对于模块化的全软件型开放式数控系统而言,模块是构成系统的可重用基本单元。但是,目前对于模块的划分还没有统一的标准,在确定模块的复杂度时,需要对开放程度、运行效率、系统复杂度和集成费用等影响因素进行综合考虑。模块粒度较大,则可重用性和灵活性较差;反之,粒度越小,开放程度提高,可提供的选择也越多。但是构成系统的单元数目过多,可能导致模块间的交互过于复杂,运行效率会降低,性能也变差。所以,模块划分时,除了以一定的独立功能为界限,还要遵循粒度适中的原则。
本书采用面向对象的方法,依据模块化的分解思想和层级式组织方式建立开放式控制器。分析通用数控系统功能[90],总结现有系统控制结构的共同特征,并加以分类。将整个软件系统划分为以下几个基本功能模块,如图2-5所示。开放式控制器被分解为一系列功能模块,这些模块是分层组织的,上层模块向下层模块发出服务请求,并监控下层模块的运行;模块之间通过标准接口进行通信。
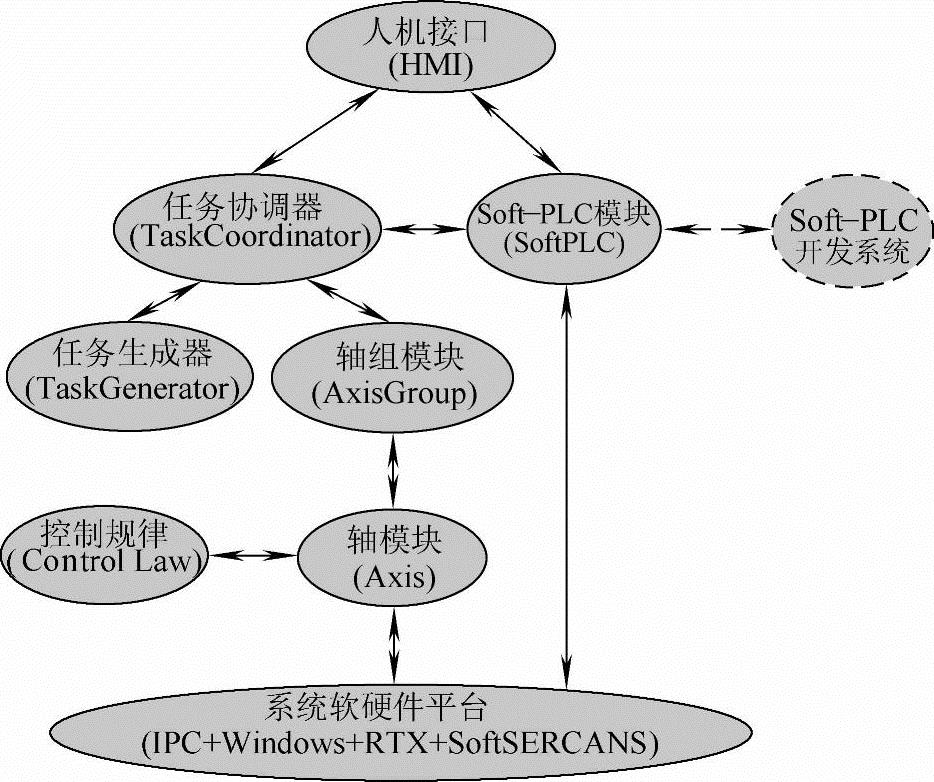
图2-5 开放式控制器的模块化结构
(1)人机接口(HMI) 负责操作者与控制器之间的交互,主要完成在系统运行前和运行中系统参数的修改和设定,如设定系统工作模式(自动、手动、点动,编辑MDI等)、系统初始化设定、坐标偏置设定,以及数控加工程序的编辑、加工和诊断信息的显示等。
(2)任务协调模块(TaskCoordinator) 进行任务分配,负责系统内各模块的协调与调度。
(3)任务生成模块(TaskGenerator) 也即任务生成器,根据一定的语法规则对数控加工程序进行语法检查,完成译码工作。对加工程序中给出的各种信息分离提取,生成包含运动信息的运动段指令和逻辑控制指令,还包括对运动指令进行刀具补偿。(www.daowen.com)
(4)轴组模块(AxisGroup) 完成加减速处理、插值任务,对译码得到的运动段按照一定的进给速度要求进行细分,进而得到单个插值周期内的直线段进给量;然后分解为相应轴上的位置目标指令,并输出给各个轴模块。
(5)轴模块(Axis) 接收来自轴组模块的指令,同时读取外部的反馈信息;再根据用户需求选择性地调用伺服控制规律完成位置控制或速度控制等功能,并将控制信息发送给外部执行单元。
(6)控制规律模块(Controi Law) 负责伺服控制规律的计算,提供多种控制策略,如模糊控制、自适应控制、神经网络等。
(7)Soft-PLC模块(SoftPLC) 又称为Soft-PLC运行系统,与任务协调模块进行信息交互,负责对外部输入和内部状态变量进行布尔运算得到相应输出和内部状态变量,并对外部输入输出设备进行控制,包括机电设备的起停、刀具的交换等。其中,通过任务协调器与Soft-PLC系统进行数据信息量交互的人机界面,包含面板控制量输入、各种状态显示及实时系统的控制。开关量输入如手动、自动、起动、急停、主轴正转、主轴停、主轴反转、进给循环、进给暂停等,其状态是作为PLC逻辑控制程序的输入量。显示灯如手动状态、自动状态、回原点、X原点、Y原点、Z原点等,是PLC控制程序的输出量。
(8)Soft-PLC开发系统 是带有调试和编译功能的PLC编程器。
图2-5中,Soft-PLC开发系统是整个Soft-PLC系统的一部分,整个Soft-PLC系统由开发系统和运行系统组成,两者是既相互独立又联系密切的两个应用程序,并可分别单独运行。系统的运行过程是先用PLC开发系统编辑开发PLC控制程序,生成目标代码,然后由PLC运行系统运行这个目标代码,来实现对系统的控制。具体内容将在第4章论述。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






