单周期控制控制(One-Cycle Control,OCC)技术是一种大信号、单环非线性控制技术,它与线性PWM控制的主要区别在于:通过对开关变量的积分,使其在每个开关周期的平均值等于给定值,实现在单周期内达到新稳态。单周期控制具有电路简单、动态响应速度快、能有效抑制电源电压的扰动等优点,可运行在CCM和DCM下。
单周期控制系统的组成和工作基本原理
单周期控制的Buck变换器原理图如图2-94所示。控制电路中主要有:带复位开关的积分器、比较器、RS触发器、脉冲信号发生器、直流偏置电压等。
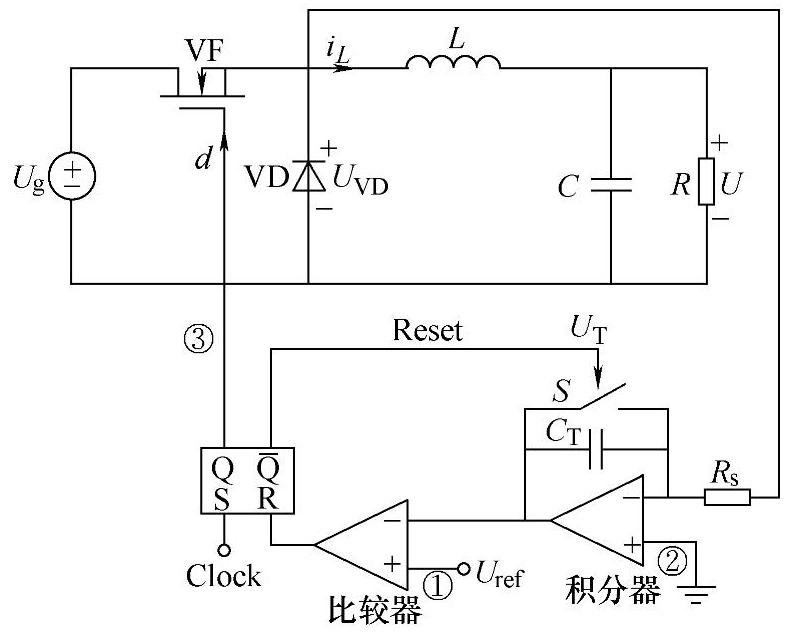
图2-94 单周期控制的Buck变换器原理图
功率开关管的导通时刻由时钟脉冲确定,因此开关周期Ts为常数。在CCM下单周期控制的基本工作原理:当时钟信号Clock到来,RS触发器置位,使功率开关管VF导通,控制电路的复位开关S断开,输入电压Ug被施加到二极管VD的正端,由于二极管承受反向电压而截止,积分器对二极管上的电压开始积分,当积分电压达到参考电压瞬间,比较器动作输出高电平,使RS触发器复位,控制功率开关管VF关断,二极管VD导通,控制电路中的复位开关S闭合,积分电容两端电压被强行置于零,并保持到下一个周期。
根据单周期控制原理,则有

式中,D为占空比,Uref为参考电压,uVD为二极管电压。若输入电压发生变化,例如输入电压按斜坡上升或按斜坡下降,都将影响到对二极管上电压的积分,使积分电压达到参考电压的时间缩短或延长,占空比随之调整,迫使开关变量的平均值与参考值相等或成比例。由于这种调整是在一个开关周期内完成的,故称之为“单周期控制”。
值得一提的是,这种控制与带输入电压前馈的PWM变换器很相似[36]。单周期控制由于引入了输入电压前馈,因此抗输入电压扰动能力强,并能在一个开关周期内消除输入电压变化对输出电压的影响。但由于没有引入输出电压反馈,对负载扰动抑制能力弱。
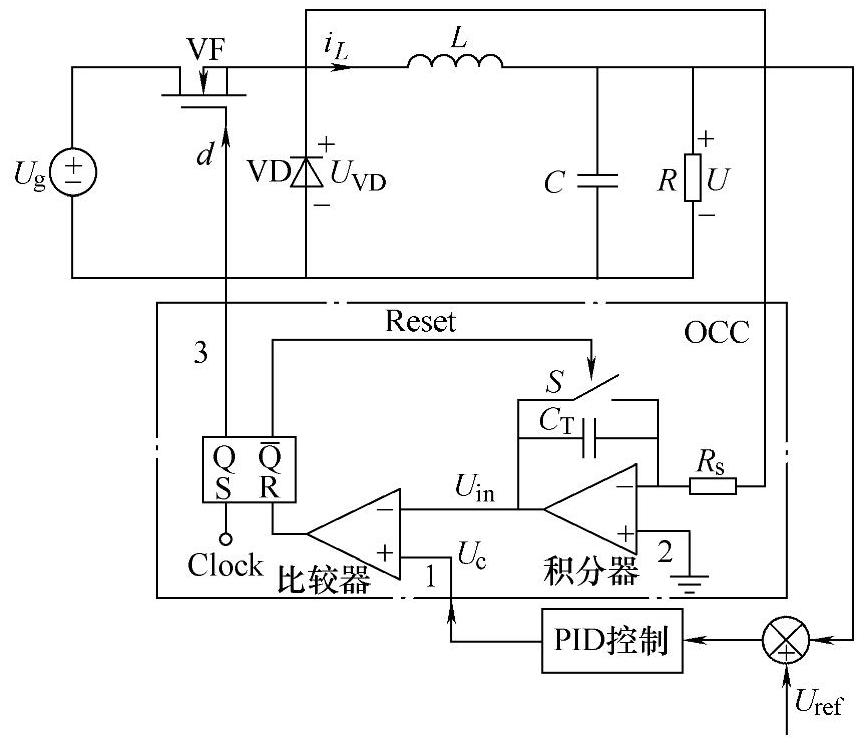
图2-95 PID-OCC控制型Buck变换器原理图
为了克服单周期控制的不足,需要引入输出电压反馈。如图2-95所示为一种综合了单周期控制和PID控制的方法(PID-OCC控制)[37]。它与单周期控制主要区别在于引入了电压反馈,输出电压的误差经PID调节器后得到Uc,再送到比较器的原参考电压输入端1。由于这种PID-OCC控制方法是在OCC控制的基础上引入输出电压反馈,它与电压控制相似,有文献称之为电压型单周期控制。改进的单周期控制不但保留了单周期控制抑制输入电压扰动能力强的优点,同时大大改善了动态负载特性。
图2-96给出了PID-OCC控制型Buck变换器的框图,从图中可见,系统为双环控制。该系统有两个环,一个是由单周期控制构成的抑制输入电压扰动的内环,另一个是由PID控制构成的抑制输出扰动的外环。这种控制将比单周期控制和传统的PWM控制具有更好的性能。与单周期控制相比,它能更好地抑制输出扰动和负载变化引起的扰动。而与传统的PWM控制相比,它能更好地抑制输入电压的扰动。
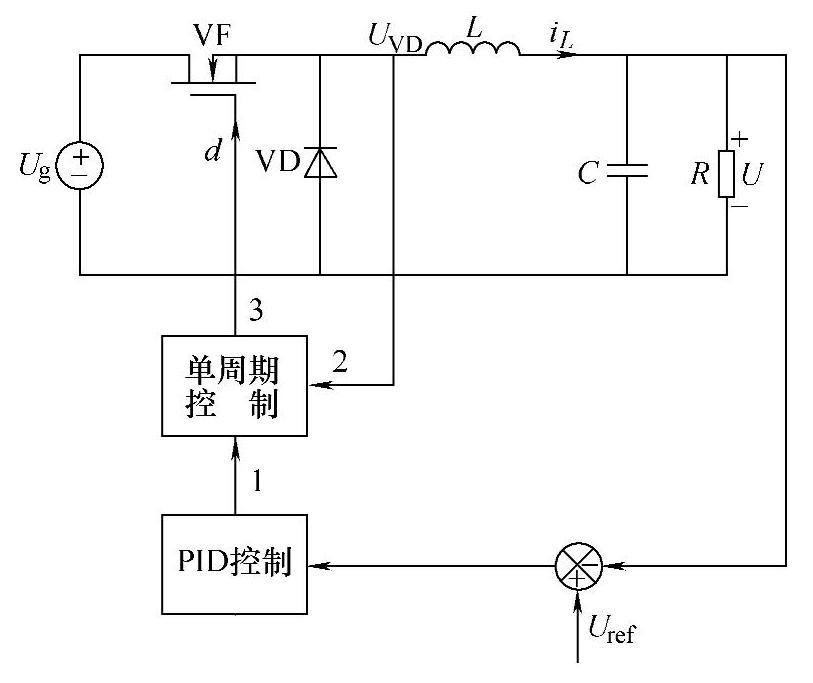
图2-96 PID-OCC控制型Buck变换器框图
为了便于对单周期控制建模,图2-97给出了Buck变换器的单周期控制简化框图。图中积分器的传递函数为GI(s),结合图2-95积分器的传递函数为
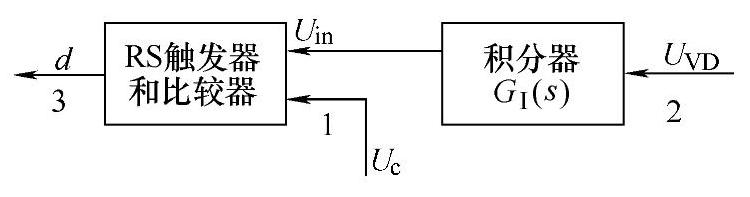
图2-97 单周期控制的框图

式中,K为积分器的增益,有

如果选择积分器增益等于开关频率,即

这样,变换器的输出电压就等于Uc。当然,实际中,由于使参考值等于希望的输出电压值常常是困难的,为此,增益可选择其他合适值,例如:选择K=fs/A,则输出电压为(www.daowen.com)
U=AUc (2-230)
式中,A为比例系数。
为此,占空比d(t)与控制电压uc(t)之间的关系可用下式表示:

引入小信号扰动,即



将式(2-232)代入式(2-231),可得到

令 ,则有
,则有
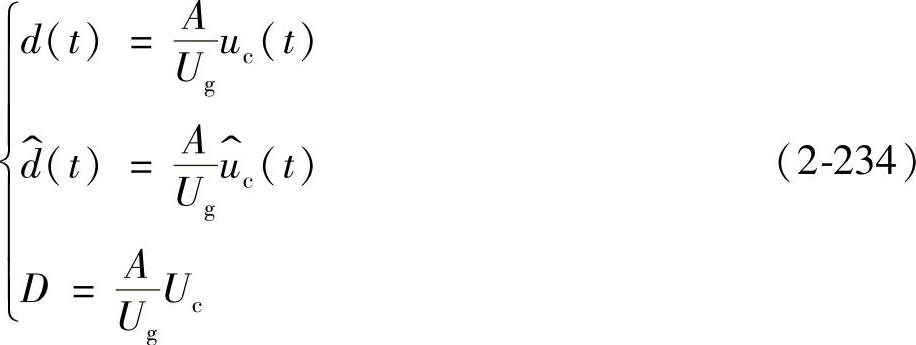
事实上,占空比d(t)是输入电压ug(t)和控制电压uc(t)的函数,即
d(t)=f(ug(t),uc(t)) (2-235)
由于式(2-235)中的两个变量是独立的,因此占空比的小信号可以写成

对于式(2-236)中的第1项,可由单周期控制来实现,因此,在设计PID控制器时,不需考虑第1项,而只要考虑第2项。所以,可以将式(2-234)关系式用来设计PID控制器。这里PID的设计与传统的方法一样,限于篇幅,关于PID控制器的设计不赘述。
单周期控制模型的传递函数为

基于Buck变换器的单周期控制的等效功率级传递函数为

在单周期控制设计中,另一个需要考虑的问题是输入电压的边界值。为了使系统能正常运行,需满足如下关系

式中,Dmax和Dmin为实际占空比的最大和最小值,uc为如图2-95所示的PID控制器的输出,A为设计积分器增益时引入的比例系数。若系统设计时不能满足式(2-239)的条件,则系统的频率会发生变化。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







