建立实验系统的主要目的,就是为服务机器人研究提供一个综合试验平台。研究需要包括语音合成、语音识别、机器人视觉、机器人多信息融合、机器人运动规划、人脸识别、表情识别、人工心理理论的验证和演示等方面。所以依据这些特点,机器人平台采用了上下位机结构,上位机采用计算速度快具有各种外部接口设备、连接存储空间大的PC主板,下位机采用性能价格比高的PIC16F877单片机,上位机和下位机通过RS-232串行口进行连接和通信。上位机主要负责运算量大、计算复杂的图像处理、语音识别和语音合成工作;下位机主要负责传感器信息接收及初级处理、电动机驱动和运动控制等工作。
机器人外观采用中国神话中的孙悟空造型,其外形如图8-11所示。机器人的眼睛由两个USB接口的CCD摄像头组成,负责图像的采集,可以实现机器人视觉效果。机器人的每只手臂由肩部舵机、大臂舵机、肘部舵机、手腕舵机等4个电动机组成,形成4个自由度的多舵机组合系统,能完全模仿人类手臂的全部功能(如握手、挥舞手臂、拥抱等富有人类情感的动作)。机器人胸前有一块800像素×600像素的LCD,主要功能是为机器人系统设置提供可视化操作界面,为语音交互显示提示信息和用于机器人视觉所采集到图像的显示。机器人的语音输出使用音响,音响固定在机器人腿部。机器人的语音输入可以采用有线和无线传声器来实现。机器人的移动由下位机控制的直流电动机来实现轮式移动,并通过胸前和底部的传感器感知障碍来实现避障。机器人硬件结构如图8-12所示。
悟空机器人系统具有如下功能:
1)可通过遥控器控制其行为动作。
2)眼部为两个CCD摄像机。
3)通过到达三个传声器的声音之间的相位差,可推断出声音发出的方向,并使头部转向声音发出的方向。
4)在头部安装了指向前方的传声器。人还可使用无线传声器和机器人进行远距离语音交互。这样机器人就能和人进行更加自然的交互。交互内容主要涉及闲谈、诗词、脑筋急转弯、生活常识、科学常识、旅游常识、地理、文化(饮食文化、风土人情)、点播歌曲、肢体语言、情感交流与表达。
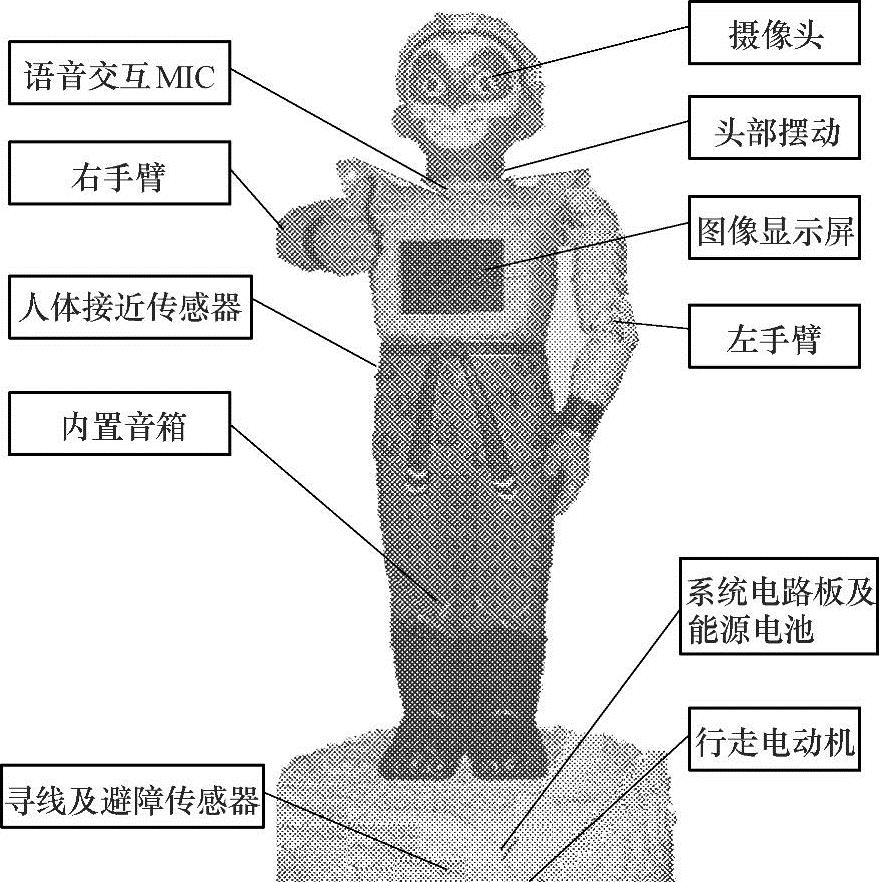
图8-11 机器人外形
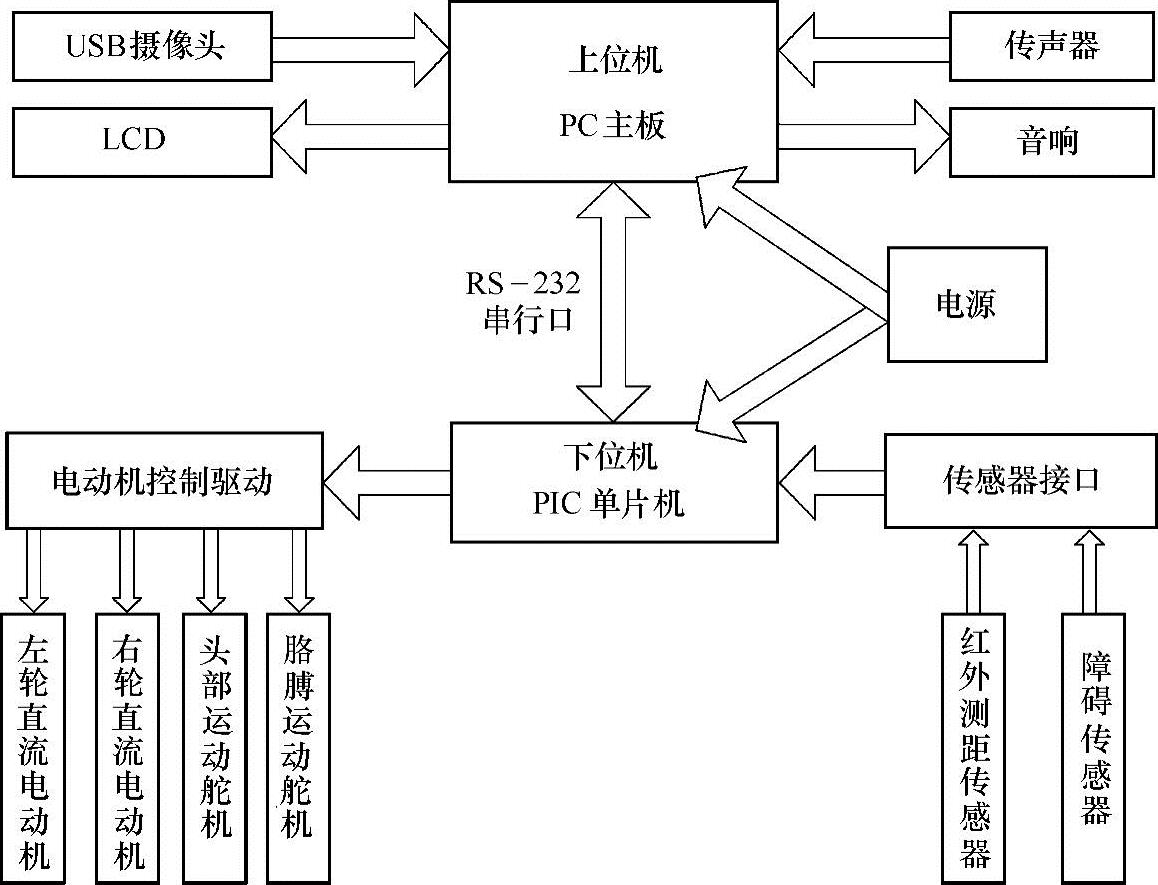
图8-12 机器人硬件结构
5)可利用超声波传感器测量其到物体的距离。(www.daowen.com)
6)它高兴时,或是靠近主人,或是闪动LED(发光二极管),或是翩翩起舞,或是与主人亲密交谈等。
机器人头部有几种不同颜色的LED灯。当它高兴时,会不停地闪动绿灯,不高兴时,会不停地闪动红灯,当它在思考时,也会闪动LED灯。
7)机械手臂可以基本实现人体手臂的各种功能,例如臂部的抬举动作、臂部的前后摆动动作、手臂的弯曲旋转动作。
悟空机器人系统具有如下技术特点:
1)多电动机协调控制及机械结构设计,主要涉及手臂、颈部、机器人头部的电动机控制机械设计;
2)机器人情感模型构建,并能移植在服务机器人中;
3)机器人情感识别与情感表达(面部表情);
4)服务机器人多信息的融合;
5)基于人工心理的服务机器人平台的系统集成;
6)机器人的可遥控操作和远程控制。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





