情感建模是情感机器人研究中的关键和难点,一个机器人是否能够表现出类人的情感,取决于其是否有一个合理的情感模型[33]。但是情感究竟包括那些状态呢?我们可以举出饥饿、恐惧、伤心、疲劳、高兴、放松、紧张、激动等。它们都是模糊的概念,都表征着复杂的生理活动和心理特点。然而想完全地研究出情感空间的所有子集,并给予严格的定义,是极其困难的,本节中不把此问题进行专门讨论,但可以从科学研究的常用方法出发,即先把问题简单处理,试图寻求一些有意义的结论。
生命体的不同情感构成了一个情感集合Ue。为简单起见,在本节的机器人平台的研究中,仅包含最简单的恐惧、愤怒与高兴的三个子集构成的Ue。显然,生命体的情感状态,不仅仅是单单处于某一种的状态,即可能出现即恐惧又有生气的状态,然而恐惧与高兴是不可能同时出现的。那么,把恐惧、生气与高兴看作三维的坐标,那么生命体的情感状态就存在一个三维情感空间里。同理,可以研究更复杂的情感,这样情感空间就是n维的情感空间。这里只能猜想,情感空间的维数是有限的。因为,尽管人类的情感是复杂的,但能感受到并能用语言表达的情感是有限的,所以在这里,单就上述三种简单的情感进行讨论。
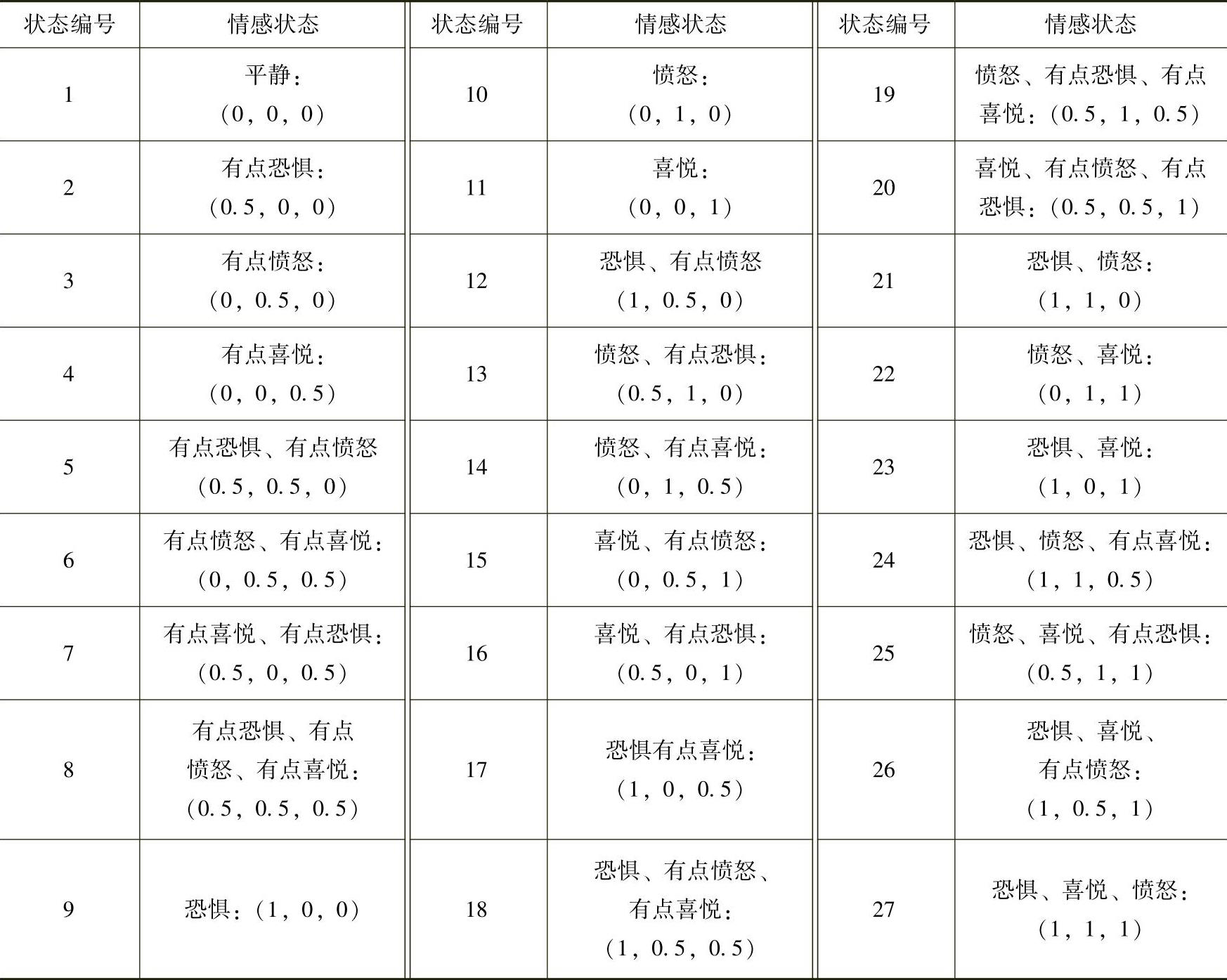
为进一步简化问题,规定情感状态的每一个维数仅取0、0.5、1三个数值。比如就恐惧而言,则具有不恐惧、有点恐惧和恐惧三个状态。这种三维情感空间里就有27个情感状态。用a表示恐惧,b表示愤怒,c表示喜悦,于是有a∈(0,0.5,1),b∈(0,0.5,1),c∈(0,0.5,1)。规定这三个坐标的顺序为abc,于是构成图8-28所示三维坐标的情感空间。于是可枚举的情感状态有27个状态,见表8-5。
那么很有意思的一点就是原点(0,0,0),这一点不仅仅代表为平静,而且还代表其他未知的情感状态。也就是说,当生命体仅仅存在上述三种情感时,这就是完全的情感空间,原点就是平静点。而当生命体的情感不仅仅是这三种情感时,那么称这是不完全的情感空间,其原点可能是平静点,也可能是其他某种情感状态,但这种情感状态并未包含在所构造的这个情感空间之内。
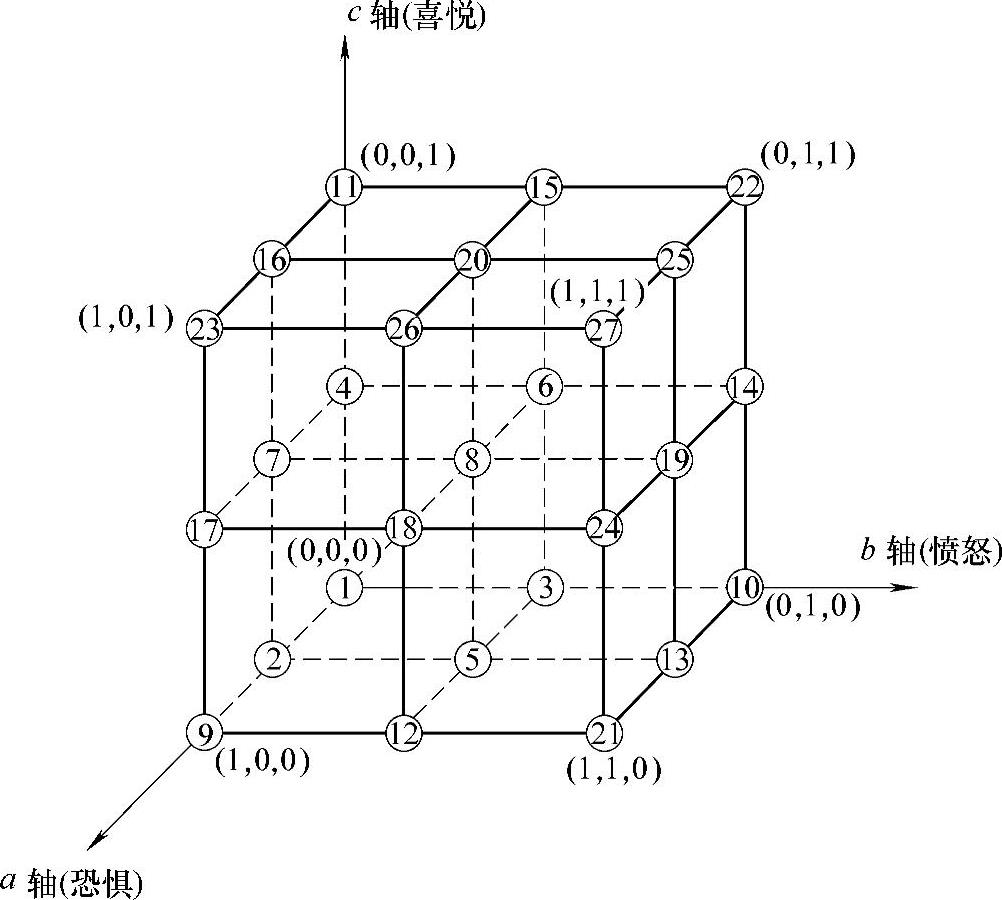
图8-28 三维情感坐标
表8-5 情感状态空间中的27种状态
当生命体的情感在这个状态空间内变化时,是具有统计性规律的,这就是一个马尔科夫过程。由于存在27个状态,故构成了27维的概率转移矩阵。
因此,各个状态互相转移的概率Pij,(i,j∈[1,2,3,…,27])构成了27维的概率矩阵AP:
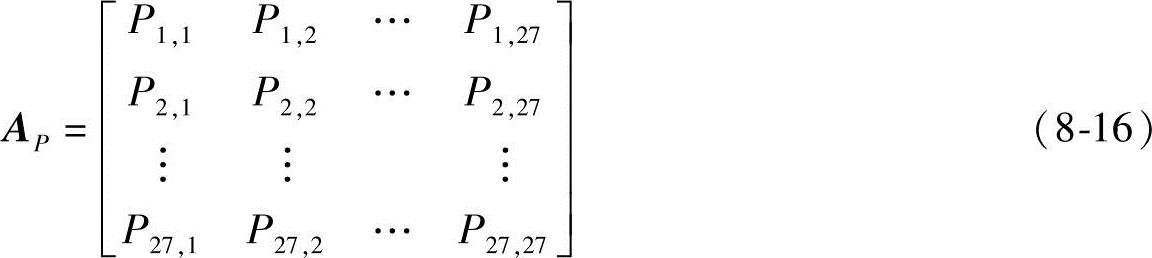
式中,Pij为第i状态到第j状态的概率,并且有如下关系:

这里,可以进一步得出以下结论:
把每一种情感变化划分为n个级别,m种情感可以构成m维的情感空间,那么就具有nm个情感状态。令l=nm,于是得到l维的概率矩阵如下:
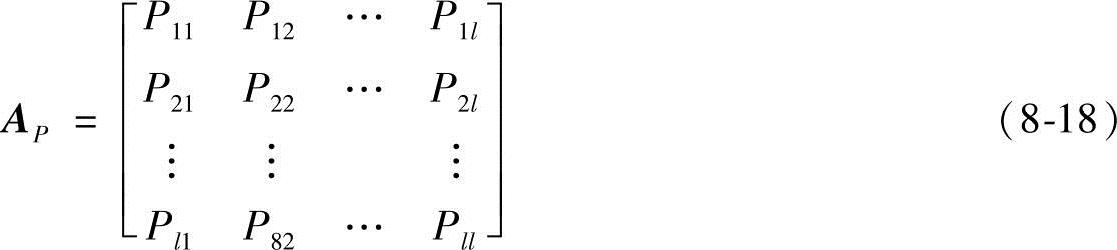
式中,Pij(i,j∈[1,2,3…,l]),为第i状态到第j状态的概率,并且满足如下关系:

到此,构建了情感变化的概率性模型。进一步的工作就在于研究概率矩阵中的每一个元素的取值问题。
情感模型建立是个人机器人研究中的重点,一个情感机器人是否能够表现出类人的情感,取决于其是否有一个合理的情感模型。本节中建立了一个如图8-28所示的情感空间,在这个情感空间模型中,某一时刻情感总是处于某一特定的点,而下一时刻情感将如何转移?情感在这个空间的转移过程不仅仅与情感的前一时刻的位置有关,还与外界环境对机器人的刺激有关。下面我们主要研究个人机器人在多感觉信息作用下的情感转移。
外部环境的刺激是情感转移的最大原因。建立情感模型的意义就在于希望其能对外部刺激产生反应,得到一个新的情感状态。外界对机器人的刺激包括声音、图像、其他信息等。上面这些机器人通过传感器获得的信息构成了机器人的环境模型。
首先建立一个情感空间模型,如图8-28所示。情感空间是机器人所有情感的活动空间,其中的每一个点都表示一个特定的情感状态。机器人在感受到外部的刺激后会在情感空间发生情感状态的转移,通过读取机器人情感空间的状态,可以使机器人表现出各种不同的情感,确定情感在情感空间内是怎样变化的,即情感状态是怎样由情感空间中某一点转移到另一点的。情感机器人通过传感器感知外界刺激,应用第4章中所述的情感信息融合,外界刺激推动情感状态的转移,机器人达到一个新的情感状态,情感信息处理结构如图8-29所示,S表示外界激励程度,p表示基本可信度。
首先,需要设定一个初始状态,即要设定在初始时刻,情感处于那个节点上。那么要判定下一时刻情感将到达什么状态呢,这是具有概率性的行为。假定初始情感处于平静状态,即处于情感空间的原点,也就是说,在没有外界干扰的情况下,情感的状态是趋于平静的;然而情感是不可能绝对平静的,情感的状态是有一定波动的;当受到外界刺激时,情感状态会发生转移。
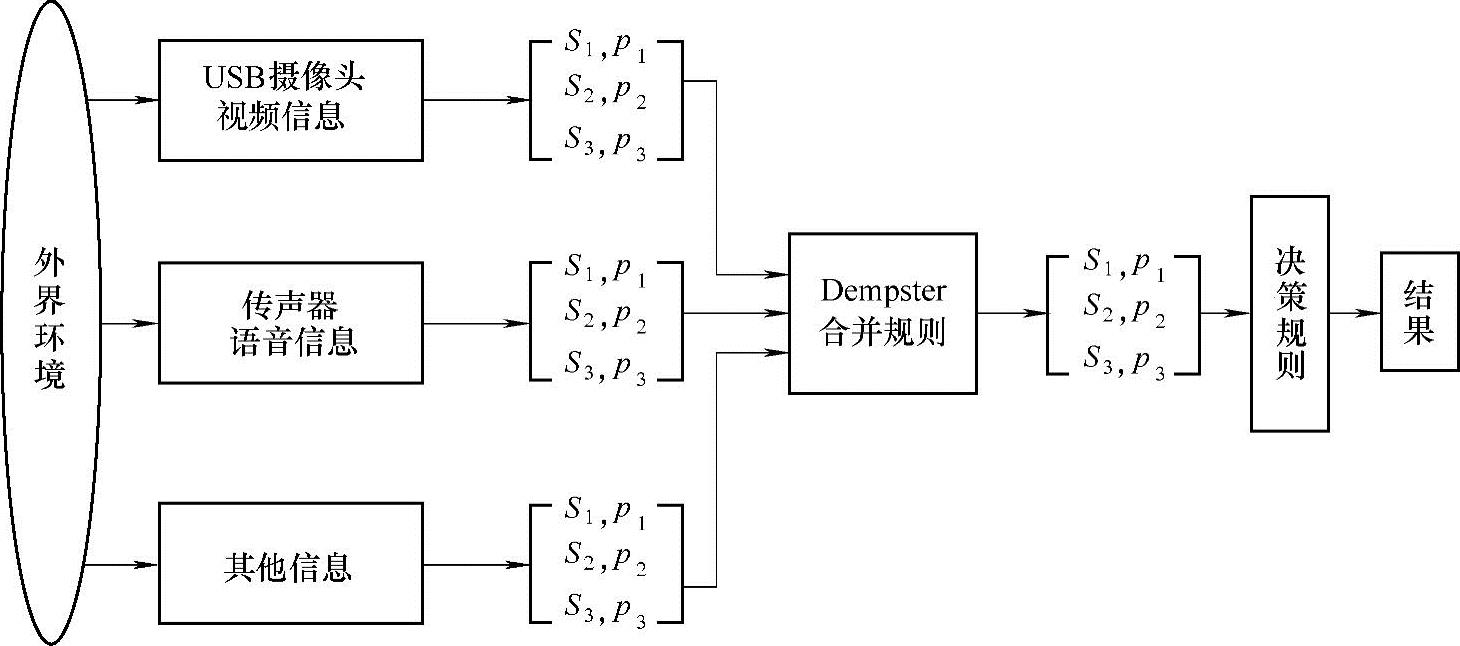
图8-29 情感信息处理结构
下面就根据不同参数的设定,模拟一个在外界刺激的情况下的情感的变化过程。只考虑在受到外界威胁刺激时,个人机器人恐惧情感的状态转移,为进一步简化问题,则规定情感状态的每一个维数仅取0、0.5、1三个数值。就高兴而言,则具有平静、有点高兴和很高兴三个状态。(www.daowen.com)
对于原点(0,0,0),这一点不仅仅代表平静,而且还代表其他未知的情感状态。也就是说,当生命体仅仅存在上述三种情感时,这就是完全的情感空间,原点就是平静点。而当生命体的情感不仅仅是这三种情感时,那么称这是不完全的情感空间,其原点可能是平静点,也可能是其他某种情感状态。但不管它是那种情感状态,在受到外部刺激时,都会依照概率最大方向发生转移。
对外部刺激因素,选择来自视觉、语音、其他信息。从这三个感官中,提取出环境的激励因素,激励强度I在[0,1]区间内取值,按其激励大小,分为三个级别:轻度激励、中度激励、重大激励。选择阈值β1、β2,当0≤I<β1时,判定为轻度激励;当β1≤I<β2时,判定为中度激励;当β2≤I时,判定为重大激励。根据人类经验,假定在受到轻度激励时,高兴状态向高兴强度减小方向转移概率最大;在受到中度激励时,高兴状态保持原状态概率最大;在受到重大激励时,高兴状态向高兴强度增加方向转移概率最大。当受到外界激励时,机器人情感状态将向转移概率最大的方向转移,状态转移如图8-30所示。
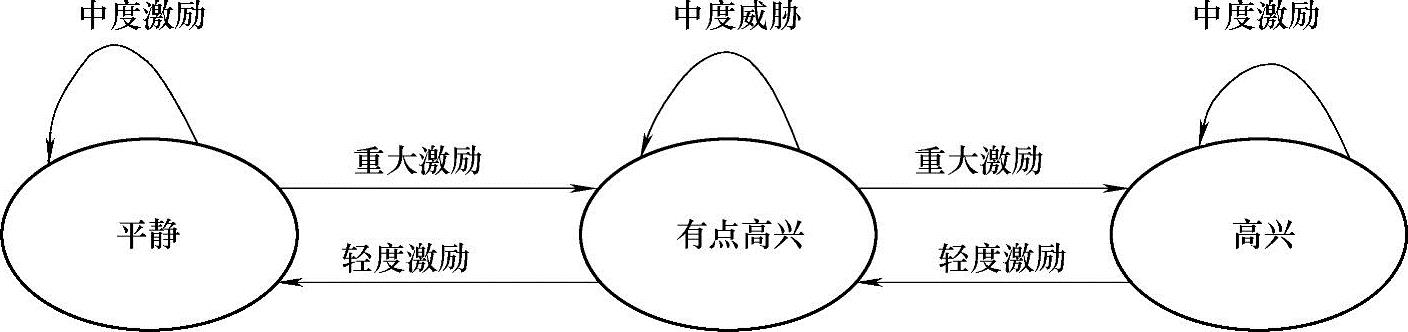
图8-30 情感状态转移
应用D-S证据理论,分别融合来自视觉和语音、视觉和其他、语音和其他信息因素,设Tl表示轻度激励,Tm表示中度激励,Th表示重大激励,目标识别框架为U={Tl,Tm,Th}。mv(·)表示由视觉确定的基本概率赋值;ms(·)表示由语音确定的基本概率赋值;mt(·)表示由其他信息确定的基本概率赋值,则由三种情感信息确定的基本概率赋值见表8-6所示。
表8-6 由三种信息确定的基本概率赋值

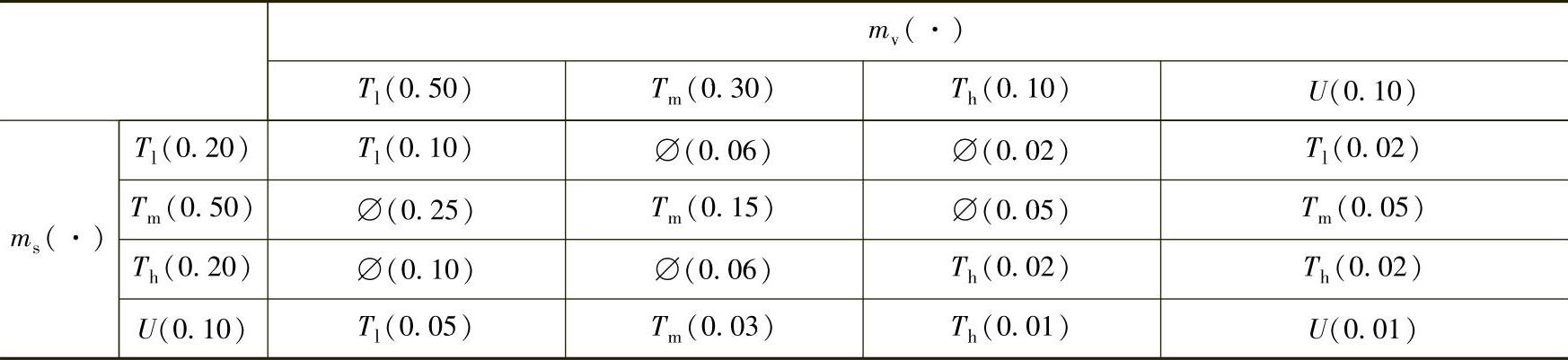
按Dempster合并规则对视觉和语音关于激励状况的基本概率赋值进行组合,mv(·)和ms(·)组合情况如表8-7所示,其中, 表示空集。mv(·)和ms(·)两批证据的不一致因子K为
表示空集。mv(·)和ms(·)两批证据的不一致因子K为
K=0.06+0.02+0.25+0.05+0.10+0.06=0.54 (8-20)
于是,视觉和语音情感信息融合后的基本概率赋值为
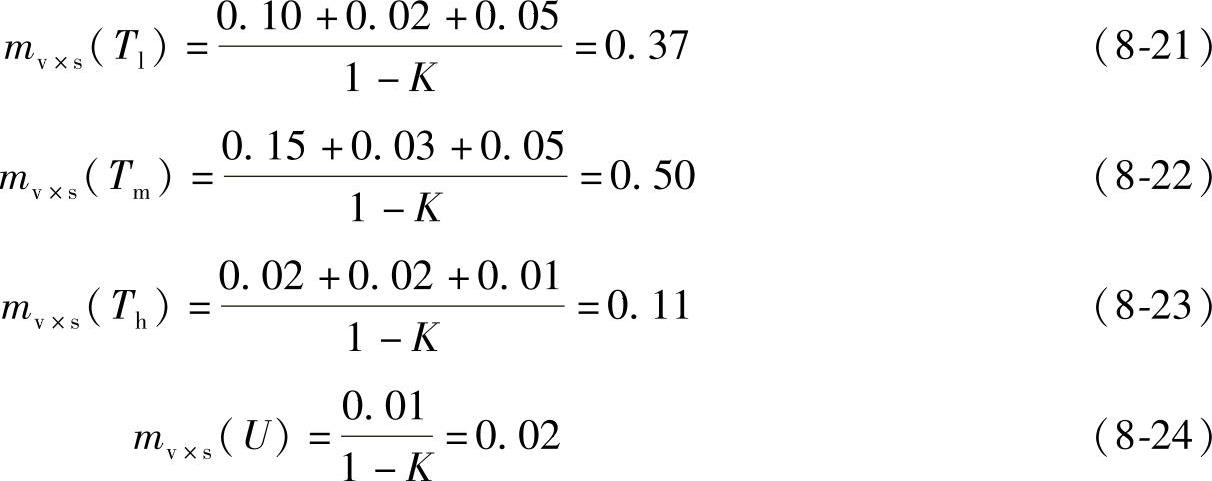
表8-7mv(·)和ms(·)组合情况
由计算结果可以看出,通过融合,不确定性的基本概率赋值下降到0.02。当采用基于基本概率赋值的决策方法时,若选择门限ε1=ε2=0.1,则最终的决策结果是Tm,即外界激励程度为中度,高兴情感状态维持原状态。同理,随机产生100组数据,分别融合来自视觉和语音、视觉和其他信息、声音和其他信的情感信息(外界鼓励程度),引起情感状态转移。视觉和语音激励因素综合作用引起高兴情感状态转移情况如图8-31所示,视觉和其他信息因素综合作用引起高兴情感状态转移情况如图8-32所示,语音和其他信息综合作用引起高兴情感状态转移情况如图8-33所示。
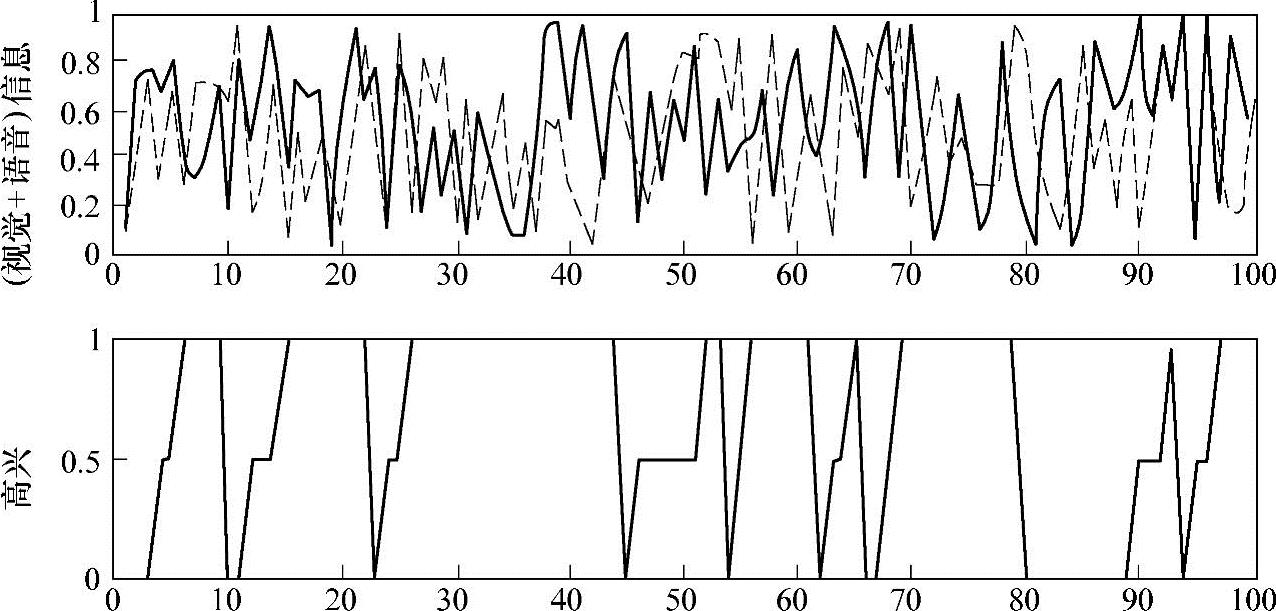
图8-31 视觉和语音信息综合作用引起高兴情感状态转移情况(横坐标单位为“组”)
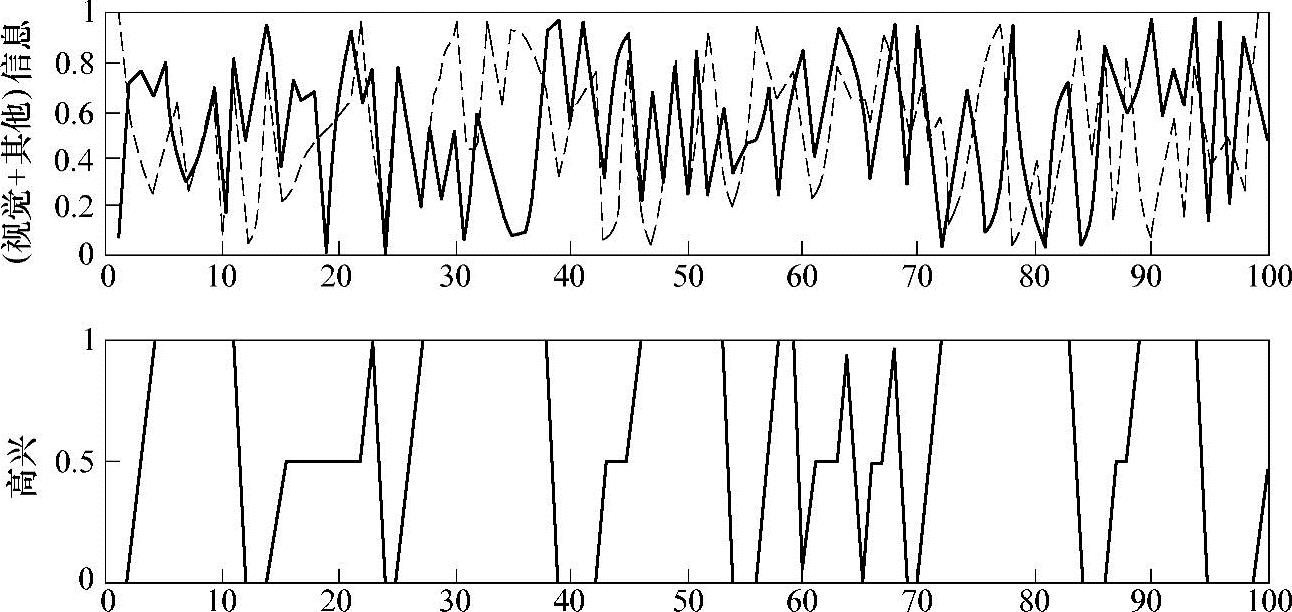
图8-32 视觉和其他信息因素综合作用引起高兴情感状态转移情况(横坐标单位为“组”)
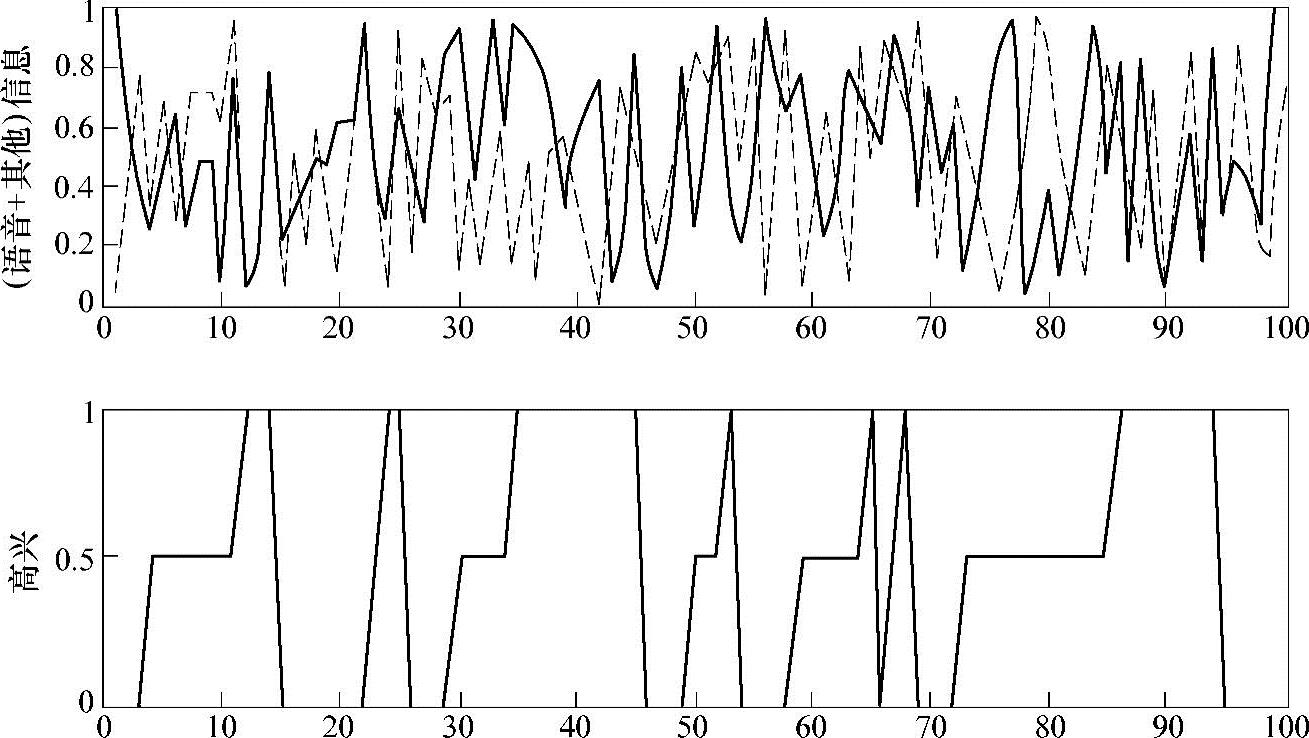
图8-33 语音和其他信息因素综合作用引起高兴情感状态转移情况(横坐标单位为“组”)
视觉、语音和其他信息因素综合作用引起高兴情感状态转移情况,如图8-34所示。在机器人实验系统中,每种情感信息提供的环境特征都是彼此独立的,即感知的是环境各个不同的侧面,将这些特征综合起来就可以构成一个更为完整的环境描述,这些信息称为互补信息。从以上各图可以看出,视觉、语音和其他信息对环境信息的理解可能是不一致的,经过两种信息融合处理后,系统对环境信息理解的一致性提高。三种信息经融合后,最终获得对环境的一致性解释。互补信息的融合减少了由于缺少某些环境特征而产生的对环境理解的歧义,提高了系统描述环境的完整性和正确性,增强了系统正确决策的能力。
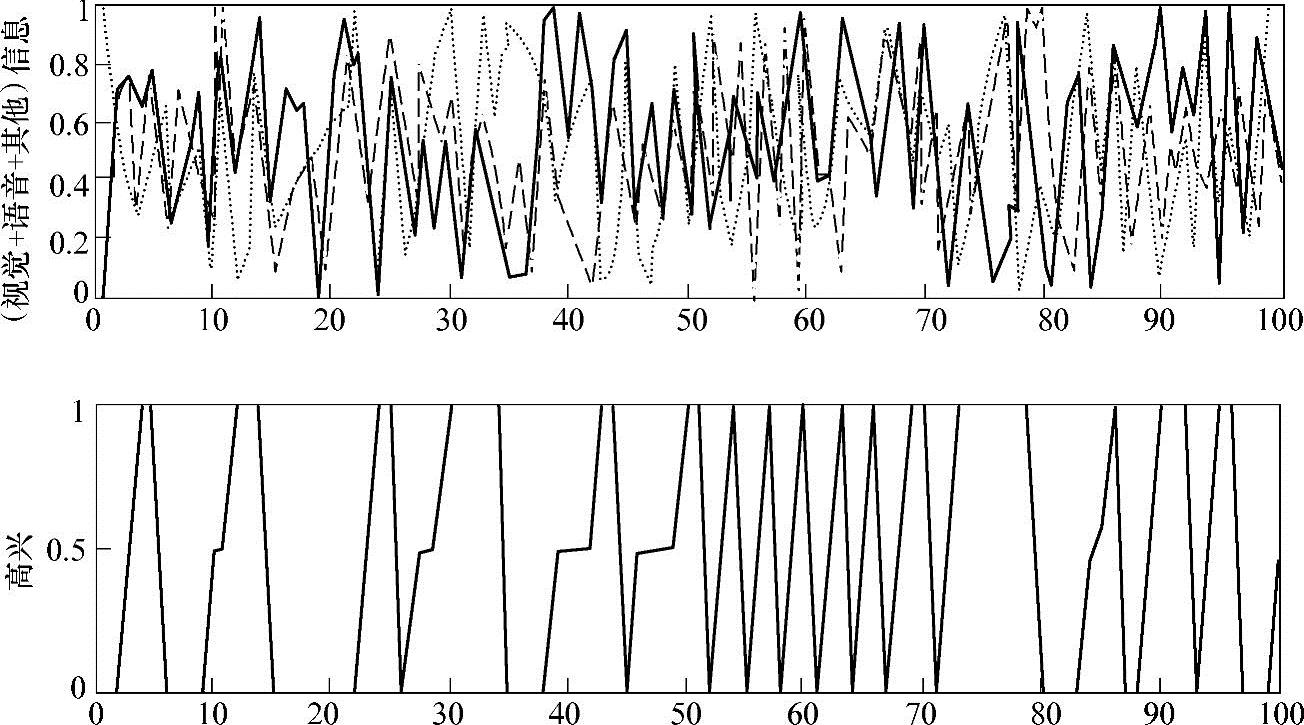
图8-34 视觉、语音和其他因素综合作用引起恐惧情感状态转移情况(横坐标单位为“组”)
因此,采用信息融合技术对多方面的情感信息进行融合,降低了机器人平台的不确定性,提高了系统的识别能力,获得对环境的正确全面理解,使机器人实验系统具有容错性,可以保证系统情感信息处理的快速性和正确性。
《国家中长期科学和技术发展规划纲要(2006~2020年)》中,已经把对个性化的智能机器人和智能服务机器人列入其中,这是国家对机器人研究提出期望的任务,同时也是机器人研究者难得的机遇。服务机器人研究是多学科、多技术的交叉融合研究,它带来的挑战也是多方面的,需要我们进行长期深入的研究。以上所介绍的研究工作还只是初步的,而具有人工智能和机器情感的个人服务机器人,是人工心理研究所追求的目标。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。







