1.区域标识
由于前期的运动目标检测的结果不能达到要求,比如图像中难免会有许多小的噪声点,还会有许多小的误检区域。去除这些噪声点和误检的区域的方法有很多,可以用各种噪声滤波器,还可以用形态学的许多方法处理。但是,我们发现这些传统方法处理后的结果都不是十分好,对下一步的跟踪工作也帮助不大。前面的检测其实是为后面的跟踪做准备的,如果跟踪的效果不好,那么就更谈不上图像的理解了,所以提出了基于区域标识的目标提取方法。图5-9所示为区域标识的体系流程。

图5-9 区域标识的体系流程
当检测出场景中的运动物体后,二值化的图像中有许多小的噪声点和成块的小区域,这些区域不是要处理的目标,要处理的目标是我们感兴趣的运动区域,所以为了能够对运动物体进行跟踪,要找到物体区域的位置及特征,区域标识的体系流程如图5-9所示。
区域标识就是用一个标记矩阵(Marker),把二值图像中对其感兴趣的区域用符号的形式标记出来。
2.区域标识的标记矩阵
由于检测出运动目标的图像本身包含很多信息,信息如此丰富的图像对于处理也不是很有帮助,因为采用的不是颜色模型,所以通常要把检测出来的包含运动目标的图像进行二值化处理。但是,在已经二值化了的图像中,通常包含的运动目标,不仅仅是感兴趣的区域。比如,在检测车流量时,发现在二值化后的图像中经常会包含骑自行车的人和行人的运动区域,但是我们关心的只是汽车。所以这里涉及了目标识别的问题,而我们提出的区域标识正是为了解决这个问题,区域标识中一个很重要的概念就是标记矩阵。
图5-10所示为标记矩阵的形式。标记矩阵的尺寸通常取成和二值化图像尺寸一样大,当然对于具体的问题,可以取的比二值化图像的尺寸小。标记矩阵中记录的是运动区域的基本特征信息,比如区域的面积、位置等,标记矩阵为区域特征的提取做了很好的前期准备工作。

图5-10 标记矩阵的形式(未标记处元素值为0)
3.标记矩阵和图像矩阵的关系
这里提出的标记矩阵和要处理的图像矩阵是既有区别又有联系的。
区别:
1)标记矩阵是自定义的一个二维矩阵。矩阵中的每个元素值和图像中的像素点的颜色值没有任何直接的联系,它是由我们自己定义的。
2)对于要处理的24位图像矩阵是三维的,每一维分别代表RGB颜色模型中的一种颜色值,图像矩阵中的每个元素的值代表实际图像中对应点的像素值,其范围在0~255之间。
联系:
标记矩阵和图像矩阵中每一点的坐标值在Y和X坐标轴方向上完全重合。
4.二值图像预处理
在复杂背景中,检测出运动物体,并将其图像二值化后,人眼能很明显地从二值图像中观察到运动物体,但是对于计算机来说,它无法知道哪些区域是运动物体,更无法知道目标区域的具体位置。要想跟踪上运动的物体,那么首先必须使计算机知道哪些区域是要跟踪的目标。二值图像的预处理正好解决了这个问题。
区域标识中二值图像的预处理,就是把区域中所有为前景的区域点(比如像素点为白色的区域)用符号的形式标记出来,并用标记矩阵记录下来预处理后的结果。
为了预处理后得到性能良好的标记矩阵,区域标识先后分为两个扫描标记过程:四邻域扫描标记和八邻域扫描标记。
四邻域的扫描标记形式如图5-11所示,八领域的扫描标记形式如图5-12所示。
图5-11 四邻域扫描形式
图5-12 八邻域扫描形式(https://www.daowen.com)
四邻域扫描标记,按照从上到下、从左到右的方向对二值图像进行扫描,如图5-13所示。
八邻域的扫描方向和次序如图5-14所示。其中,图a为Y方向从上到下,X方向从左到右;图b为Y方向从上到下,X方向从右到左;图c为Y方向从下到上,X方向从左到右;图d为Y方向从下到上,X方向从右到左。
5.标记矩阵中的区域合成
二值图像预处理后得到的标记矩阵中的区域可能是零散的、不连续的,并且区域的坐标和面积信息没有统计出来。
区域合成的目的就是将经二值图像预处理后得到的标记矩阵中零散的、不连续的区域重新进行标记,并记录下来区域的坐标位置和区域中像素点的个数,即区域的面积。重新标记后的标记矩阵如图5-15所示,图中区域像素点的面积为24。
图5-13 四邻域扫描标记方向图
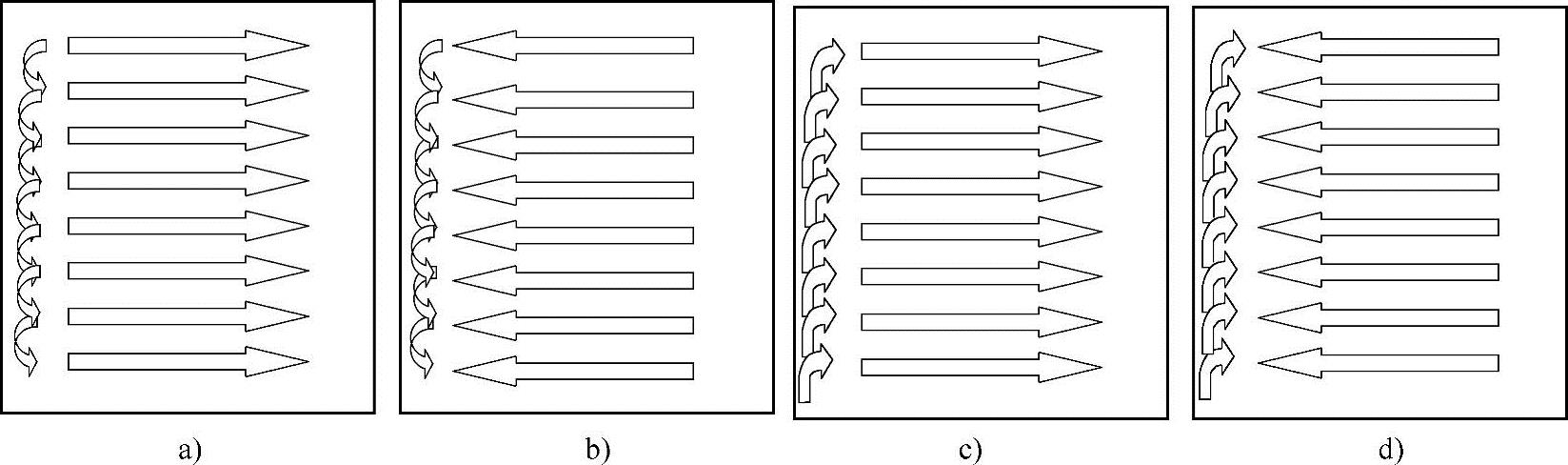
图5-14 八邻域扫描标记方向图
6.区域特征的提取
区域特征提取的目的就是要把分析的目标区域提取出来,把不符合要求的目标过滤掉。这里可以根据识别的具体情况,提取出关于区域的不同特征。
图5-15 区域合成后的标记矩阵
得到区域合成的标记矩阵后,因为标记矩阵中每个区域的面积和位置信息是已知的,所以就可以很容易地对标记矩阵中的每个区域进行区域特征的提取。
对于场景简单的情况下,如果运动的物体之间在形状上有很大差别,那么识别某个物体时,就会很容易。比如,场景中如果只有运动的汽车和人,还有摆动的枝条,那么如果提取人,就很简单了。因为人和汽车以及摆动的枝条在区域面积上的差别就已经非常明显了。
对于在户外选择的视频场景比较简单,所以对于要检测识别出人体的情况,简单地选择了区域像素点的面积(Area)、区域长度(H)和区域宽度(W)作为提取人的区域特征,如图5-16所示。
7.实验
我们根据区域标识的目标提取方法,研制了运动目标提取系统,并对其在室外和室内分别进行了实验。
图5-16 提取人的区域特征描述
图5-17 目标提取和运动检测的结果比较
a)室内原始图片 b)室内检测结果 c)室内目标提取结果 d)室外原始图片 e)室外检测结果 f)室外目标提取结果
首先,在室内和室外两种情况下,运用背景检测模型,对其中的运动物体进行检测,其结果如图5-17b所示。无论是在室内还是室外,都会受到光线和其他一些因素的干扰,从检测的结果中,可以明显地看出干扰的存在,这些干扰的存在对下一步对目标进行识别是非常不利的。
但是,当我们对检测结果进行区域标识后,根据具体的区域特征,就很好地检测出了运动目标,如图5-17c、f所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。






