最简单的点焊机是圆弧运动式点焊机,俗称摇臂式点焊机。这种点焊机是利用杠杆原理,通过上电极臂施加电极压力。上、下电极臂为伸长的圆柱形构件,既传递电极压力,也传递焊接电流。
圆弧运动式点焊机的上电极绕上电极臂支承轴作圆弧运动。当上电极和下电极与工件接触加压时,上电极臂和下电极臂必须处于平行位置。只有这样,才能获得良好的加压状态。如果电极臂的刚度不够,可能发生电极滑移。
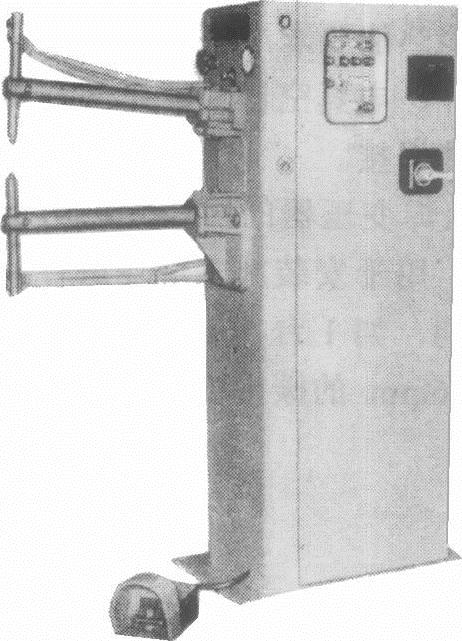
加压有3种操作方法:气动、脚踏和电动机-凸轮。图17-10是SO432—5A型气动摇臂式点焊机的外形图。这种焊机的臂伸长度的调节范围是250~500mm。在气动操作中,焊接程序由控制设备(装于机身内)自动操纵。电极运动快,并容易按工件形状和尺寸的不同而进行适当地调节。
气动摇臂式焊机的电极压力是活塞力与杠杆长度比的乘积。因此,当杆长比一定时,电极压力与用减压阀控制的压缩空气压强成正比。
在脚踏和电动机-凸轮操作的点焊机中,弹簧力代替活塞力,弹簧被脚踏推动的杠杆或被电动机驱动的凸轮压缩。电极压力与弹簧的压缩量成正比。
 (www.daowen.com)
(www.daowen.com)
图17-10 SO432—5A型气动摇臂式点焊机
脚踏操作的点焊机适用于焊接要求不高的小批量工件。电动机驱动的焊机用于压缩空气不易得到的场合。
圆弧运动式点焊机的主要优点是:①结构简单,生产及维修成本较低;②适用于多用途的电极变化,即电极臂问距、臂伸长度及下电极臂的方位,均可按工件形状及焊点位置做灵活调整;③合理的杠杆加压和配力结构运做灵活。
其缺点是焊接电流和电极压力会随臂伸长度的变化而变化,同时由于上电极的运动轨迹是圆弧形,不适宜凸焊。
圆弧运动式焊机是钣金、箱体、交叉金属丝焊接的最经济选择。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





