综合是与分析相反的命题[46]。从控制观点出发,用数学方法寻找一个能满足技术要求的控制系统,通常把这项工作称为系统的综合问题。开关调节系统的复频域综合即是按开关变换器规定的性能构造、在复频域中决定合理的系统结构和各环节的参数、或者按规定的性能确定校正装置型式和参数。
鉴于开关调节系统设计步骤,所谓综合就是根据主电路的数学模型,寻找设计一个控制作用(主要指设计控制器),使得在其作用下系统运行的行为满足所给出的期望性能指标。为了便于设计,定义除补偿网络和电压采样网络之外的环节为控制对象,把补偿网络和电压采样网络合并,并称之为电压控制器。
设计控制器的主要思路如下[1]:
(1)将时域内的技术指标转化为相应的频域参数。对于开关调压系统,由于在时域内可以使用较为通用的测量仪器进行测量,测量方法相对简单,而且测量结果直观易懂,所以,开关调节系统的技术要求大部分是通过时域技术指标体现的;但较为流行的设计方法是以复频域参数为设计依据,在复频域内设计其控制器。因此,需要将时域内的技术指标转化为相应的复频域参数。
(2)在复频域内分析开关变换器主电路的典型传递函数,并画出相应的对数频率特性曲线。
(3)根据主电路的典型传递函数和复频域参数,设计能够与主电路相匹配且满足设计技术要求的控制器。
可见,开关调节系统是一种特殊的自动控制系统。下面将介绍电压控制型开关调节系统的控制器设计。
控制器的设计是在已知控制对象的数学模型基础上进行的。这里以Buck电路为例讨论CCM型电压控制器的设计,如图4-81所示,设Buck变换器及其各元件参数条件为:Ug=16V,U=5.1V,电感L=42.5μH,电感的等效电阻RL=50mΩ;输入电容C=600μF,ESR电阻RC=7.7mΩ,工作频率fs=50kHz,负载电阻R=1Ω,电路工作在CCM。设计步骤如下:
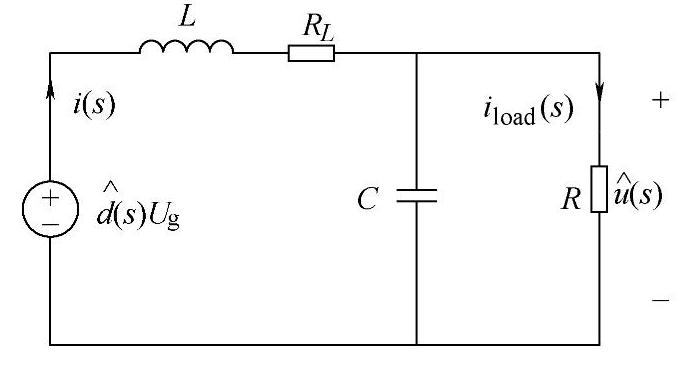
图4-81 考虑电感内阻的Buck变换器的等效电路
步骤1:设计电压采样网络。为了消除稳态误差,在低频段,开环传递函数的幅值远远大于1,即在直流频率点,系统为深度负反馈系统。对于深度负反馈系统,参考电压与输出电压之比等于电压采样网络的传递函数,即:

步骤2:绘制控制对象的博德图。对如图4-81所示的Buck电路,忽略电感电容等效串联电阻后其控制-输出的传递函数为:

由ESR引起的零点参数为:



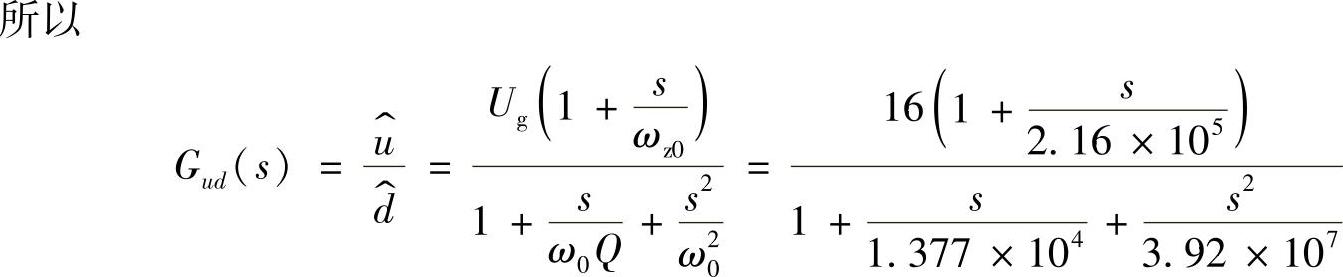
用PSpice软件仿真的模型和幅相频率特性如图4-82所示。也可用Mathcad仿真得到的控制-输出传递函数特性如图4-83所示。由图4-82和图4-83可见,两种方法仿真的特性完全一致。其中穿越频率fc=4.1862kHz,相角裕量φm=180°-165.51°=13.49°<45°。
步骤3:选择控制器。分析控制-输出传递函数特性并对照表2-1,选择双极点-双零点控制器如图4-84所示,其中电压Uref=5.1V,U=5.1V。
双极点-双零点控制器的传递函数为:

步骤4:确定控制器的参数。

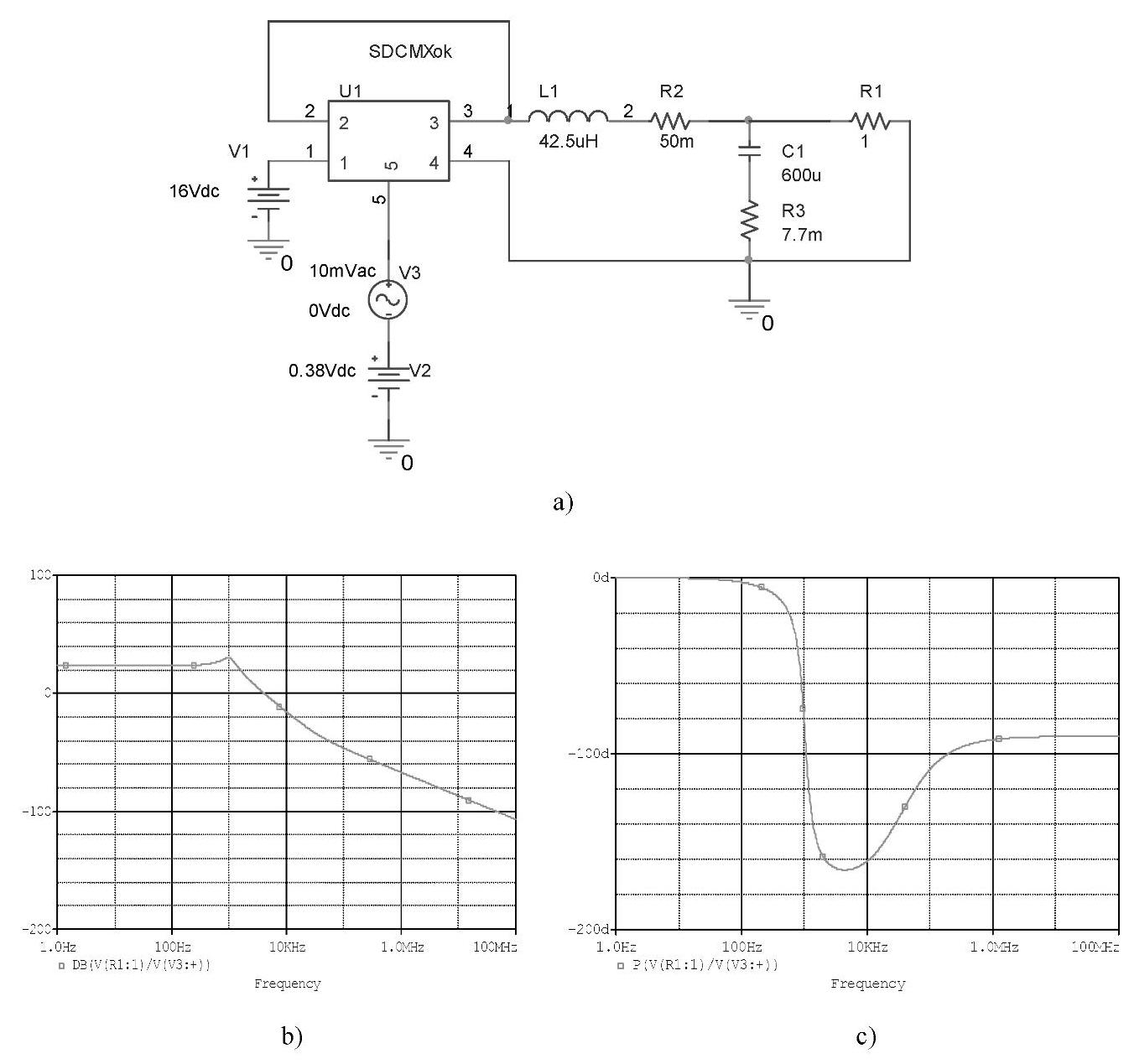
图4-82 用PSpice软件仿真控制-输出的传递函数(https://www.daowen.com)
a)仿真模型 b)幅频特性 c)相频特性
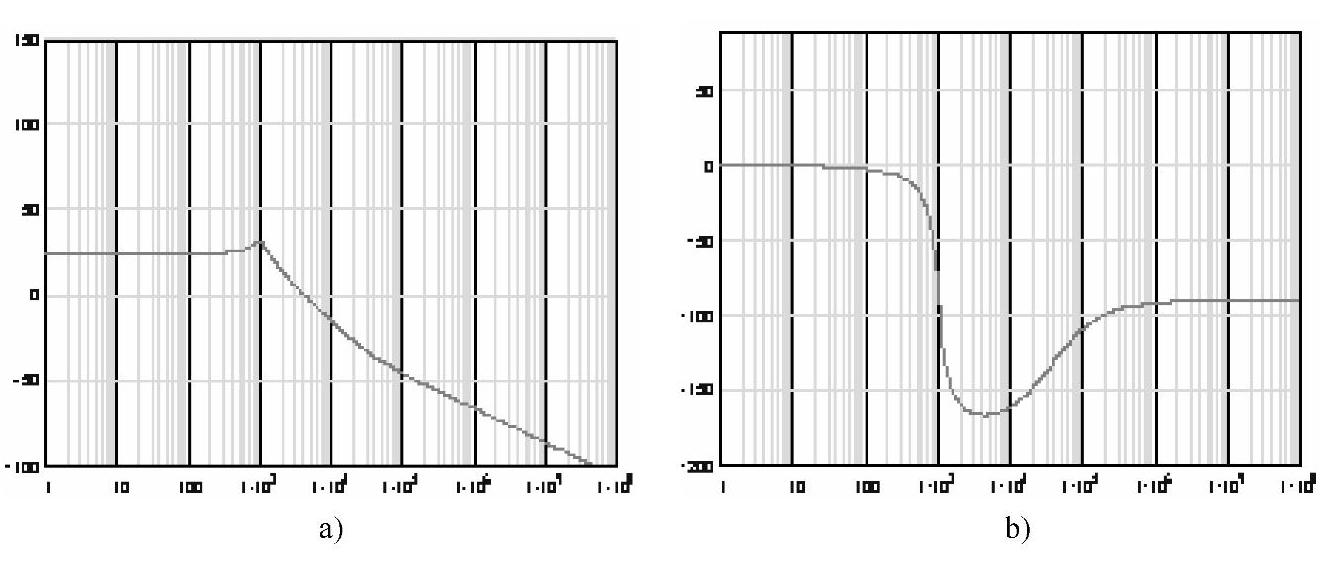
图4-83 用Mathcad软件仿真控制-输出的传递函数
a)幅频特性 b)相频特性
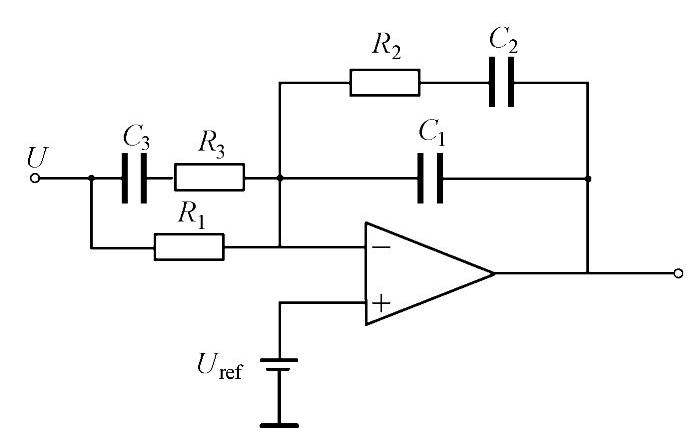
图4-84 双极点-双零点控制器电路





用Mathcad仿真控制器的幅相频率特性如图4-85所示。
步骤5:分析结果。控制器中的ωz1,ωz2用于抵消控制对象的极点,ωp1用于抵消ESR引起的零点,ωp2≥1.5ωc,所以ωc=105 rad/s,fc=15.9kHz,fs/fc=3.14,可见,穿越频率较高。
引入控制器后,系统开环传递函数为:
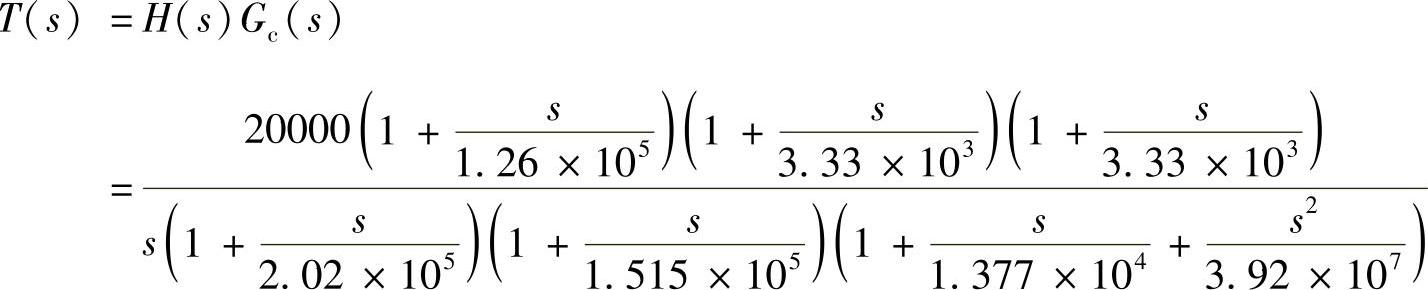
采用双极点-双零点控制器的电压控制开环幅相频率特性如图4-86所示,也可用PSpice软件进行仿真,其仿真模型如图4-87所示,特性如图4-88所示。其中20lg[(16×1250)/2π]=70.06dB,穿越频率fc=21.969kHz,相角裕量φm=180°-134.18°=45.18°>45°,可见,满足稳定性要求。

图4-85 控制器的传递函数的频率特性
a)幅频特性 b)相频特性
步骤6:反馈对音频的影响。未加反馈时音频传递函数为:

用Mathcad仿真输入-输出传递函数的幅相频率特性如图4-89所示,若用PSpice软件仿真音频传递函数,其仿真模型和特性如图4-90所示。引入补偿网络Gc(s)加了电压反馈后,闭环音频特性的PSpice仿真模型如图4-91所示,如图4-92所示为闭环音频特性。从开环和闭环特性可见,在100kHz处开环和闭环音频衰减率的幅值分别约为-10dB和-36dB,当输入电压Ug产生1V的波动时,输出电压U分别产生0.316V和15.8mV的变化。这个结果表明,电压反馈能够有效地减小输入波动对输出的影响。
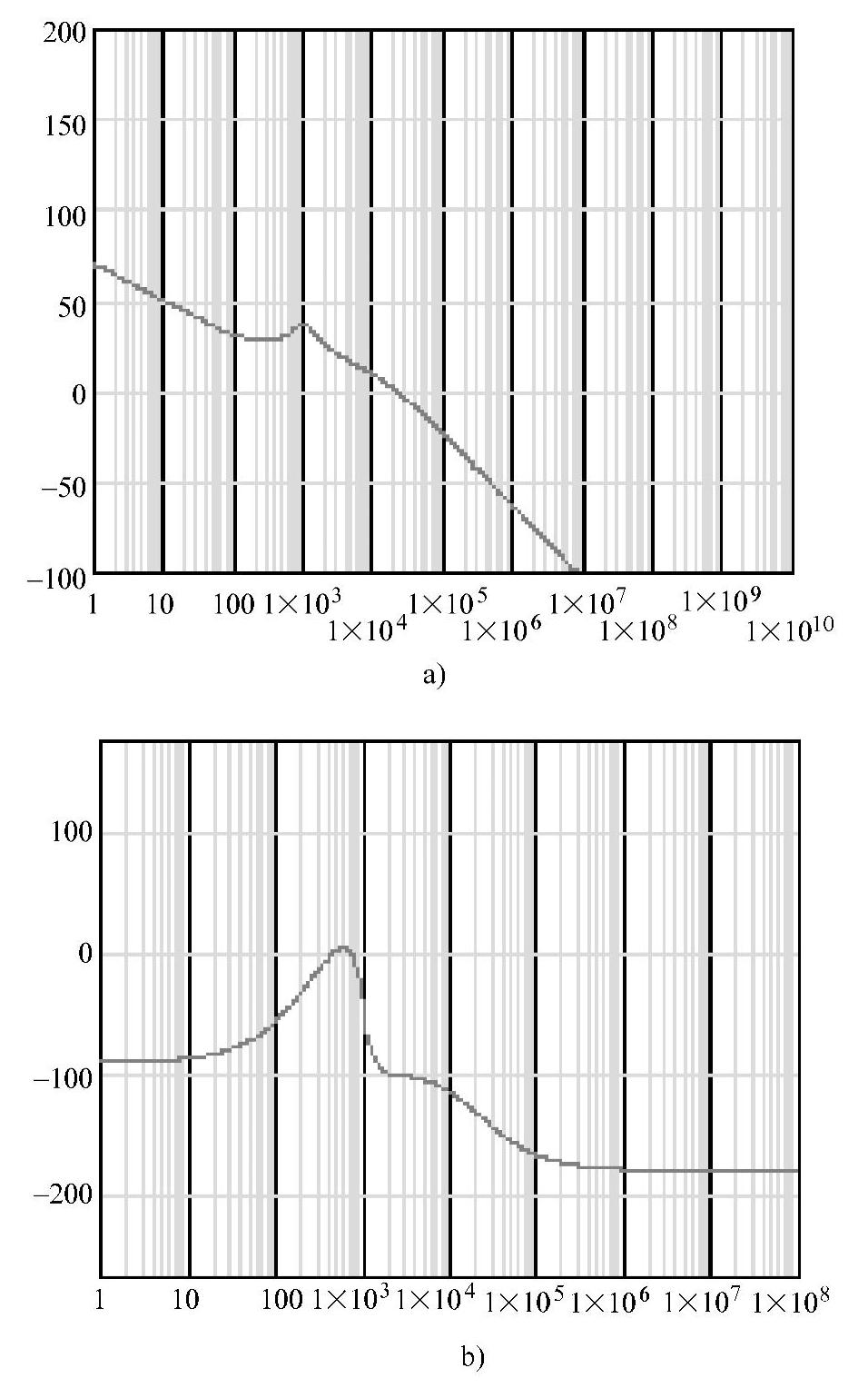
图4-86 具有控制器的开环传递函数波特图
a)幅频特性 b)相频特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




