这里还是以非理想Buck变换器为例分析和研究双环控制型开关调节系统。Buck主电路参数为:输入电压Ug=23.0V,滤波电容C=370μF;电容的等效串联电阻RC=55mΩ;二极管的开通损耗电阻RVD=54.7mΩ;MOSFET的开通损耗电阻Ron=82.10mΩ;电感的等效串联电阻RL=51.2mΩ;CCM下动态电感L=66.64μH,负载R=5.2Ω,输出电压U=11.4V,fs=52kHz,采用峰值电流控制,利用PWM控制IC中CT上的电压信号作为斜坡补偿网络的输入信号,实验样机采用UC3825芯片。双环控制型开关调节系统原理示意图如图2-71所示。
首先,在PSpice仿真软件环境下,建立如图2-72所示的组合型CCM-DCM平均开关模型和如图2-73所示的峰值电流控制器的PSpice模型——CPM(有关建立仿真模型的内容将在本书第4章中介绍),再根据实际主电路画出仿真电路,如图2-74所示(在CCM下)。
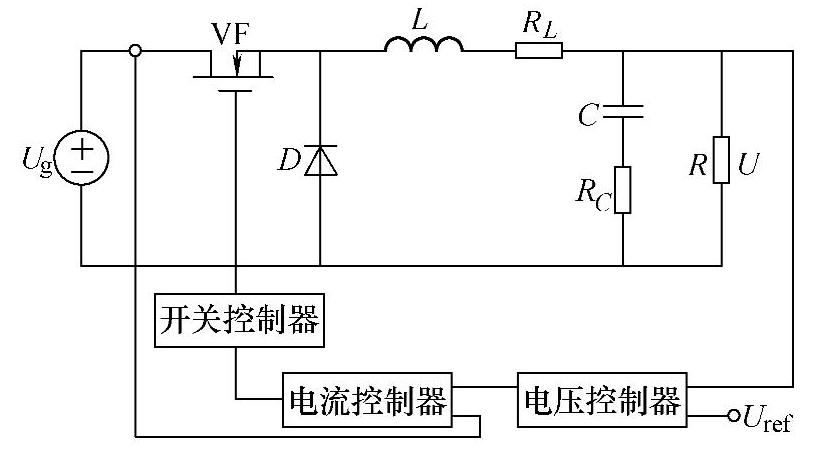
图2-71 双环控制型开关调节系统原理示意图
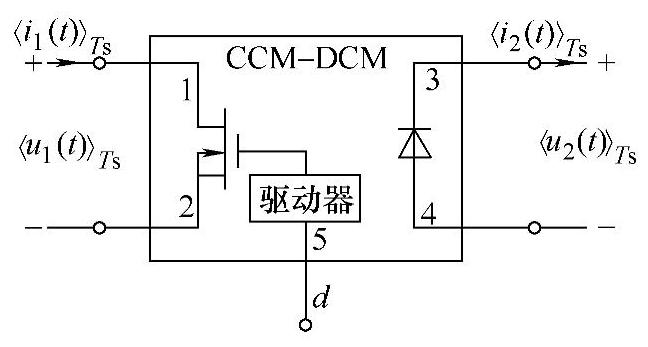
图2-72 组合型CCM-DCM模型
下面分析峰值电流控制对开关变换器功率级动态特性的影响。
1.控制-输出传递函数的频率特性
用图2-74的CPM控制Buck变换器仿真模型,变换器工作在CCM下,在静态工作点的基础上进行两次AC扫描仿真。
为了便于叙述,定义占空比-输出电压的传递函数Gud(s)为原功率级的传递函数,其输入量与输出量分别为功率开关管VF占空比和变换器的输出,原功率级的传递函数表征了采用直接占空比控制模式时,变换器主电路的动态特性。定义控制-输出的传递函数Guc(s)为新功率级的传递函数。新功率级包括了变换器主电路和峰值电流控制器,其输入量和输出量分别为峰值电流控制器的输入控制信号(在双环控制时,这个控制量为电压控制器的输出信号)和变换器的输出。新功率级的传递函数表征了采用峰值电流控制模式时,变换器主电路的动态特性。
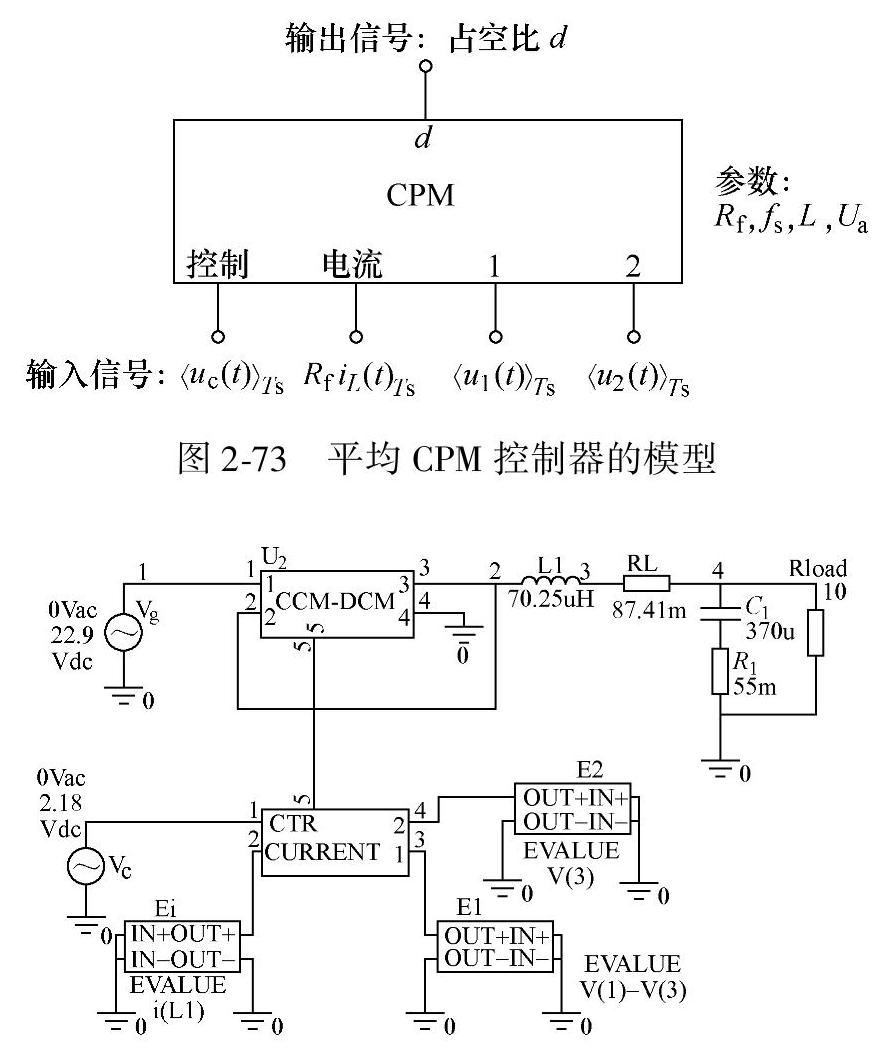
图2-74 CPM控制Buck变换器仿真模型
求取原功率级的传递函数Gud(s)的方法:在图2-74电路中,去掉CPM控制器,在图2-74中CCM-DCM的5端施加一个带有直流偏置的交流电压源。通过已计算出的开关占空比(D)静态工作点的数值得到直流偏置电压为0.498V,交流电压的幅值为1mV,输出电压的初值U=8.1V,电感电流的初值IL=0.81A。在上述初值的基础上进行AC扫描。
求取新功率级的传递函数Guc(s)的方法:在图2-74电路中,在CPM模型的CTR端施加一个带有直流偏置的交流电压源。直流偏置电压Uc=2.18V,交流电压的幅值为0.1mV。开关占空比的初值D=0.498;输出电压的初值U=8.1V;电感电流的初值IL=0.81A。在上述初值的基础上进行AC扫描。
两次AC扫描得到的仿真曲线如图2-75所示。
从图2-75的仿真曲线可见,原功率级的传递函数Gud(s)是一个高Q值的二阶系统的响应,它具有双重极点。在双重极点处,幅频特性幅值有一个尖峰,相频特性从0°~-180°的急剧变化。新功率级传递函数Guc(s)是一个含有两个极点的系统。主极点(低频极点)的频率在0.1~1kHz之间,其数值近似等于负载电阻和滤波电容决定的极点频率;另一个极点约在开关频率的一半处。因此,就设计者关心的频率范围(直流到开关频率的一半),新功率级的传递函数是一个一阶系统。这也证明了CPM控制器的作用是将原二阶系统变为一阶系统。新功率级的另一个特点是在很宽的频率范围内相位滞后都在-90°左右。一个高频极点使得在较高的频率处增加了额外的相位延迟。比较图2-75中的两种频率特性曲线,CPM控制优于占空比控制,又因为新功率级的传递函数在低频处是一个一阶系统,所以容易设计电压反馈环。
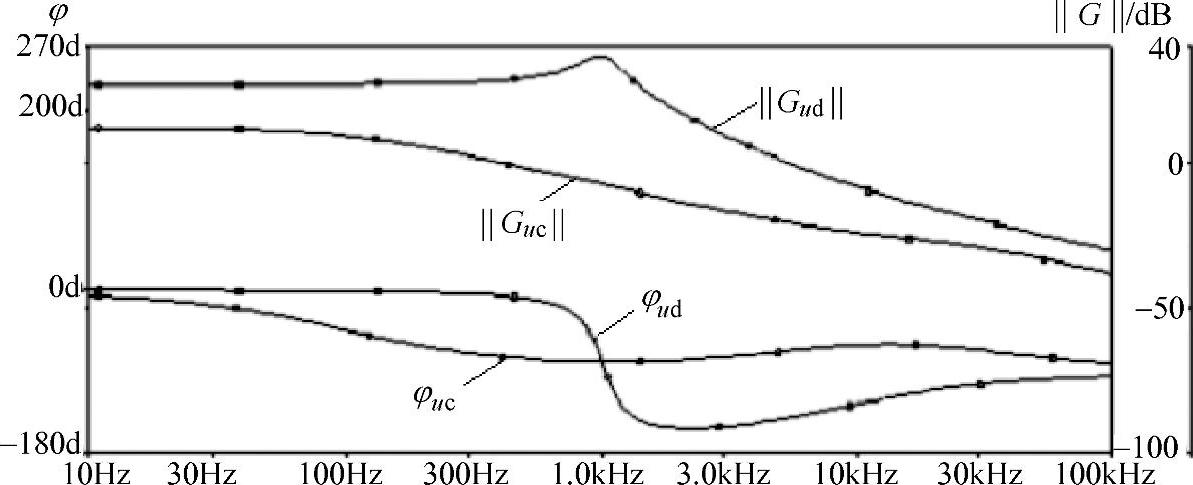
图2-75 Buck变换器CPM控制与占空比控制的控制-输出频率特性曲线比较
2.音频衰减率(https://www.daowen.com)
峰值电流控制的另一优点是具有很强的抑制电源电压扰动的能力,这同样可通过仿真来验证。在如图2-74所示的电路中,去掉CPM控制器,在CCM-DCM的5端施加一个直流电压源,已计算出的开关占空比(D)静态工作点的数值得到直流偏置电压为0.498V;在CCM-DCM的1端施加一个带有直流偏置的交流电压源。直流偏置为直流输入电压22.9V,电压源的幅度为0.1mV,输出电压的初值U=8.1V,电感电流的初值IL=0.81A。在上述初值的基础上进行AC扫描,得到原功率级Gug(s)的频率特性。同理,对新功率级Guc(s)仿真,可得到Guc(s)的频率特性,两个仿真结果如图2-76所示。比较两条仿真曲线,在100Hz附近,CPM控制方式对输入电压扰动的衰减要比占空比控制方式至少少了10dB。这说明电流反馈可大大降低输入电压波动对输出电压产生的影响。
3.输出阻抗频率特性
测量输出阻抗的方法是在变换器输出端施加一个交流电压源,测量其电流。
如图2-77所示为原功率级和新功率级仿真电路,相应的仿真结果如图2-78所示。从中可见,在占空比控制的变换器(原功率级)中,低频段的输出阻抗很小,原因是在低频段,因电感感抗很小,输出阻抗又主要取决于电感的阻抗。但随着频率的上升,电感的阻抗增大,输出阻抗也跟着增大,所以在输出LC滤波器的谐振频率处,输出阻抗出现了一个尖峰。随着频率继续更高的上升,输出阻抗主要取决于滤波电容的阻抗,它随着频率的增大而减小。
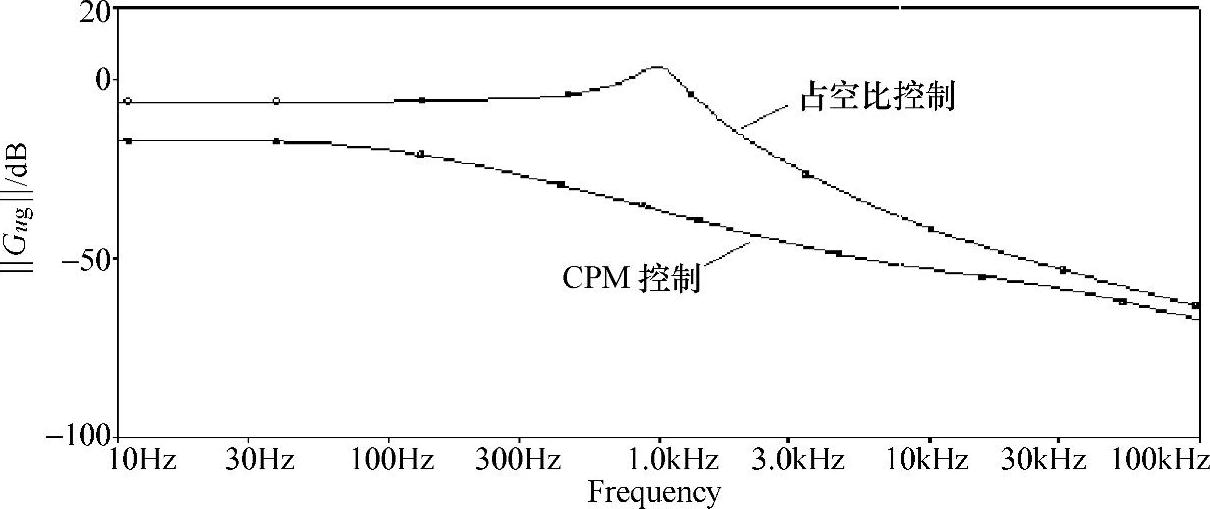
图2-76 Buck变换器CPM控制与占空比控制的输入-输出的频率特性曲线比较
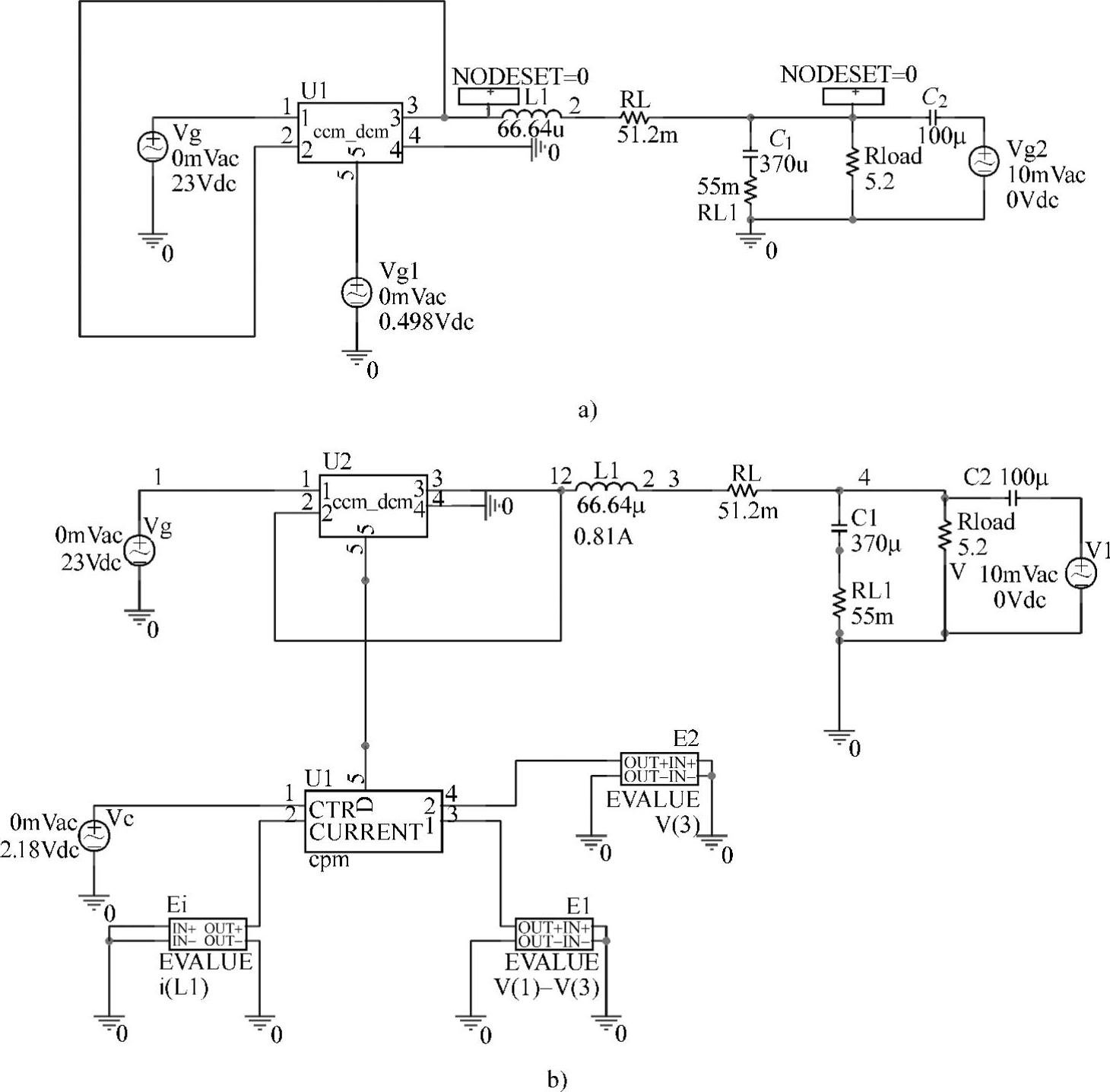
图2-77 Buck变换器输出阻抗频率特性仿真电路
a)原功率级 b)新功率级
对于CPM控制的变换器(新功率级),低频阻抗很高,它等于负载电阻与输出电容的并联。由于CPM控制使得系统变为一个一阶系统,即在低频段,电感不会影响系统的特性,包括输出阻抗。随着频率的上升,输出阻抗主要由滤波电容决定,且随着频率的增加而不断减小。在高频段,占空比控制的变换器与CPM控制的变换器的输出阻抗有着相同的渐近线。
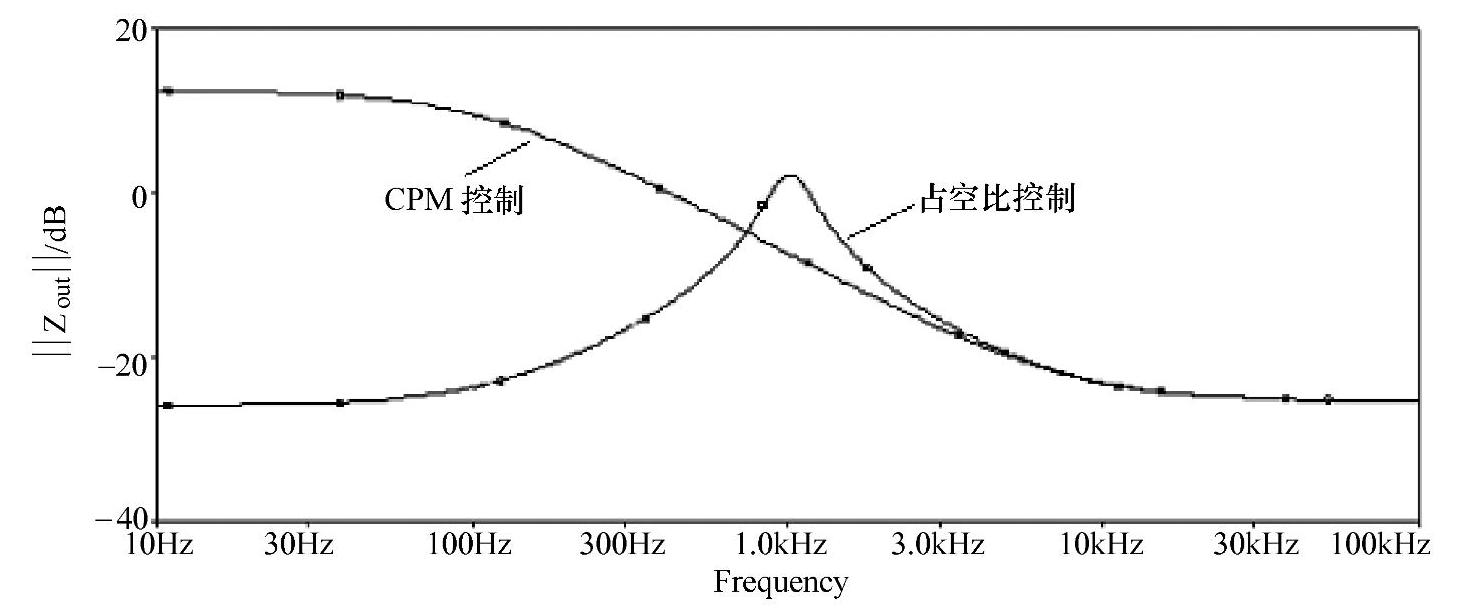
图2-78 Buck变换器输出阻抗频率特性曲线
用Agilent 4395A网络/频谱/阻抗分析仪测试系统的等效功率级传递函数,即测试Guc(s)(关于实验测试的内容将在本书第5章介绍),测得如图2-79a所示CCM的实测曲线。调节负载使系统工作在DCM下,用同样的方法对开关调节系统进行仿真和实验测试,可得到在DCM下的等效功率级传递函数的仿真和实测曲线如图2-79b所示。实测曲线与仿真曲线相吻合,表明所建的仿真模型的准确。
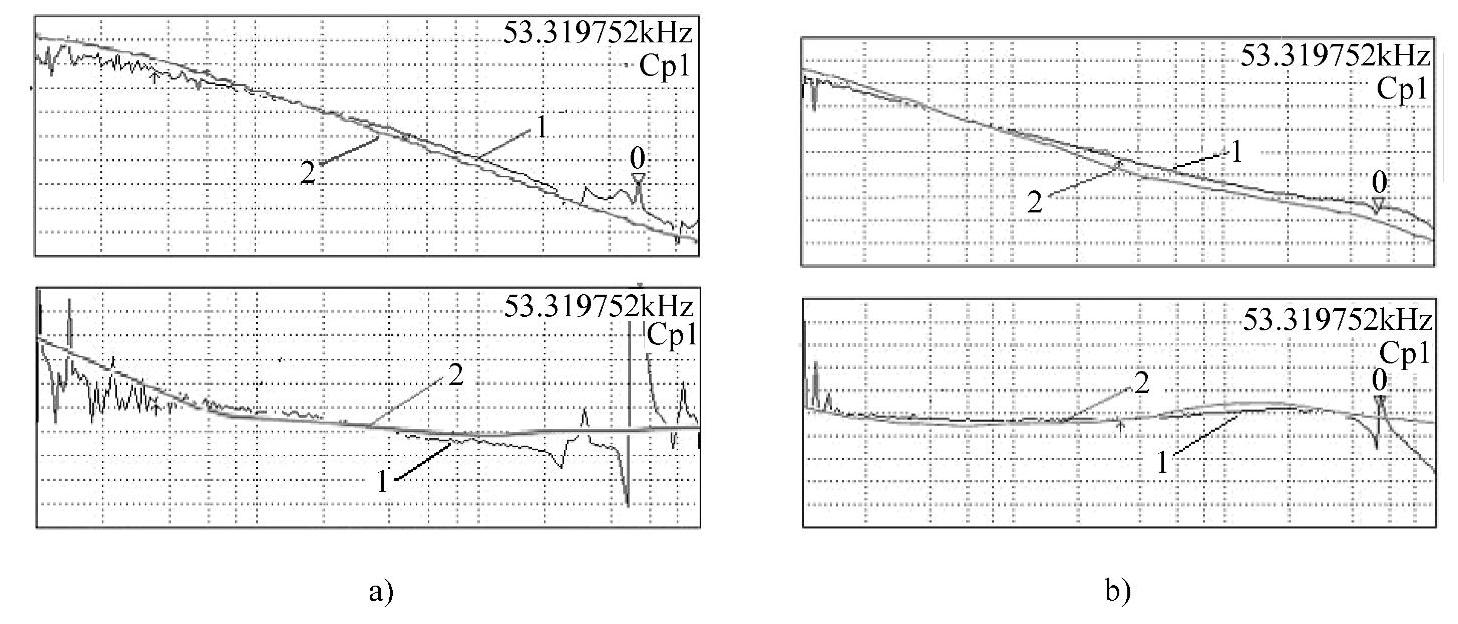
图2-79 CPM控制Buck变换器等效功率级传递函数仿真和实测曲线
a)开关调节系统在CCM下 b)开关调节系统在DCM下
1—实测曲线 2—仿真曲线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。



