同样,机器人在与用户进行交互的过程中,可以通过多种方式来表达机器人情感。目前国内外的研究包括情感语音合成、情感动作表达、情感音乐表达等。
1.情感语音合成
情感语音合成是指以更贴近人的生活和接近人自然的感情流露的方式来输出合成语音。人的情感被分为基本类和扩展类两种[26],基本类对情感的描述起到重要的作用。通常情况下,情感语音的研究主要集中在情感基本类与语音声学参数的关联分析上。目前,针对情感基本类的常见定义有:害怕、发怒、高兴、悲伤、惊奇和厌恶等六种,尽管如此,针对不同的场合,其分类标准依然会有所区别。通常的扩展,包括区别发怒的特征,增加蔑视、懊恼、厌倦、担心、傲慢和爱慕等,这些可以由性别特征及其他特征区别开。每一种语言均包含着一些特殊的情感用语,Whissell收集了107种反映情感状态的词[27],Plutchik则列出了142种反映情感状态的词[28],这些词覆盖了很大范围的情感状态,只有很少一部分可以被归纳到基本类。
情感发音的实现,需要通过语音的声学参数体现人的情感特性。Sylvie J.L.Mozziconac-ci在IPO(Hart等,1990)语调方法的基础上,初步加入了情感控制参数,增加了语音合成的表现力。Cohn针对情感的声学特性编写了简单的情感编辑器,使研究人员可以细致地观测情感控制参数对语音输出的影响,对情感语音合成的研究起到了较好的推动作用[29]。为建立较为完整的情感语音合成系统,涉及情感语料库设计,情感韵律特征分析及情感建模,语法、语义对情感发音的影响,面向口语的韵律分析及建模,情感语音声学模型的建立,场景分布对情感发音的影响,以及韵律个性化等一系列的研究。
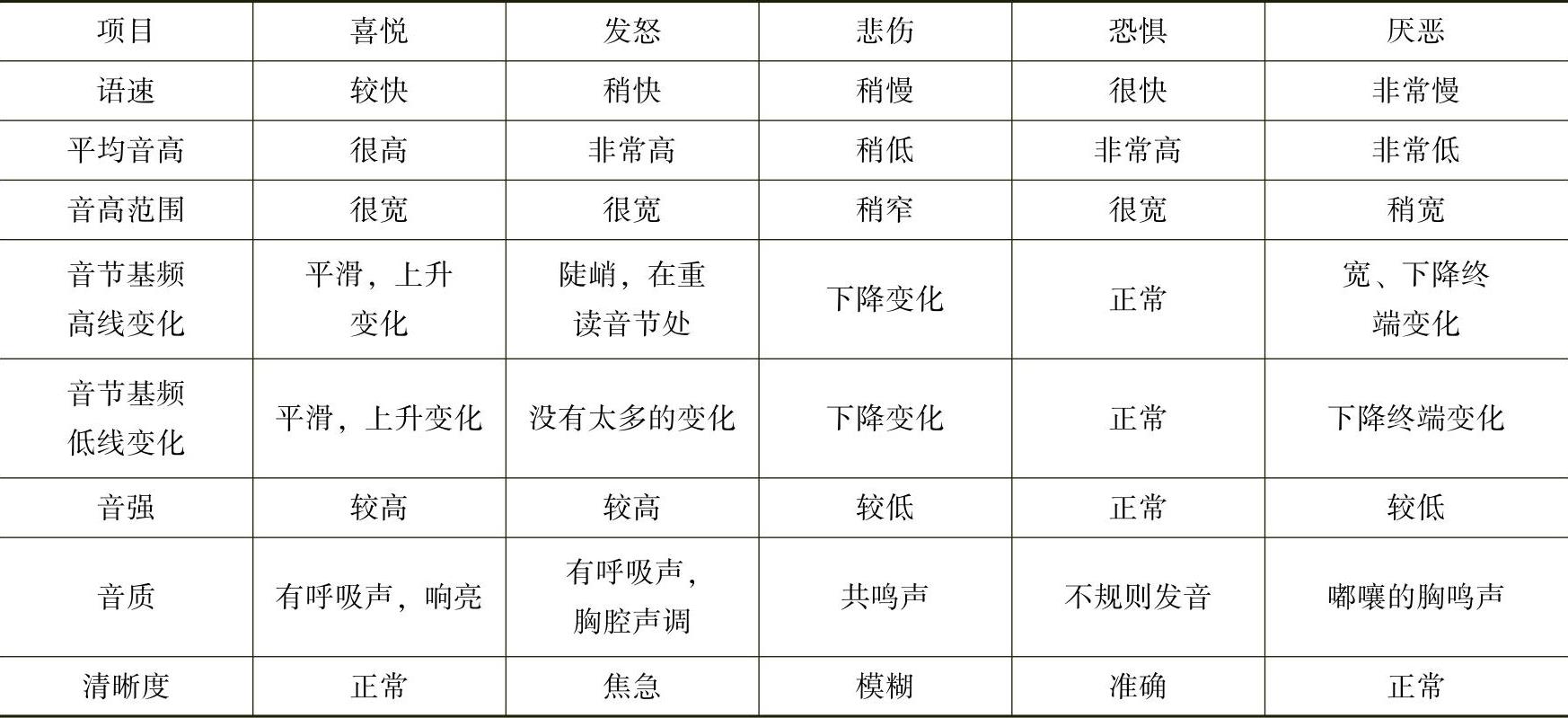
由于情感表现的多样性和复杂性,导致情感声学参数的数值分布多呈现较大的离散特性,表8-4则针对五种基本情感状态列出了几种基本声学参数的较为平均的体现。
2.具有情感的动作表达
人类的不同肢体动作在很多情况下都表达了自己的不同感情。在机器人中,可以通过机器人的不同肢体动作来表达机器人的感情状态。机器人可以用双手恭礼、拥抱、敬礼动作来表达喜悦,用挥舞左手、挥舞右手、挥舞双手来表达愤怒,用左转、右转、后退和摇头表达悲伤。机器人部分动作如图8-26所示。
表8-4 五种主要情感的声学特征
 (https://www.daowen.com)
(https://www.daowen.com)
图8-26 机器人情感动作
a)敬礼 b)拥抱 c)挥舞双手
3.音乐的主要表现内容是情感[30]
音乐的情感是通过不同的音符在时域中巧妙地组合来表达的。通常对于音乐情感的研究都是从音乐学和心理学的角度出发,通过分析音乐作品的结构特点来解释其所表现的情感色彩;也可以从一个新的角度来研究音乐的情感特征,就是从物理学来说音乐是一种波动信号,探讨具有不同舒缓激越情感色彩的音乐所具有的特征是音乐情感特征提取与识别的核心内容[31]。
为了对情感特征进行合理的描述,根据在音乐心理学领域得到广泛认可的Hevner词表[32],给出一种“情感环”的结构,如图8-27所示,以此模型作为音乐的情感分类。
在机器人音乐中,存放着大量的音乐,每个音乐片断体现了不同的情感特征。机器人可以依据不同的情感状态,随机地播放相应的音乐来表示自己的感情。对于音乐的情感特征的区分,则可以采用专家的意见分好后,赋予不同的情感值。
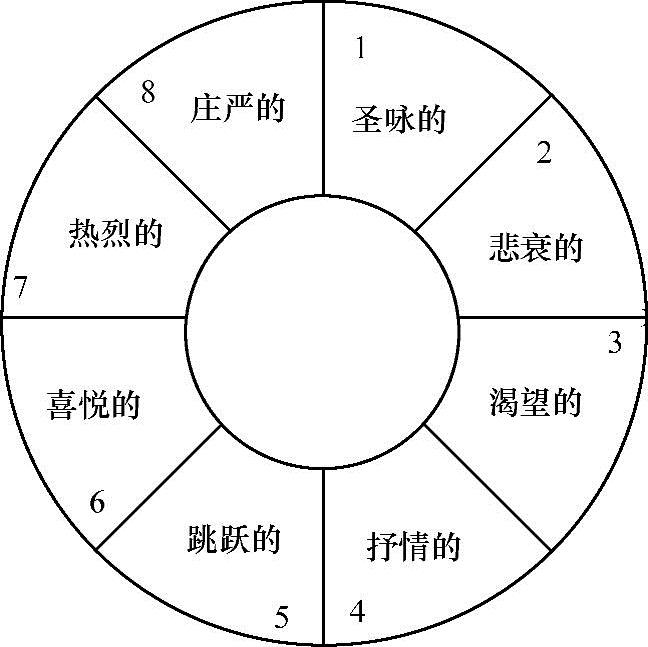
图8-27 情感环示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






