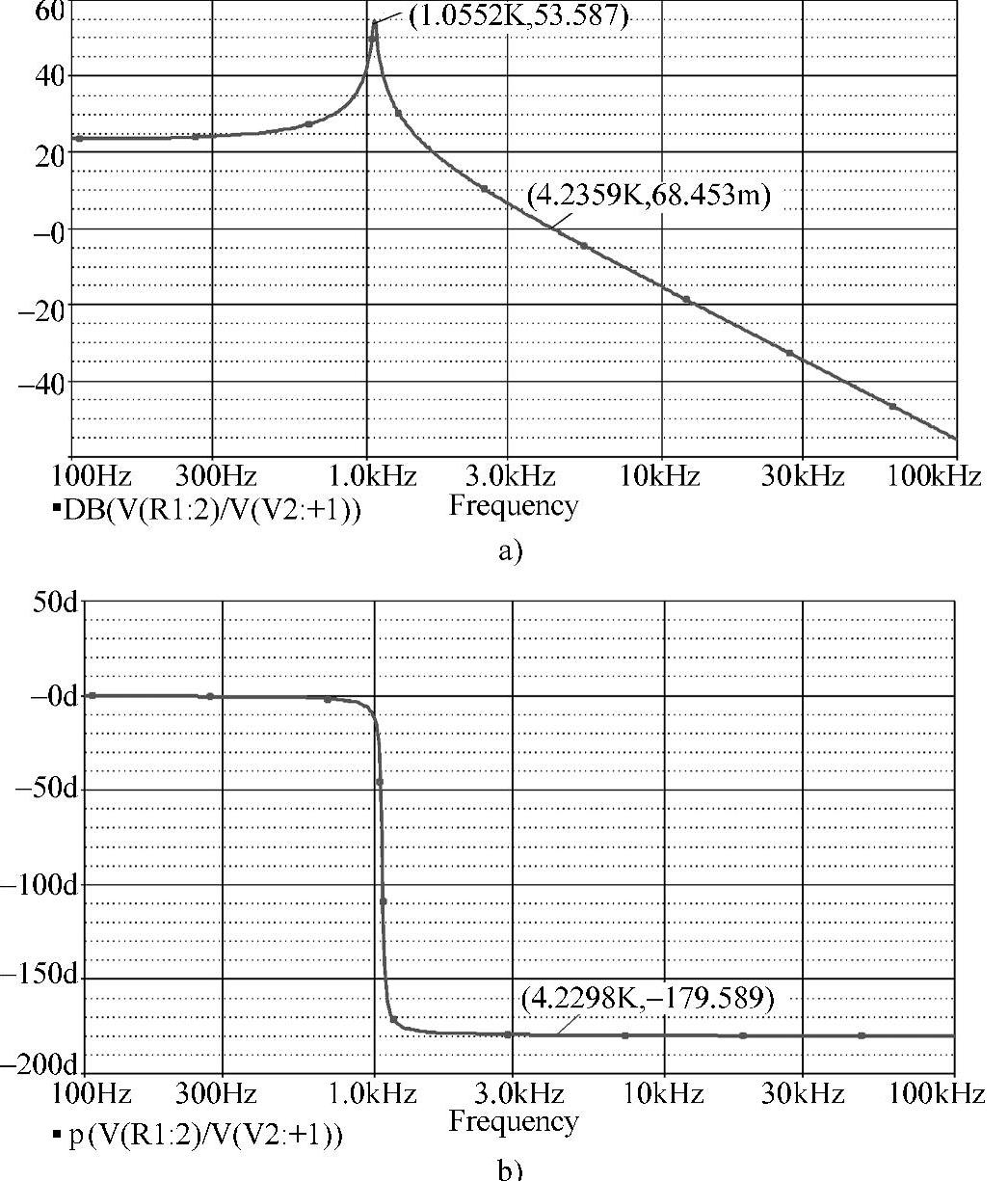
图4-101 用PSpice仿真的Buck变换器控制-输出传递函数的频率特性曲线
figure(1),bode(sysC),grid on;
将上述命令输入到Matlab环境进行处理,运行后得到图4-102所示曲线。比较图4-101和图4-102可得出两种方法都可用于仿真系统的开环频率特性。
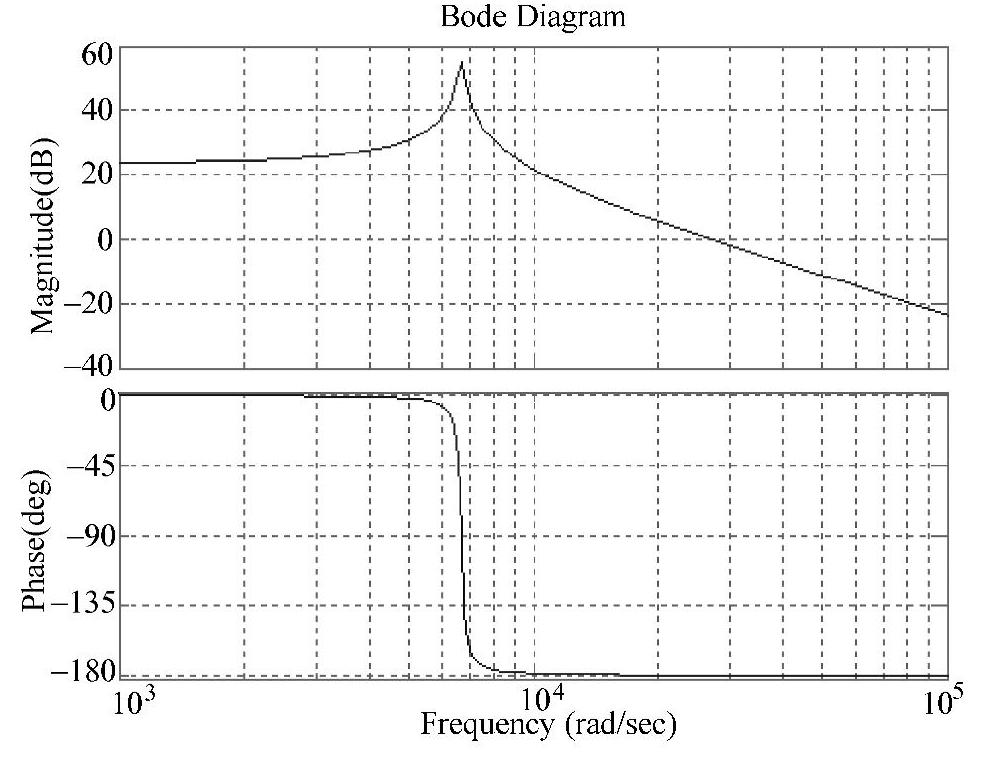
图4-102 用Matlab仿真的Buck变换器控制-输出传递函数
值得一提的是,也可将式(4-62)输入到Mathcad仿真软件中,同样可得到系统开环频率特性,此处不赘述。设计者可根据对各仿真软件的熟悉程度,选择不同的仿真方法来获得系统开环频率特性。
开关调节系统的稳态性能主要取决于开环传递函数博德图的低频段,要求其直流增益无限大、以-20dB/dec的斜率下降;动态性能主要取决于开环传递函数博德图的中频段,要求幅频特性以-20dB/dec斜率下降并穿越0dB线的频段,有适当大的中频带宽h和合适的穿越角频率ωc;在高频段,理想幅频特性应以-40dB/dec斜率下降。理想开环传递函数的频率特性如图2-11所示。为了得到系统的理想特性,需要为该系统添加控制器以调整系统频率特性。
图4-101a所示的仿真特性显然不符合理想开环传递函数的频率特性,因此,要设计控制器对系统进行补偿。
4.数字控制器设计与系统仿真
本文以数字PID为讨论对象。设根据GB/T 14714—2005《微小型计算机系统设备用开关电源通用规范》对输出电压为5V的电源指标为设计指标,该标准指出,暂态恢复时间最大值应小于50ms,最小调节范围±5%。本例中U+ΔU=5±0.01V,则本例的设计指标为
超调量:σ≤0.2%;调节时间:ts<50ms。
(1)PID控制
加入PID控制器后开关调节系统的结构示意图如图4-103所示。图中,Gud(s)是Buck变换器从控制-输出的传递函数,PID是需要设计的控制器。
设PID控制器的传递函数为Gc(s),则有

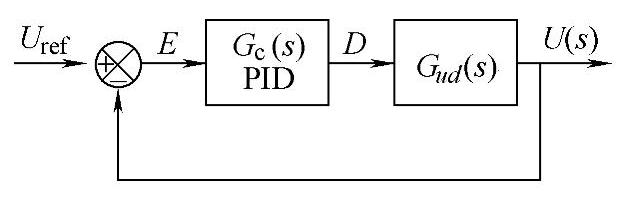
图4-103 控制系统结构图
PID控制的实质是:控制器分别对误差信号进行比例、积分与微分运算,用运算结果的加权和构成系统的控制信号D(s),从而对被控对象进行控制。P(Proportional):比例控制是最简单的控制结构,但它也能使系统满足某一方面的特性要求,如GM、PM、稳态误差等;D(Differential):加入微分控制,增加阻尼作用;I(Integral):加入积分控制,则增加了系统的稳态误差精度[48]。
(2)用仿真分析方法确定KP、KI和KD
PID控制器的设计的关键在于确定KP、KI和KD这三个参数。而这三个参数一般是根据经验来确定,但对于初学者在没有实践经验的情况下,可参照文献[48]的方法确定这三个参数。这里利用Matlab仿真工具,用仿真分析的方法来选定参数,确定KP、KI和KD,以提高PID控制器设计的效率。
1)确定KP值
关于KP的确定,首先可以根据根轨迹找出K限点,然后利用阶跃响应确定KP大致范围,从而获得系统闭环稳定的增益范围。为了获得KP的大致范围,需编制Matlab语句如下:
G=tf(15,[2.24e-84e-61]);
KP=[1:4:20];
for i=1:length(KP)
G_c=feedback(KP(i)*G,1);
step(G_c),hold on
end
figure;rlocus(G),axis('spuare');
k=rlocfind(G)
将上述命令输入到Matlab环境进行处理,运行后得到如图4-104和图4-105所示的曲线。由图4-104可知KP的取值范围不得小于0.0112。将如图4-105所示的阶跃响应曲线放大,可看出第3至第4条曲线的KP值在9~13的情况较好。本设计暂定KP=10。从图4-105所示中还可得出本系统只采用比例调节是无法达到设计要求的,还需加入积分调节和微分调节。(www.daowen.com)
2)确定KI值

图4-104 系统的根轨迹
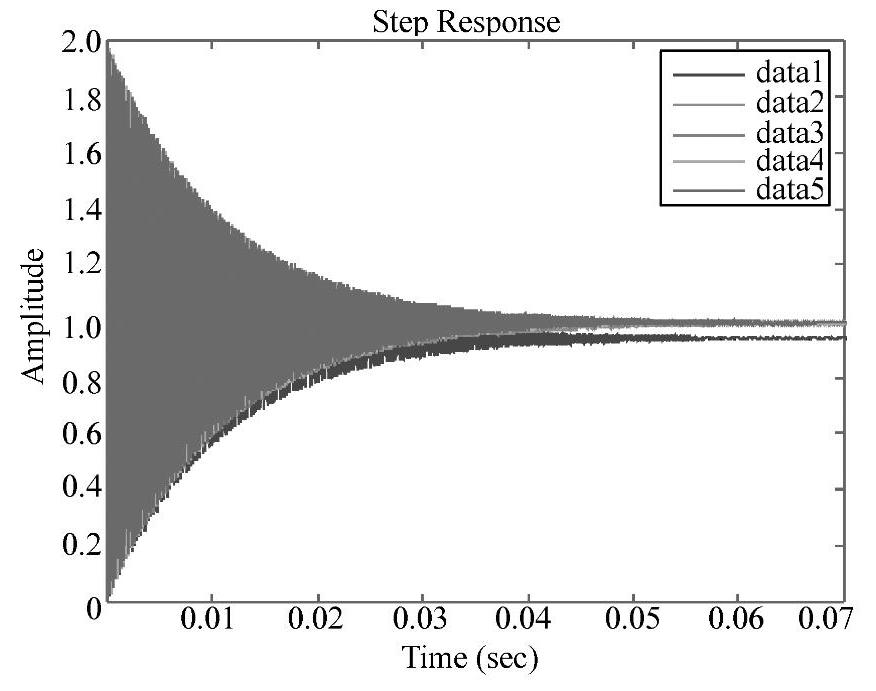
图4-105 不同KP值下的闭环系统阶跃响应
在确定了KP后,需确定积分系数KI。为了获得KI的大致范围,需编制Matlab语句如下:
G=tf(15,[2.24e-84e-61]);
KP=10;
KI=[1e-3:2e-3:1e-2];
for i=1:length(KI)
Gc=tf([KP,KI(i)],[1,0]);
G_c=feedback(G*Gc,1);
step(G_c),hold on
end
将上述命令输入到Matlab环境进行处理,运行结果如图4-106所示。从图中局部曲线放大可以看出第2至第3条曲线的KI取值范围在0.003~0.005之间的情况较好,因此取KI=0.003。
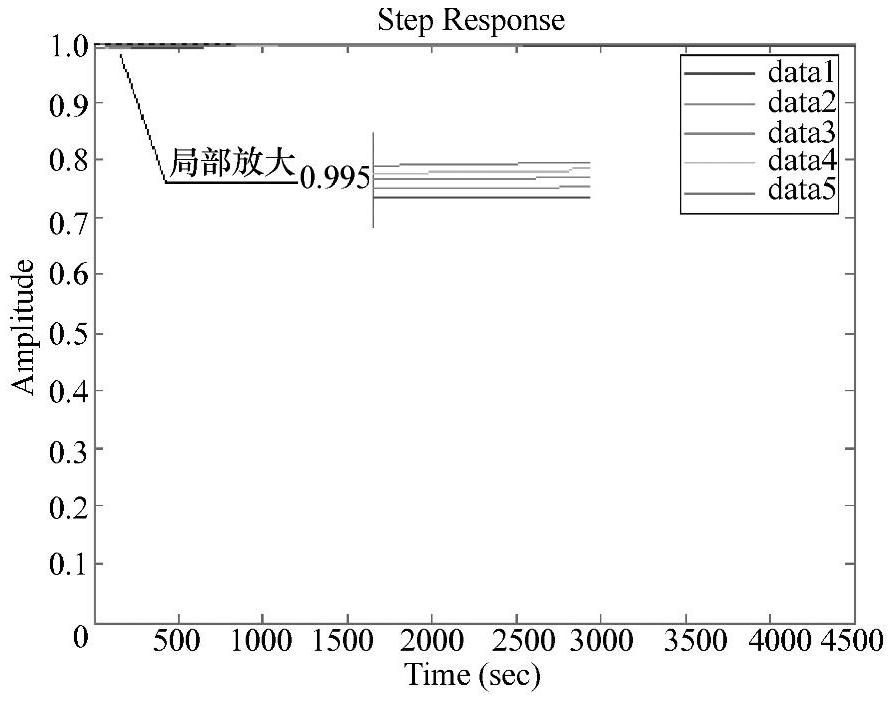
图4-106 PI控制下闭环系统阶跃响应曲线
3)确定KD值
选定了KP=10和KI=0.003后,可确定KD值,为了获得KD的大致范围,需编制Matlab语句如下:
G=tf(15,[2.24e-84e-61]);
KP=10.0;KI=3e-3;KD=[1e-3:2e-3:1e-2];
for i=1:length(KD)
Gc=tf([KD(i)KP KI],[1,0]);
G_c=feedback(G*Gc,1);
step(G_c),hold on
end
将上述命令输入到Matlab环境进行处理,运行结果如图4-107所示,从图中可看出KD的取值在0.003左右较好,因此取KD=0.00222。
(3)采用PID校正后系统闭环仿真
在确定了PID控制器的KP、KI和KD三参数后,为了获得校正后系统的闭环阶跃响应,根据图4-103所示的系统,可编制如下程序:
G=tf([15],[2.24e-84e-61]);
KP=10;KI=0.003;KD=2.22e-3;
Gc=tf([KD KP KI],[1,0]);
G_c=feedback(G*Gc,1,-1);
step(5*G_c,0.0001),hold on
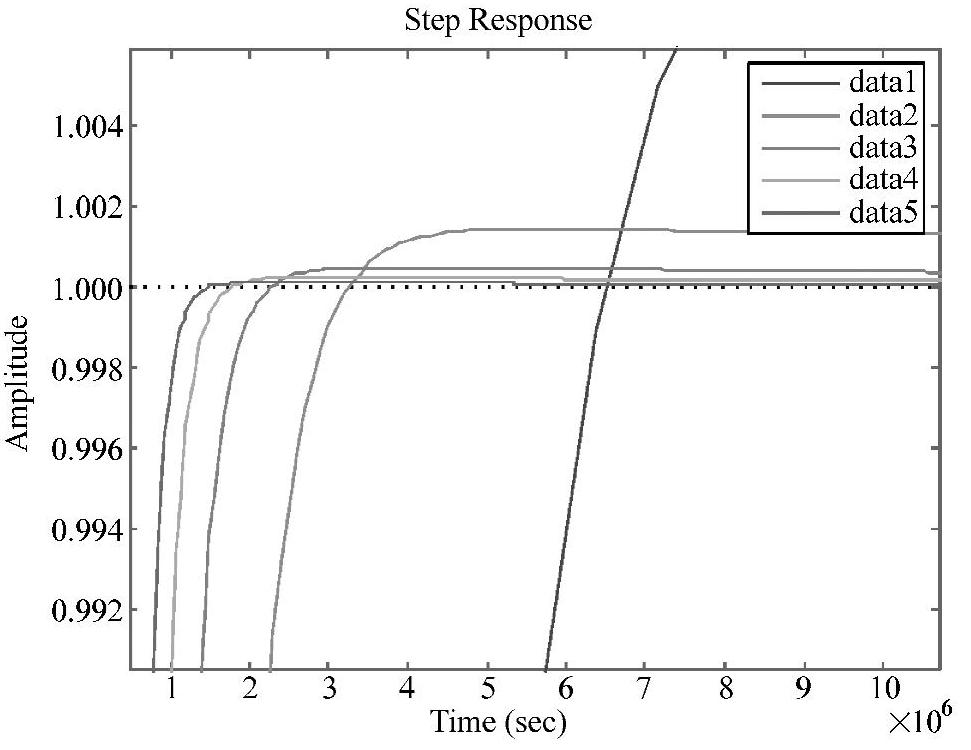
图4-107 PID控制下闭环系统阶跃响应曲线
将上述程序输入Matlab环境下运行,可得到如图4-18b所示的阶跃响应。为了得到更直观的输出电压为5V的阶跃响应,在上述阶跃语句中乘了系数5。
图4-108a所示是未加入PID控制系统的闭环阶跃响应,比较如图4-108a和b所示的系统闭环阶跃响应,加入PID后系统可得到满意的闭环响应特性。从如图4-108b所示可见,超调量为0.2%;调节时间为5.8×10-2ms<45ms,满足设计指标。由此可得到PID控制器传递函数为

经补偿后系统开环传递函数为

计算机控制是一种采样控制,连续PID算式中的积分、微分运算只能用数值计算方法逼近,只要采样周期Ts取得足够小,这种逼近可以相当精确[48]。本例中采样周期为3.3×10-5s,可以满足精度要求。
将微分项用差分代替,积分项用矩形和式代替,则数字PID算式为

其中:kp=Kp,ki=KpTs/Ti,kd=KpTd/Ts。
递推PID算式为:
d(k)=d(k-1)+q0e(k)+q1e(k-1)+q2e(k-2) (4-68)
其中:q0=kp+ki+kd,q1=-kp-2kd,q2=kd。
经计算得:q0=77.27,q1=-144.54,q2=67.27,则有
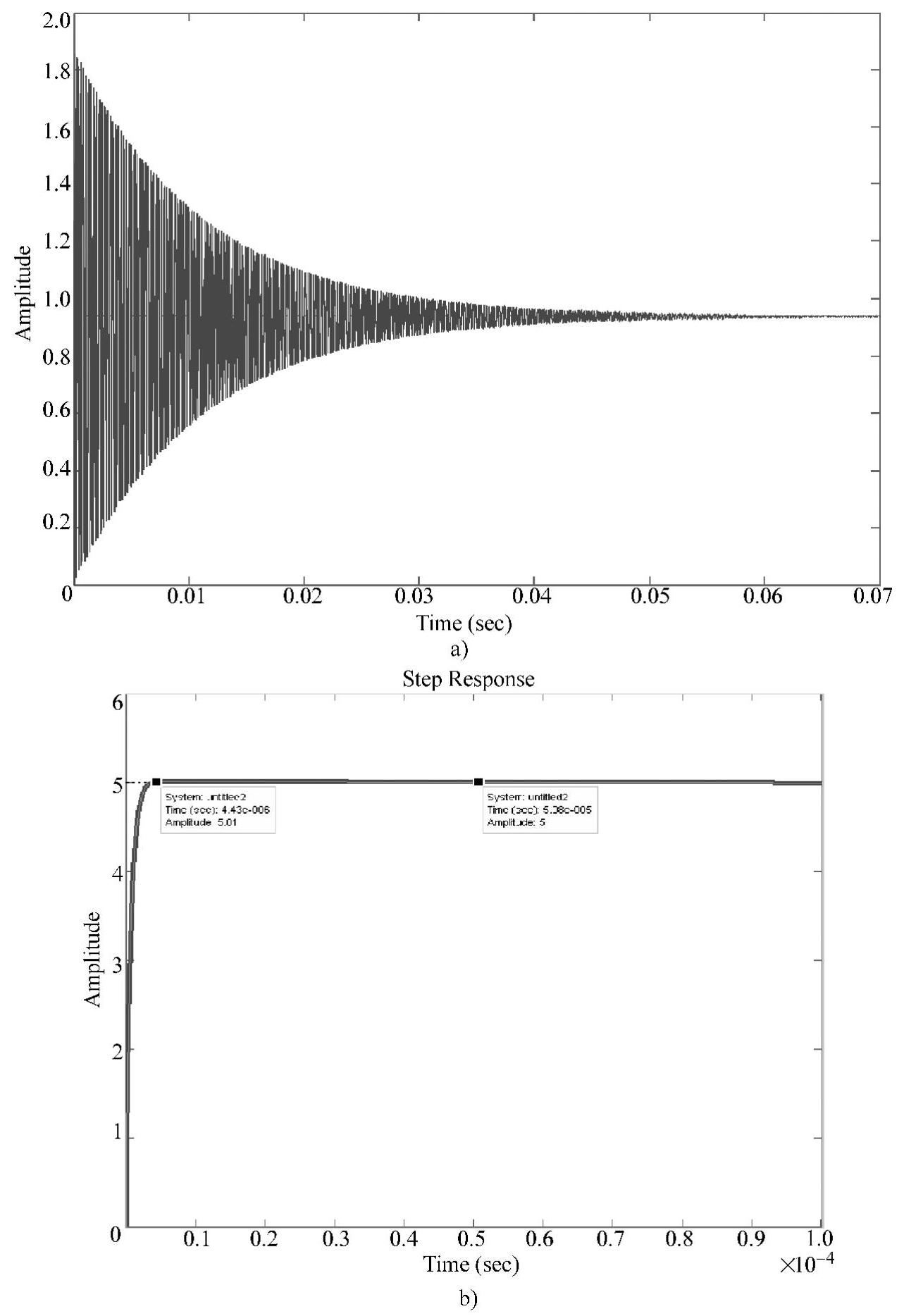
图4-108 系统闭环阶跃响应
a)未加PID控制 b)加入PID控制
d(k)=d(k-1)+77.27e(k)-144.54e(k-1)+67.27e(k-2) (4-69)数字PID的编程算式为:

其中,d(k-1)是上一周期的占空比,e(k)是此次周期的误差,e(k-1)是上一周期的误差,e(k-2)前两次周期的误差。式(4-70)是计算机可编程实现的表达式,这样的算式可以使计算机运算延时时间最短[48]。
综上所述,运用仿真工具,通过仿真分析,可得到被控对象的时域特性和频域特性,为对系统进行稳态、动态特性分析提供了直观的数据,用简单编程,在仿真环境下确定选取PID控制器参数是一种行之有效的方法,相对于传统的经验设计方法,提高了控制系统的设计效率。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




