【训练要求】
对三菱D7001.5kW变频器进行合理接线来完成如下控制要求:
1)通过外接电位器来调节电动机运行频率,并通过面板来启/停;
2)通过模拟电流信号4~20mA来调节电动机运行频率,并通过面板来启/停;
3)通过开关ON/OFF来设定三段频率调节电动机运行速度,并通过面板来启/停。
【训练步骤】
训练步骤①:按照图4-28所示接线,即起动命令由变频器PU发出,频率命令由电位器设定。
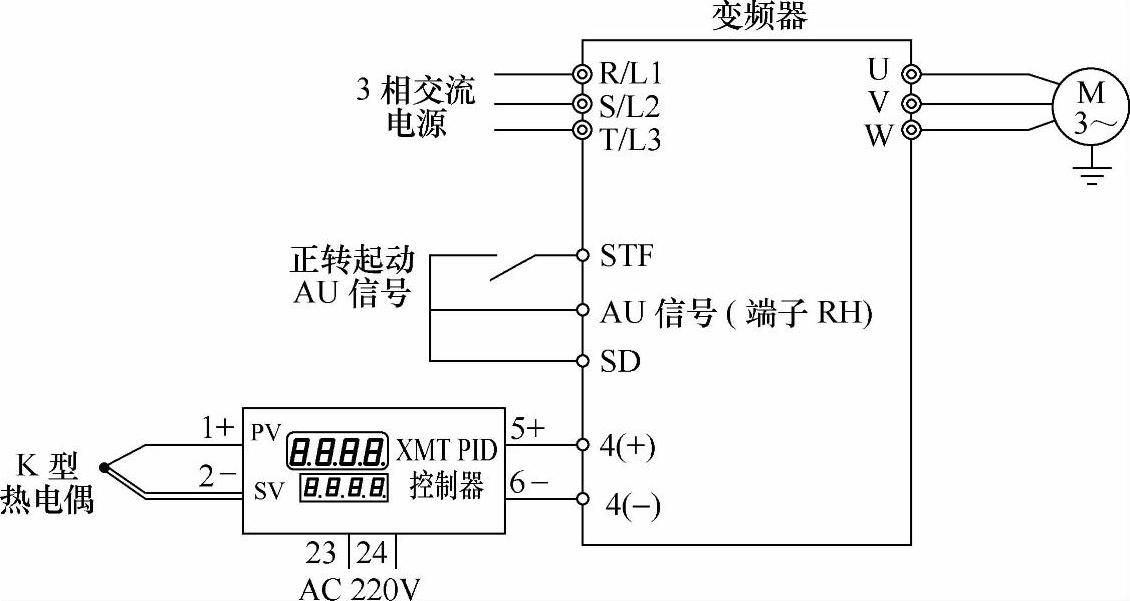
图4-28 变频器与XMT PID控制器的接线
训练步骤②:变频器参数设置。
Pr.1=50(上限频率50Hz);Pr.2=20(下限频率20Hz);Pr.178=60(正转指令);Pr.182=4(AU信号,端子4输入选择)。
训练步骤③:XMT PID控制器的参数设置与调整。
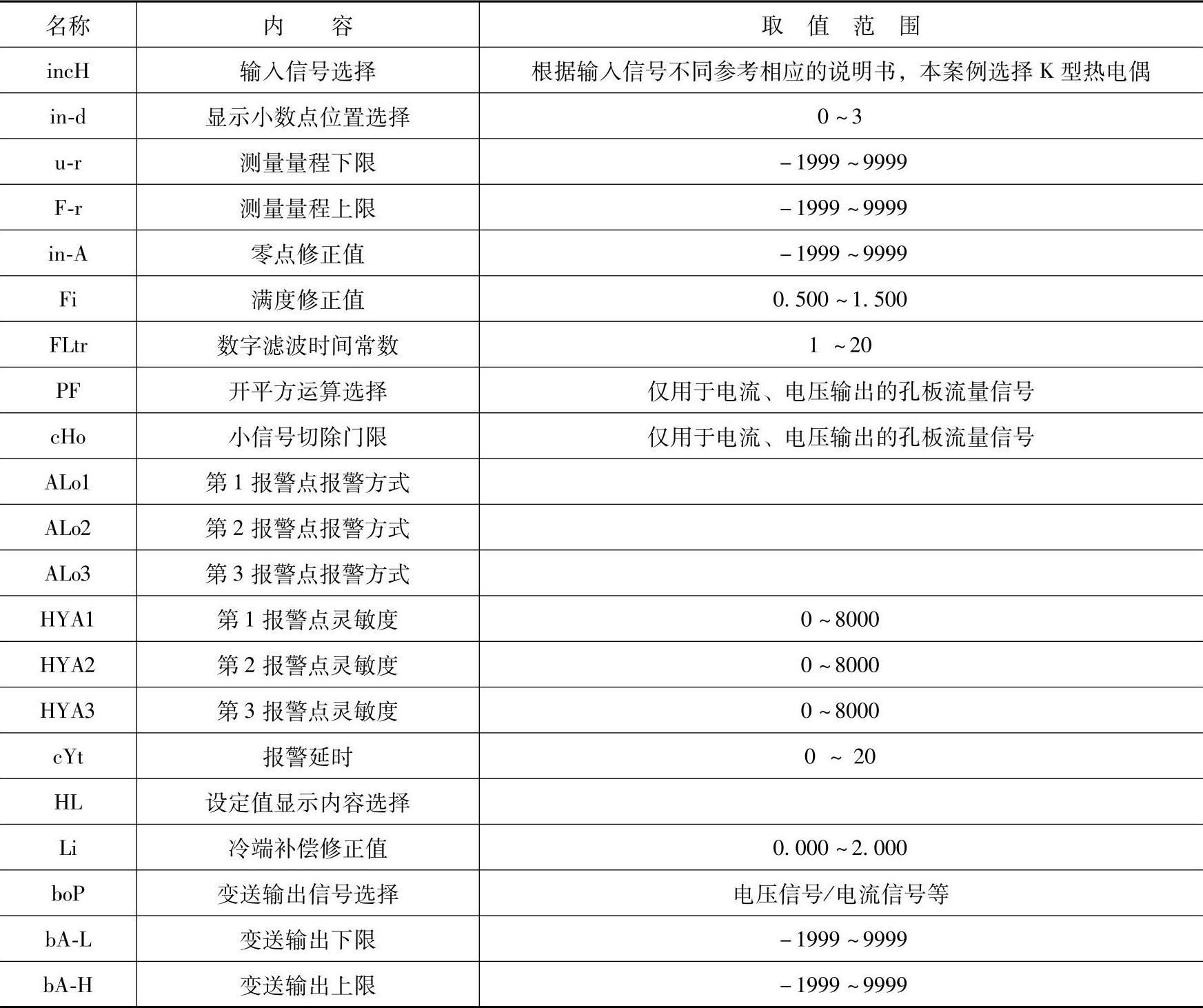
表4-4~表4-6列出了仪表的基本参数,共分3组参数,分别是设定值、PID控制、输入与输出。
表4-4 仪表的基本参数(第1组参数——设定值)

表4-5 仪表的基本参数(第2组参数——PID控制)
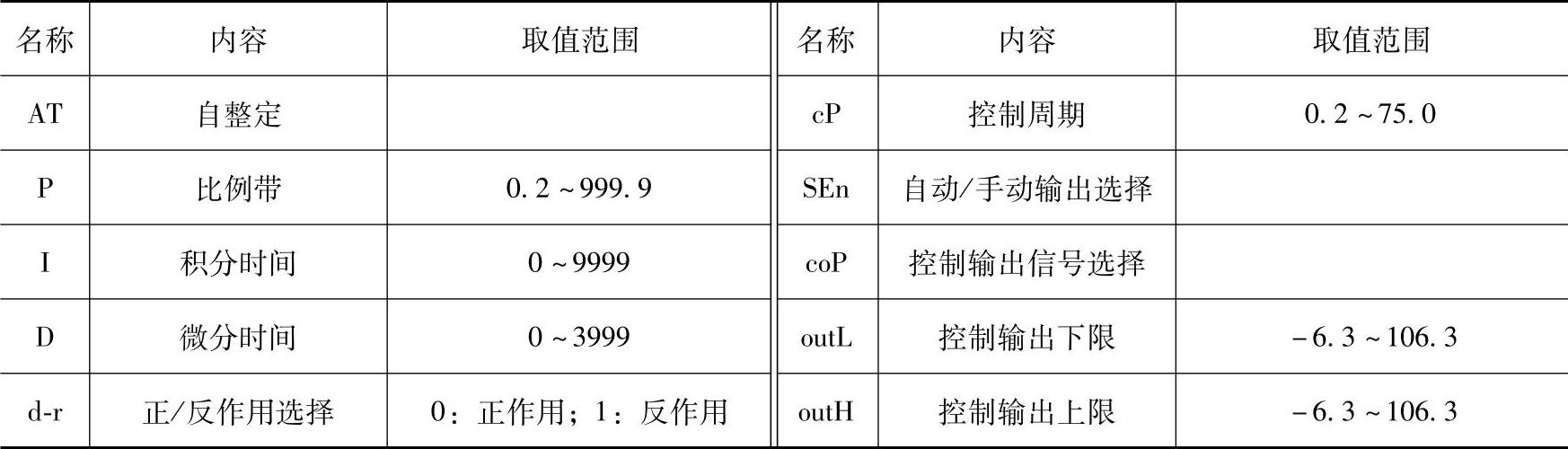
表4-6 仪表的基本参数(第3组参数——输入与输出)
训练步骤④:XMT PID控制器的PID整定。
AT——自整定选择,设置为ON时,起动自整定。
自整定起动后,输出将在outL和outH之间跳变。其出厂参数为0%和100%,对于变频控制和恒压供水等不允许输出大幅度变化的过程,可修改参数,如分别改为30%和70%,以限制输出的幅度。如仍不满足要求,可将PID参数手动设为推荐值P=60.0,I=90,D=0,再手动调整。
自整定起动后,测量值经过2~3个振荡周期,仪表自动计算出PID参数,自整定结束,进入正常PID控制。整个过程的示意图如图4-29所示。
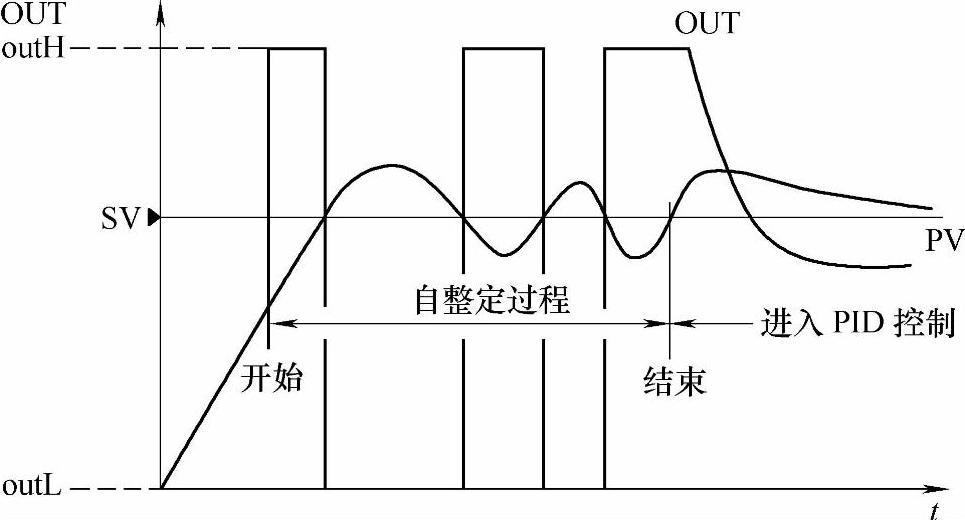
图4-29 自整定示意图
设置为OFF时,自整定停止/关闭,面板上AT指示灯灭。
仪表出厂时,AT为OFF,自整定关闭。起动自整定时,只需将AT设置为ON,此时面板上的AT指示灯亮。自整定结束后,AT值会自动变为OFF,面板上AT指示灯灭,进入正常PID控制过程。
自整定过程中,若要中止自整定,将AT改为OFF即可。
★自整定过程的长短,取决于被控过程的响应速度。对于慢系统,有时甚至需要数个小时。
★选择合适的时机进行自整定,比如加热炉升温的前期。若所得参数将用于稳态控制,则应选择系统相对稳定时进行自整定。(https://www.daowen.com)
★系统在不同阶段的特性不同,所以,在不同阶段进行自整定所得到的PID参数也不尽相同。
对于大滞后和变频控制等特殊系统,若正确地操作自整定而无法获得满意的控制效果,可参考下述经验,手动修改PID参数,进一步提高调节精度:
若到达稳态前超调过大,如对调节时间要求不高,可适当增大比例带。
如要缩短到达稳态的时间,而允许少量超调时,可适当减小比例带。
当测量值在设定值上下缓慢波动时,可适当增加积分时间或增大比例带。
当测量值在设定值上下频繁波动时,可适当减小微分时间。
P——比例带。比例运算参数,P越大,比例作用越弱。
I——积分时间。设置为0(秒)表示无积分作用,值越大,积分作用越弱。
D——微分时间。设置为0(秒)表示无微分作用,值越大,微分作用越强。
d-r——正/反作用选择。设置为0表示正作用(比如制冷)。测量值增加时,控制输出增加;设置为1表示反作用(比如加热)。测量值增加时,控制输出减小。
cP——控制周期。连续PID控制时,该参数一般设定为0.2(秒);位式PID控制时,该参数一般应大于5.0(秒)。
SEn——自动/手动输出选择。设置为ON时允许手动控制输出。在控制状态下,按 键可使第二显示窗切换显示Sv和输出值。当第二显示窗显示输出值时,按
键可使第二显示窗切换显示Sv和输出值。当第二显示窗显示输出值时,按 键可进行手/自动输出无扰切换。手动输出时面板上指示灯M亮,第二显示窗显示符号“
键可进行手/自动输出无扰切换。手动输出时面板上指示灯M亮,第二显示窗显示符号“ ”+输出百分比,自动输出时面板上指示灯M灭,第二显示窗显示符号“
”+输出百分比,自动输出时面板上指示灯M灭,第二显示窗显示符号“ ”+输出百分比。设置为OFF时不允许手动控制输出。在控制状态下,只能按
”+输出百分比。设置为OFF时不允许手动控制输出。在控制状态下,只能按 键切换显示Sv和自动输出值,不能进行手/自动切换。
键切换显示Sv和自动输出值,不能进行手/自动切换。
coP——控制输出信号选择。控制输出是仪表根据输入信号和目标设定值进行PID运算后,输出的对现场设备进行调控的信号。有以下几种形式:选择为 时:输出为4~20mA(或1~5V);
时:输出为4~20mA(或1~5V); 时:输出为0~10mA;
时:输出为0~10mA; 时:输出为0~20mA(或0~5V)。
时:输出为0~20mA(或0~5V)。
outL——输出限幅下限。该参数限制了输出控制量的下限值,不用限制时,该参数应设置为-6.3(%)。
outH——输出限幅上限。该参数限制了输出控制量的上限值,不用限制时,该参数应设置为106.3(%)。
答疑
问:对于温度控制系统中,如何调节P、I、D参数一直是比较犯难的事情,因为这些参数无法在产品出厂前调整好,必须到现场根据实际情况进行调整,是否有一种经验方法能快速调整这些参数?
答:PID闭环的参数调节P、I、D的三个参数调节是个难点,下面给出了一个调节口诀,以方便记忆:
参数整定找最佳,从小到大顺序查;
先是比例后积分,最后再把微分加;
曲线振荡很频繁,比例度盘要放大;
曲线漂浮绕大弯,比例度盘往小扳;
曲线偏离回复慢,积分时间往下降;
曲线波动周期长,积分时间再加长;
曲线振荡频率快,先把微分降下来;
动差大来波动慢,微分时间应加长;
理想曲线两个波,前高后低四比一;
一看二调多分析,调节质量不会低。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







