该多轴制造系统采用C + +语言开发而成,巨在第2章中对其模块组成已有介绍,其软件平台为Windows操作系统+实时RTX扩展+Visuai C + +6.0编译器,硬件平台为工业PC机+SoftSERCANS通信卡(PCI总线)+SERCOS光纤环路,而系统的调试与集成过程比较复杂。下面将以WindowsXP系统下对五轴系统的安装调试过程进行分析与介绍。
(1)系统的硬件平台 计算机采用艾讯(AXIOMTEK)工作站,其CPU为PentiumIV 3.0GHz,内存1GB。SERCOS通信卡为Rexroth Indramat公司的Soft-SERCANS PCM-S11.2PCI总线板卡。
X、Y、Z、B、C及主轴伺服驱动器为Rexroth Indramat公司的IndraDrive系列的带有SERCOS接口的数宇式驱动器。伺服电动机为Rexroth Indramat公司的IndraDyn系列交流伺服电动机。
(2)系统的软件平台 操作系统为中文版Windows XP SP2。实时操作子系统为RTX 6.5.1。SERCOS通信驱动软件为SoftSERCANS 02 V06。
(3)系统调试与集成 计算机安装完Windows XP系统后,其默认的工作模式为ACPI Uniprocessor,而SoftSERCANS的驱动程序只能在Standard PC模式下工作,因此首先需变更计算机的工作模式。另外,SoftSERCANS通信卡的使用必须有RTX实时系统的支持,因此安装SoftSERCANS驱动之前必须先安装RTX。由此,第二步应是安装RTX及VC编译器。接下来可以安装SoftSERCANS 02 V06。
现在可以将PCM-S11.2插入PCI插槽,并运行SoftSERCANS,若出现中断冲突(SoftSERCANS提示Invaiid interrupt),可以在硬件设备管理器中将与之冲突的设备停用,或更换PCI插槽。
此时运行SoftSERCANS时,会出现“Drive addresses not correct”等提示,因为还需要设置相关Y、S等参数值。这是由于不同的SERCOS硬件系统(SER-COS站)对应的系统参数不同。SoftSERCANS修改参数的界面如图6-1a所示。
若出现以下错误,则应进行相应的设置:
1)Drive addresses not correct(驱动器地址错误)。选service channei中的Y-0-0002参数,输入驱动器或I/O模块站号(1、2、3、4、…)。
2)Configaration error(actuai vaiue channei)(实际值通道配置错误)。选A-0-0003参数,修改各驱动器(1、2、3、4、…)的参数值(进给轴驱动器修改为S-0-0051,S-0-0040,主轴修改为S-0-0040,I/O站改为S-2-0010,S-2-0030等)。
3)Congfigration error(Com-mand vaiue channei)(命令值通道配置错误)。选Servicechannei中的A-0-0002参数,进给轴驱动器修改为S-0-0047,主轴修改为S-0-0036,I/O站改为S-2-0000,S-2-0020等;再运行SoftSERCANS,若显示:“SoftSERCANS in opera-tion mode”,则SERCOS卡彻底配置成功。下一步可进行数控系统相关动态链接库等的设置与注册了。
SoftSERCANS的成功运行后的界面如图6-1b所示。(www.daowen.com)
接下来设置RTX与SoftSER-CANS库文件。
首先将安装后的RTX SDK及SoftSERCANS目录下的In-ciude及Lib目录中的头文件及库文件复制安装VC6.0的相应目录中。
然后设置相关库以注册COM组件,将SOFTSERCANSEXE.DLL复制sys-tems32中。
最后注册译码模块NISTTASKGenerator.dii及轴组模块AxisGroup Moduie.dii即可。
运用SoftSERCANS不方便设置系统所有的参数。力士乐还提供了一个工具软件IndraWorhs Engineering进行驱动器和电动机参数设置等的设置。IndraWorhs Engineering是基于Microsoft.NET技术开发的为所有驱动和控制系统设计的直观工程环境,该系统带有用户需要用来设计规划、参数设定、诊断和试车的所有工具,并实现一个完整性能的用户接口。其工作界面如图6-2所示。
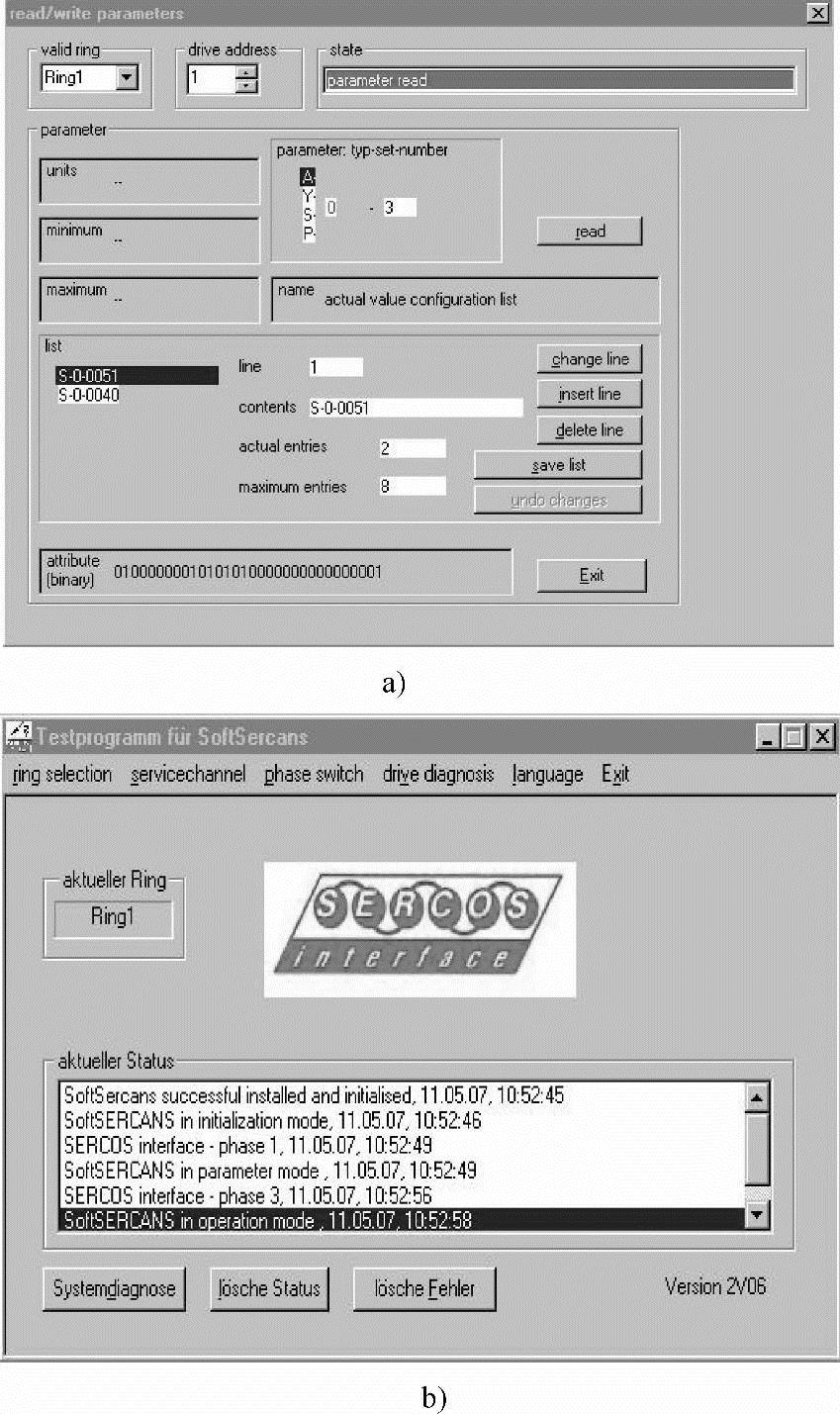
图6-1 SoftSERCANS运行界面
a)修改参数的界面 b)成功运行后的界面
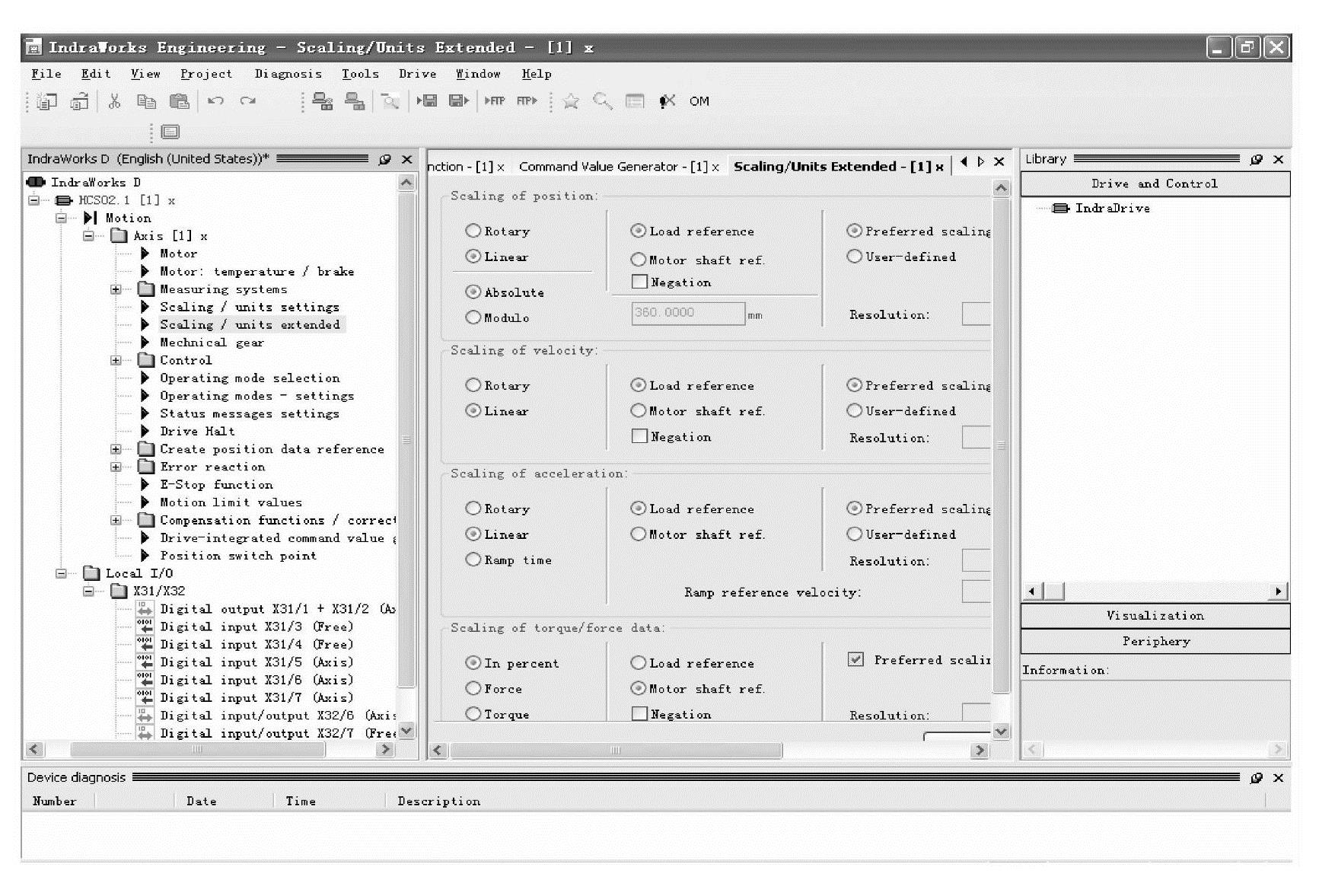
图6-2 IndraWorks Engineering工作界面
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。




