1.二维离散小波变换的分解
Mallat二维小波分解快速算法可写为
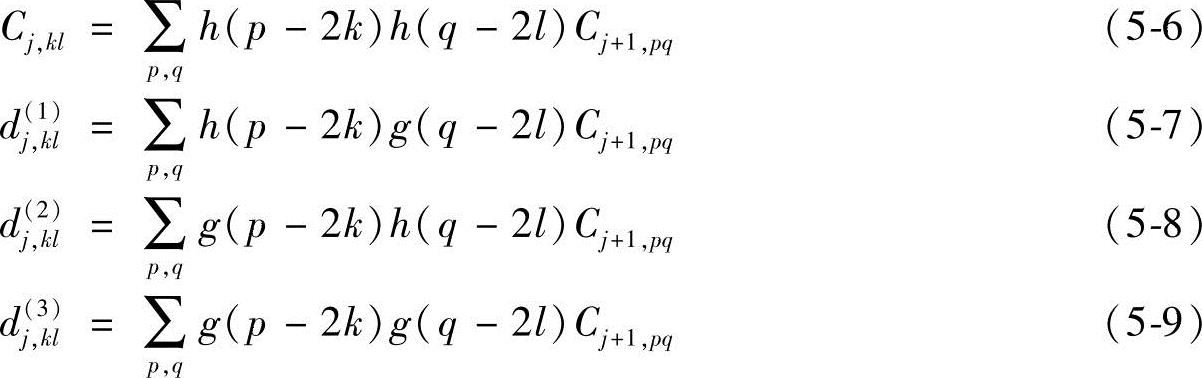
式中,h和g分别是对应同一小波基的低通滤波器和高通滤波器;Cj,kl反映原图像的低频信息,也称平滑像;d(1)j,kl是垂直方向高频、水平方向低频的分量,反映原图的水平边缘;d(2)j,kl是水平方向高频,垂直方向低频的分量,反映原图的垂直边缘;d(3)j,kl是水平方向和垂直方向均为高频的分量,反映原图斜边缘。
当采用由Symlet小波进行图像分解的方法时,symN为双正交小波,小波的支撑长度为2N-1,滤波器长度为2N,具有近似的对称性。
2.基于小波变换的分层块匹配目标跟踪算法
首先对运动图像序列相邻两帧图像进行一层的二维离散小波分解。用两帧图像的低频分量图像进行块匹配,这样做的目的有两个:
1)滤除了原图像的高频噪声,防止了在含噪原图像上进行块匹配时不准确的缺点;
2)在低频分量图像上N×N范围内进行块匹配,相当于在原图像上,在2nN×2nN的范围内进行匹配搜索,其中n为小波分解的层数,匹配搜索采用局部全搜索法。
通过块匹配检测出低频图像背景二维运动向量,即后一帧与前一帧相比,背景在X,Y两方向上运动了多少像素。此运动向量乘以2n后为原图像背景运动向量的大致向量。还要在原图像上进行3×3范围的局部搜索,因为在原图像上背景运动单倍像素在其小波低频图像上是反映不出来的,如在原图上X方向运动3个像素,在小波变换后的低频图像中背景沿X方向运动1个或2个像素。所以还要在原图像上以小波低频图像所测出的运动向量为中心进行3×3范围的局部搜索,以确定图像序列前后两帧背景的准确偏移量。
确定背景偏移量后,把后帧图像各像素按此偏移量进行平移,使后帧与前帧重叠背景在位置上对准,之后进行差分运算,令非重叠部分像素值为零(因为连续两帧背景偏移量很小),差分运算后,不动的背景被减去,运动的目标被检测出来。对差分图像要进行域值处理,因为其中除运动目标之外,还有高频噪声,进行域值处理后可有效地检出运动目标。
检出目标后,计算出运动目标的形心坐标,然后对向前各帧运动向量进行累加,计算出该帧背景相对于第1帧背景的运动向量,然后对形心按累加所得的运动向量进行平移,并进行累加,即可得到运动目标的运动轨迹。
3.块匹配搜索算法
搜索算法采用局部全搜索,如在29×29范围内,用9×9模板进行匹配(假设相邻两帧背景运动向量大小不超过20个像素,在小波低频分量图上,不超过10个像素)。匹配规则用方均误差(Mean Square Error,MSE)规则,得

式中,N×N表示参加匹配运算像素点的个数;(x,y)表示在X,Y方向上发生的偏移量;Z1表示当前帧中需进行运动向量估计的块;Z0是参考帧中位于搜索窗口内的一个候选块。求出Z1、Z0所有对应像素的均方误差C(x,y),再求出其中最小的C(x,y),它所对应的(x,y)就是当前帧相对参考帧的运动向量。(www.daowen.com)
4.运动目标形心的计算
差分后图像已获得了运动目标的分割图,并将此图进行二值化处理,令目标区域像素灰度值为255,其他区域为零。要想获得运动目标的运动轨迹,或要预测运动目标在下一帧中的位置,必须计算出运动目标的形心坐标。假设已知运动目标大小,就可确定一个目标搜索窗,此处选用9×9的搜索窗。然后做全图搜索,当搜索到不为零的目标像素时,就以此像素为中心,在9×9的目标搜索窗内做求取形心计算,即

式中,B(i,j)为搜索窗内各像素点的灰度值;xi、yi为对应各像素点的坐标。运动目标像素点的B(i,j)为255,其他像素点的B(i,j)为0。X(n)、Y(n)为目标形心。如果按上列两式计算,对于一个运动目标可算出一个、两个或更多的形心,因为这时的图像是差分后的图像,所以包含相邻两帧的运动目标。在做形心计算时,有可能搜索窗包含同一运动目标两个图像中的一个或全部,这样计算的形心位置是不同的。
这样就要把不同的形心位置按照横坐标与纵坐标的相近度做分类,把横、纵坐标都很接近的形心坐标分为一类,求取其平均值,作为一个运动目标的形心坐标。
5.扩展Kalman滤波器估计运动目标的位置、速度
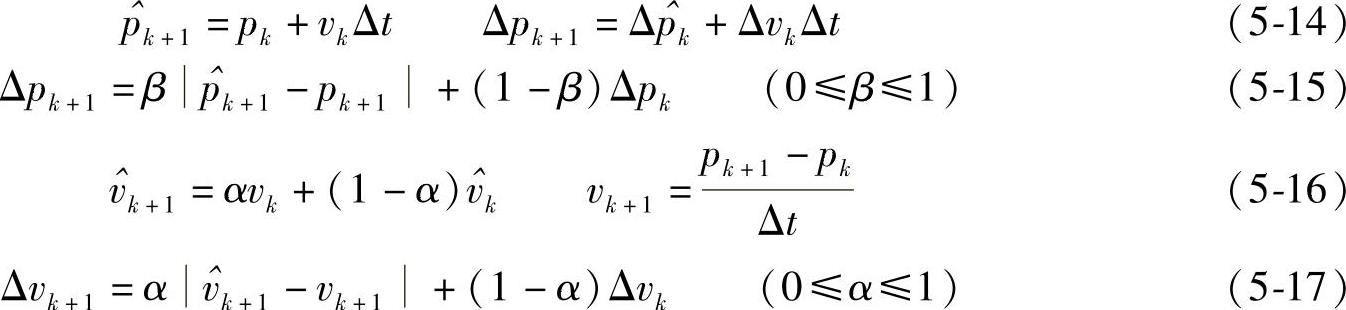
该滤波器由6个参数组成

式中,pk是第k时刻测量得到的目标中心坐标位置; 是第k时刻预测得到的目标中心坐标位置;Δpk是第k时刻搜索目标的范围;vk是目标在第k时刻测量速度;
是第k时刻预测得到的目标中心坐标位置;Δpk是第k时刻搜索目标的范围;vk是目标在第k时刻测量速度; 是目标在第k时刻的估计速度;Δvk是目标在第k时刻的估计速度误差。滤波器参数修正为
是目标在第k时刻的估计速度;Δvk是目标在第k时刻的估计速度误差。滤波器参数修正为
 体现了预测的不准确程度,同时也提供了目标匹配的搜索范围,但实际匹配中,往往扩大搜索范围为
体现了预测的不准确程度,同时也提供了目标匹配的搜索范围,但实际匹配中,往往扩大搜索范围为 (ε为预设正常数)。
(ε为预设正常数)。
式(5-14)、式(5-15)、式(5-16)以及式(5-17)都是滤波器各个参数的修正公式。通过以上一系列步骤,实现了运动背景下运动目标的跟踪,该方法即为基于小波变换的分层块匹配目标跟踪算法,与传统的块匹配算法相比,该方法滤除了原图像的高频噪声,防止了在含噪原图像上进行块匹配不准确的缺点;另外在低频分量图像上N×N范围内进行块匹配,相当于原图像上在2nN×2nN的范围内进行匹配搜索,搜索速度快。但是此算法主要针对有明显特征的运动背景,对于没有明显特征的纹理背景(如海面、天空等)而言,该算法并不适用。
综上所述,跟踪运动物体的方法主要有基于模型的跟踪方法、基于区域的跟踪方法、基于活动轮廓的跟踪方法和基于特征的跟踪方法。这些方法都可以应用于运动员的跑步模板,如图5-8所示。
图5-8 运动员跑步模板
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。





