1.基本概念
我们知道,变频器U/f控制的基本思想是U/f=C,因此定义在频率为fx时,Ux的表达式为Ux/fx=C,其中C为常数,就是“压频比系数”。
由图1-13可以看出,当电动机的运行频率高于一定值时,变频器的输出电压不再能随频率的上升而上升,我们就将该特定值称为基本运行频率,用fb表示。也就是说,基本运行频率是指变频器输出最高电压时对应的最小频率。在通常情况下,基本运行频率是电动机的额定频率,如电动机铭牌上标识的50Hz或60Hz。同时与基本运行频率对应的变频器输出电压称为最大输出电压,用Umax表示。
当电动机的运行频率超过基本运行频率fb后,U/f不再是一个常数,而是随着输出频率的上升而减少,电动机磁通也因此减少,变成“弱磁调速”状态。
基本运行频率是决定变频器的逆变波形占空比的一个设置参数,当设定该值后,变频器CPU将基本运行频率值和运行频率进行运算后,调整变频器输出波形的占空比来达到调整输出电压的目的。因此,在一般情况下,不要随意改变基本运行频率的参数设置,如确有必要,一定要根据电动机的参数特性来适当设值,否则,容易造成变频器过热、过电流等现象。
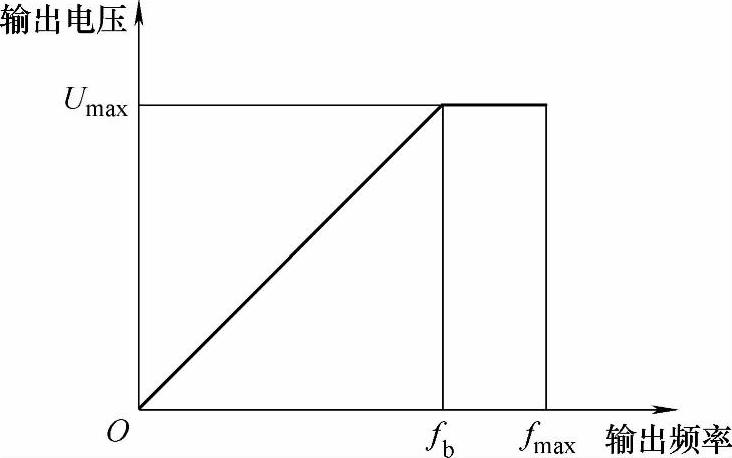
图1-13 基本运行U/f曲线
2.预定义的U/f曲线和用户自定义U/f曲线
由于电动机负载的多样性和不确定性,因此很多变频器厂商都推出了预定义的U/f曲线和用户自定义的任意U/f曲线。
预定义的U/f曲线是指变频器内部已经为用户定义的各种不同类型的曲线。如某品牌A变频器有三种特定曲线(见图1-14a),曲线1为3.0次幂降转矩特性、曲线2为1.7次幂降转矩特性、曲线3为1.2次幂降转矩特性。某品牌变频器B则有4种定义的曲线如图1-14b所示,其定义的方式是在电动机额定频率一半(即50%fN)时的输出电压是电动机额定电压的30%时(即30%UN)为曲线1,35%UN为曲线2,40%UN为曲线3,UN为曲线4。这些预定义的U/f曲线非常适合在可变转矩(如典型的风机和泵类负载)中使用,用户可以根据负载特性进行调整,以达到最优的节能效果。

图1-14 预定义U/f曲线
a)A变频器 b)B变频器
对于其他特殊的负载,如同步电动机,则可以通过设置用户自定义U/f曲线的几个参数,来得到任意U/f曲线,从而可以适应这些负载的特殊要求和特定功能。自定义U/f曲线一般都通过折线设定,典型的有三段折线和两段折线。
以三段折线设定为例如图1-15所示,f通常为变频器的基本运行频率,在某些变频器中定义为电动机的额定频率;U通常为变频器的最大输出电压,在某些变频器中定义为电动机的额定电压。如果最大输出电压等于额定电压或者基本运行频率等于额定频率,则两者是一回事,如果两者之间数值不相等,就必须根据变频器的用户手册来确定具体的数据。图1-15中给出了三个中间坐标数值,即(f1,U1)、(f2,U2)、(f3,U3),用户只需填入相应的电压值或电压百分比以及频率值或频率百分比即可。如果将其中的两点重合就可以看成是两段折线设定。(https://www.daowen.com)
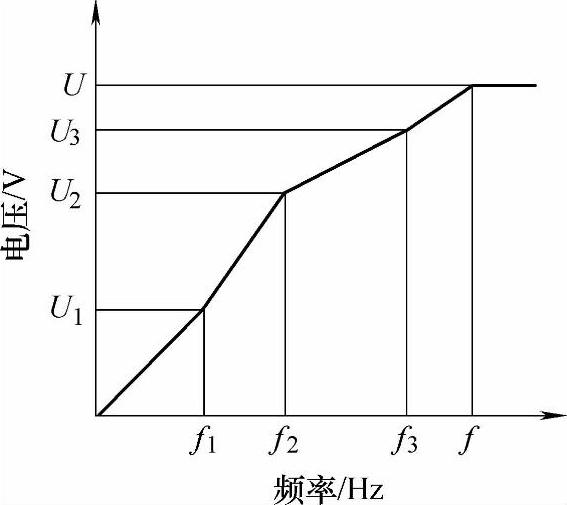
图1-15 用户自定义U/f曲线
虽然用户自定义U/f曲线是可以任意设定,但是一旦数值设定不当,就会造成意外故障。比如说低频时转矩提升电压过高,造成电动机起动时低频抖动。所以,U/f曲线特性必须以满足电动机的运行为前提条件。
3.U/f曲线转矩补偿
变频器在起动或极低速运行时,根据U/f曲线,电动机在低频时对应输出的电压较低,转矩受定子电阻压降的影响比较明显,这就导致励磁不足而使电动机不能获得足够的旋转力,因此需要对转矩进行补充补偿,这称为转矩补偿。通常的做法是对输出电压做一些提升补偿,以补偿定子电阻上电压降引起的输出转矩损失,从而改善电动机的输出转矩,如图1-16所示。
转矩补偿可以根据变频器的参数设置选择手动和自动,如手动设置则允许用户对设定范围可以在0~20%或30%Umax之间任意设定,如自动设置则是变频器根据电动机起动过程中的力矩情况进行自动补偿,其参数是随着负载变化而更改的。
4.闭环U/f控制
闭环U/f控制就是在U/f控制方式下,设置转速反馈环节。测速装置可以是旋转编码器,也可以是光电开关,安装方式比较自由,既可以安装在电动机轴上,也可以安装在其他相关联的位置。同样,通常我们所说的不带转速反馈的U/f控制,也称为开环U/f控制。
闭环U/f控制选用速度反馈信号可以选用一相或者两相信号,一相信号如接近开关或是旋转编码器的A相和B相之一。旋转编码器是一种测量旋转角度的测量器件,它集机、光、电技术于一体,通过光电转换,将角位移转换成相应的电脉冲或数字信号输出。旋转编码器通常采用两个相位差90°的方波编码方式,其旋转方向由两个波形的相位差决定。旋转编码器有很多种型号,通常的速度反馈则选用增量型编码器,电动机的运动速度由一定时间内编码器所产生的脉冲信号决定。脉冲信号输出即可与变频器的PG接口相连接,就可以得到测量。编码器的精度由旋转一周产生的方波数决定,当旋转一周可产生2000个方波时,每一个方波周期表示为360°/2000,其最大的响应频率达到100kHz左右。
图1-17所示为旋转编码器(PG)与变频器(VF)组成的闭环U/f控制接线图。图1-17中,PS+/PS-为编码器(PG)的工作电源,A+信号为A相信号或B相信号,这里的控制方式采用一相反馈。

图1-16 转矩补偿
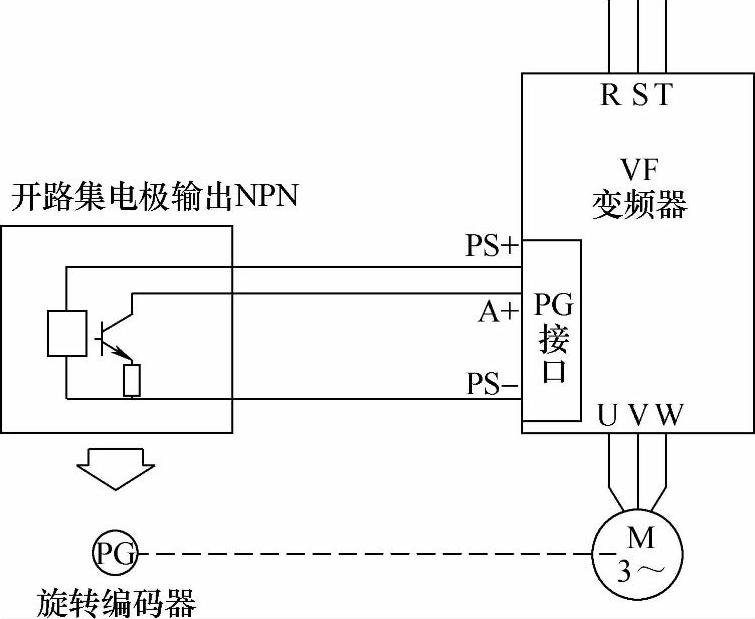
图1-17 闭环U/f控制接线图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






