开关变换器是一个强非线性动态系统。在电力电子技术逐渐走向成熟的今天,系统的非线性现象诸如次谐波振荡、周期跳变、拟周期运动、分叉、混沌等已引起越来越多的关注[17]。前面介绍的用低频小信号进行分析,采用的控制技术应用在大信号条件下的系统可能是不稳定的。
随着控制理论的发展,非线性控制技术也被尝试应用到开关变换器的控制电路中。虽然有些控制技术还未被广泛应用,但因其独特的控制性能,应用前景可观。
1.单周期控制
单周期控制技术是1991年由Keyue M.Smedley提出的一种非线性大信号PWM控制理论[18]。单周期控制技术有恒频PWM开关、恒定导通时间开关、恒定截止时间开关和变化开关4种类型。
恒频PWM开关单周期控制原理如图2-4所示。假设开关S以开关频率为fs=1/Ts的开关函数k(t)工作,可表示为

每个周期中有Ts=Ton+Toff,占空比d=Ton/Ts由参考信号ur调制,输入信号x(t)被开关S斩波,则输出信号y(t)的频率、脉冲宽度与开关函数k(t)相同,x(t)是y(t)的包络线,即y(t)=k(t)x(t)。
由图2-4可知,开关S一旦由时钟脉冲导通,同时积分器开始工作,积分值为

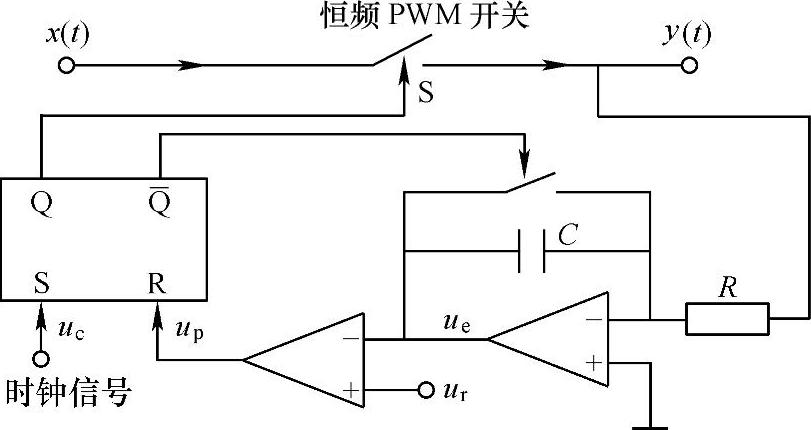
图2-4 恒频PWM单周期控制原理图
上式中假设了时间常数RC与时钟uc的周期时间Ts相等。当积分值ue达到参考信号ur时,RS触发器复位,开关S关断,积分器复位,一个开关周期结束,准备下一个开关周期。此时,当前开关周期的占空比可由下式决定,即有

由于开关周期Ts是常数,这里占空比是被控量,则输出信号的平均值为

由式(2-4)可见,在一个开关周期内可瞬时控制输出信号y(t),又由于输出信号y(t)与参考信号ur为相互独立的量,因而单周期控制技术具有普遍的稳定性。
单周期控制技术的基本思想是在每个开关周期内令开关变量的平均值与控制参考量相等或成比例。因此,单周期控制技术可以在一个开关周期内瞬时地控制输出电压,动态性能比电压型、电流型瞬时值控制技术优越。
2.电荷控制
电荷控制属于电流型单周期控制[19]。电荷控制的基本思想是:在一个开关周期内对流过功率开关管电流的检测信号积分,得到表征输入总电荷量的电压信号,通过控制这一电压去控制输入的总电荷量,亦即控制输入的平均电流[20]。
如图2-5所示是基于Buck变换器的电荷控制原理图。功率开关管VF在每个开关周期开始时闭合,与此同时S断开,开关电流is被检测并给电容C1充电。当电容电压增至Uref时,VF断开,同时闭合S使C1放电。电压Uref表征了一个开关周期内流过功率主开关的总电荷量。定频工作时,UC与开关电流的平均值成比例。(https://www.daowen.com)
电荷控制的基本控制方程为

式中,is为流过功率开关管的电流;uC(t)为电容C1两端的电压。
式(2-5)也可表示为
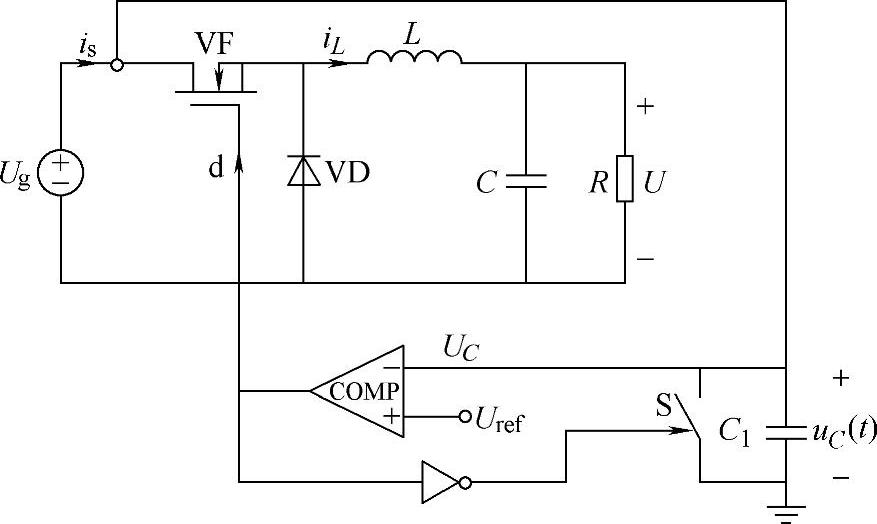
图2-5 电荷控制原理图
式中,Qs为功率开关管在DTs导通时间内输入的电荷量。可见,输入的平均电流严格地跟踪输入参考的电压信号,即实现了电荷控制。
3.滑模变结构控制
滑模变结构控制是根据滑模变结构控制理论[21],利用高速切换的开关控制,把受控非线性系统的状态轨迹引向预先指定的状态平均空间平面(又称滑模面)上,随后系统的状态轨迹就限定在这个平面上[22]。
由于开关变换器本质上是一种随开关的通断而变化结构的强非线性系统,可基于变结构理论的滑模控制来设计控制器[23,24]。参考文献[22]中指出,一个滑模控制系统的设计分两方面:首先是寻求滑模函数,使受控系统在滑模面上的运动渐趋稳定且品质良好;其次是设计变结构控制,使系统可由空间的任何一点于有限时间内到达滑模面,从而在滑模面上形成滑动模态区。
参考文献[25]介绍了在Buck变换器上实现的滑模控制。考虑到开关变换器的首要目标是实现输出电压的稳定,在系统动态变化过程中,输出电压的变化速度总是远远低于电感电流的变化速度,而滑模控制是通过开关的高速切换来实现状态轨迹沿滑模面滑动,因此控制方案中只对电感电流进行滑模控制,输出电压仍然采用传统的PI校正方法,其控制结构框图如图2-6所示。内环采用滑模控制电感电流,外环采用比例积分调节器控制输出电压,实现了电感电流滑模控制和输出电压的稳定。

图2-6 Buck变换器滑模控制结构框图
滑模变结构控制技术优势在于输出或负载大范围变化时可使系统稳定,提高系统的稳定鲁棒性和改善动态特性。但与传统的电压型PWM变换器相比,它还存在设计复杂、调试要求高,无现成的IC可用等问题。
4.无源控制
无源控制技术首先是在机器人中得到应用。参考文献[26]指出:开关变换器的无源控制方法是基于能量的控制策略,其理论基础实际上就是Lyapunov方法。从这个意义上说,无源控制策略应当是一种比较保守的控制方案,它追求系统的大范围稳定,即便在恶劣的情况下都能满足系统渐近稳定的控制目标。
参考文献[26]以Buck变换器为例,参考文献[27]以Buck-Boost变换器为例,分别从能量的角度建立了变换器的数学模型,给出了开关变换器无源控制方法的推导过程,并从理论上证明了其稳定性。
无源控制技术本质上是一种非线性控制,且算法较简单,易于实现。由于它是基于能量的观点,是一种全局定义且全局稳定的控制策略,对系统参数变化及外来摄动有较强的鲁棒性。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






